







我造轮子,你造车,创客一起造起来!更多塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
本文介绍使用X-CTR100控制器搭建4WD智能小车平台,也同样适用于2WD。
硬件
器件组成
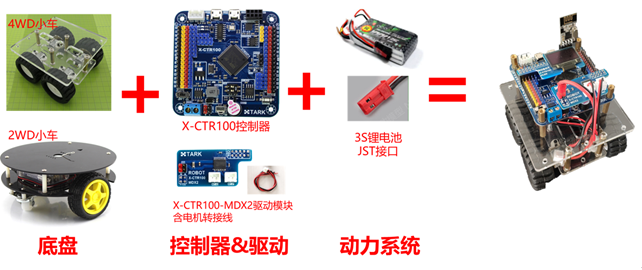
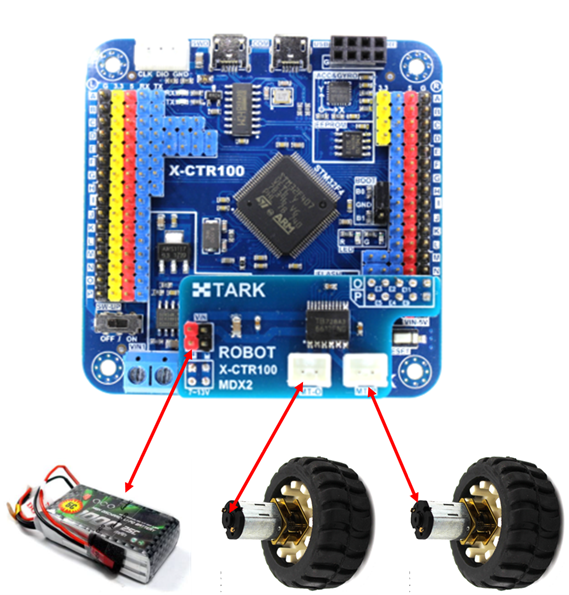
连接关系,没错就这么简单!
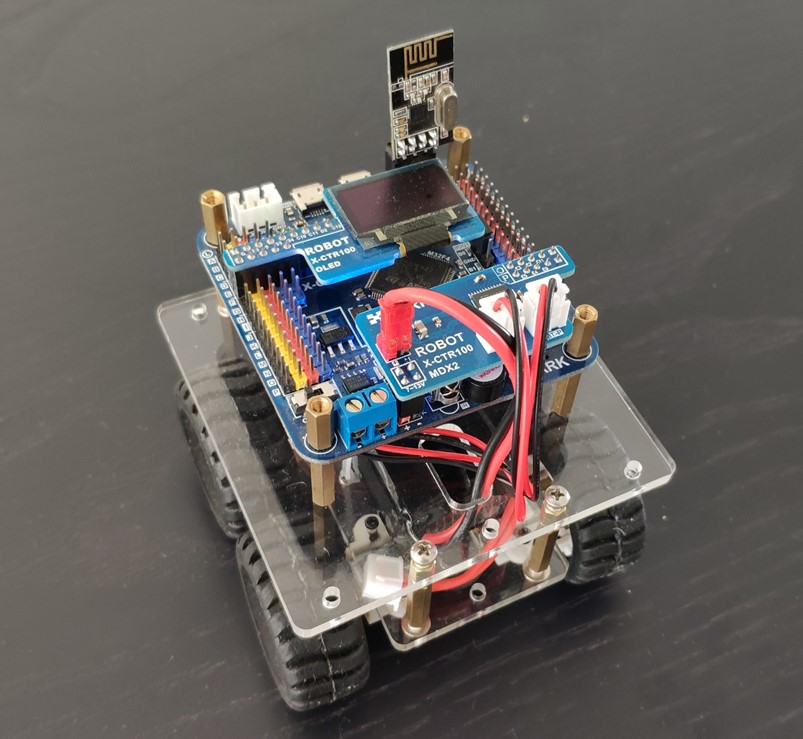
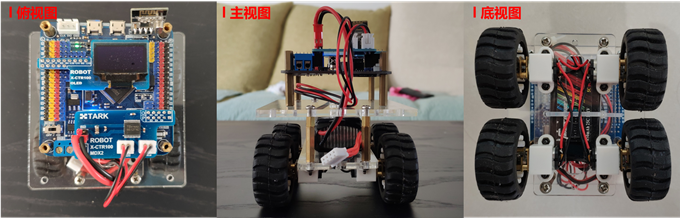
实物图
软件
X-CTR100控制器X-API已经包含电机控制驱动代码,使用非常简单,只需调用接口函数,测试代码如下,实现智能小车变速前进和变速后退。
int main(void) { uint8_t temp;
//X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 4WD智能车调速测试例程***\r\n\r\n");
//模块初始化及配置 AX_MOTOR_TIM1_MNOP_Init(20); //初始化电机控制端口,PWM频率为20KHz
printf("*小车变速前进后退测试\r\n");
while (1) { printf("*小车增速前进\r\n"); for(temp=0; temp<=200; temp++) { AX_MOTOR_TIM1_O_SetSpeed(temp); AX_MOTOR_TIM1_P_SetSpeed(temp); AX_Delayms(30); } AX_MOTOR_TIM1_O_SetSpeed(0); AX_MOTOR_TIM1_P_SetSpeed(0); AX_Delayms(1000);
printf("*小车增速后退\r\n"); for(temp=0; temp<=200; temp++) { AX_MOTOR_TIM1_O_SetSpeed(-temp); AX_MOTOR_TIM1_P_SetSpeed(-temp); AX_Delayms(30); } AX_MOTOR_TIM1_O_SetSpeed(0); AX_MOTOR_TIM1_P_SetSpeed(0); AX_Delayms(1000); } } |
该平台只是个基础平台,后续很多模块的应用将基于该平台测试应用,例如使用PS2无线手柄控制小车。

















 1308
1308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









