






 这篇博客介绍了如何在PLC编程中使用梯形图和ST语言实现方波输出,特别针对没有特殊寄存器的情况。通过实例详细解释了如何利用定时器编写自定义方波,并探讨了功能块的封装和ST语言的优势,强调理解原理和掌握方法的重要性。适合初学者深入理解PLC编程。
这篇博客介绍了如何在PLC编程中使用梯形图和ST语言实现方波输出,特别针对没有特殊寄存器的情况。通过实例详细解释了如何利用定时器编写自定义方波,并探讨了功能块的封装和ST语言的优势,强调理解原理和掌握方法的重要性。适合初学者深入理解PLC编程。
在PLC编程中,方波输出是我们经常需要使用的,比如,设备出现严重故障,需要报警,那么我们就可以让蜂鸣器每一秒响一次,提醒维护人员注意,在这里,我们就需要用到1秒脉冲输出。如果使用梯形图编程,如下所示

如上图所示,其中1S,是表示一个1S 脉冲输出的变量。在大多数PLC中,都是使用特殊寄存器来实现方波输出的。比如1S,100MS,5S 等等。在编程时,我们直接调用即可。
但是,如果我们要使用系统不提供特殊寄存器的方波怎么办?要使用高低电平不等的方波怎么办?比如 高电平3S,低电平2S。那就只能自己写一个了,使用定时器即可完成

如上图所示,这是小编用定时器写的,看红色记号表表示的部分,就是我们定义的时间,在这里高电平时间3S,低电平时间2S。而中间继电器M100的变化,就是我们所需要的。
当然,实现方波输出,有很多种方法,这只是其中的一种。初学者如果能认真钻研这段程序,那么,你对PLC编程的基础要素,定时器的使用就能掌握。
如果我们要多次使用怎么办?总不能每次都复制粘贴吧,最好的方法就是做成功能块,直接调用即可。但是,使用梯形图编写功能块,其移植性就大大降低,因为你无法从三菱PLC复制到西门子PLC,欧姆龙PLC或是其他PLC,最好的方法,当然是使用ST语言编程。
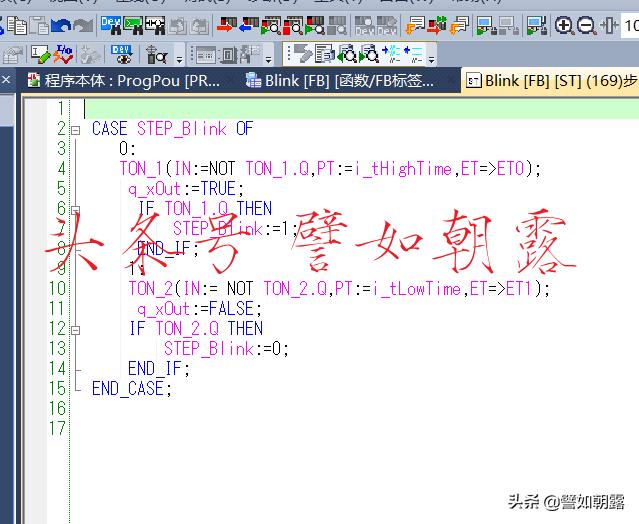
如图所示,我们定义一个功能块BLINK,使用ST语言编写,在这里,小编并没有把梯形图翻译成ST语言,而是采用了全新的思路。所以说,ST语言相对于梯形图编程,是一种全新的思维模式,和处理问题的方法,如果你能熟练掌握,会大大缩短程序开发时间。这也是小编经常说的,掌握方法,理解原理才是最重要的,比你学会一万条指令都有用,也比你天天哔哔梯形图直观易懂,便于入门更重要。
封装好之后,我们就可以直接调用了
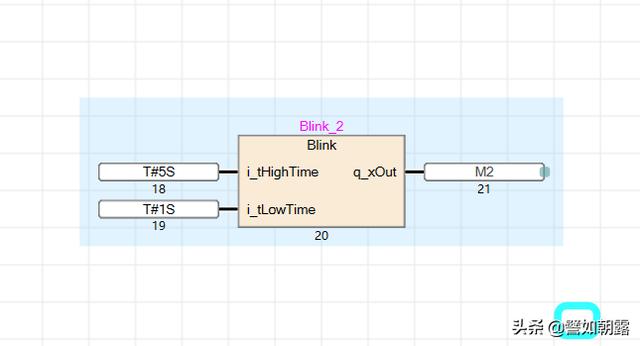
如上图所示,这个功能块有两个输入变量 分别是i_tHighTime 和i_tLowTime 分别表示方波输出的高电平时间和低电平时间。一个输出变量 q_xOut。
对于初学者来说,特别是零基础入门的电工朋友,如果你能仔细研究这段梯形图和ST语言,你就掌握了PLC的工作原理和梯形图的编程方式,对ST语言也有认识。希望能认真钻研。你可以根据本文的图片,自己写出来,如果你需要源程序,只需要赞赏本文1.9元,即可获取。软件使用三菱PLC的GX WORKS3 编写。

















 3266
3266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









