




[仿真环境]
matlab
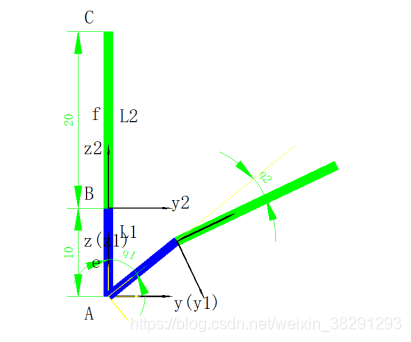
如图:二连杆由杆AB和杆BC组成,e,f为杆的重心位置,其中杆AB的长度为l2,杆BC的长度为l2。如图建立坐标系,坐标系y1oz1与杆AB固连,坐标系y2oz2与杆BC固连,即坐标系将跟着坐标系一起运动。将杆各自旋转一定角度,q1为杆AB的旋转角度,q2为杆BC旋转的角度,如图所示。将各点的位置以向量的形式表述。
首先定义基坐标系的轴向量为相互正交的单位向量:

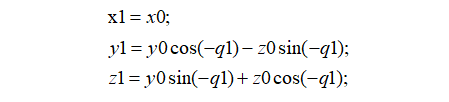
将旋转后的坐标系用基坐标系表达:(逆时针为正,顺时针为负)
坐标系x1y1z1
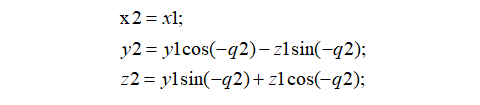
坐标系x2y2z1(相对于x1y1z1坐标系):
由上可得旋转矩阵:
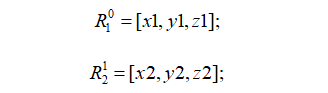
根据链式法则可得:
因此可以得到各点的位置向量相
二连杆正/逆运动建模
最新推荐文章于 2025-09-10 10:38:24 发布
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3325
3325




 到【灌水乐园】发言
到【灌水乐园】发言







