



 本文介绍了CANFD协议,针对传统CAN总线带宽不足的问题,详细阐述了CANFD的技术特点,包括可变速率传输、增强的数据场长度、新的CRC算法及DLC编码方式,并提供了SylixOS中CANFD的具体实现方案。
本文介绍了CANFD协议,针对传统CAN总线带宽不足的问题,详细阐述了CANFD的技术特点,包括可变速率传输、增强的数据场长度、新的CRC算法及DLC编码方式,并提供了SylixOS中CANFD的具体实现方案。
CAN FD简介
1 CAN FD简介
在汽车领域,随着人们对数据传输带宽要求的增加,传统的CAN总线由于带宽的限制难以满足这种增加的需求。此外为了缩小CAN网络(max. 1MBit/s)与FlexRay(max.10MBit/s)网络的带宽差距,BOSCH公司推出了CAN FD。
CAN FD(CAN with Flexible Data rate)继承了CAN总线的主要特性。CAN总线采用双线串行通讯协议,基于非破坏性仲裁技术,分布式实时控制,可靠的错误处理和检测机制使CAN总线有很高的安全性,但CAN总线带宽和数据场长度却受到制约。CAN FD总线弥补了CAN总线带宽和数据场长度的制约,CAN FD总线与CAN总线的区别主要在以下两个方面:
1. 可变速率:CAN FD采用了两种位速率。从控制场中的BRS位到ACK场之前(含CRC分界符)为可变速率,其余部分为原CAN总线用的速率。两种速率各有一套位时间定义寄存器,它们除了采用不同的位时间单位TQ外,位时间各段的分配比例也可不同;
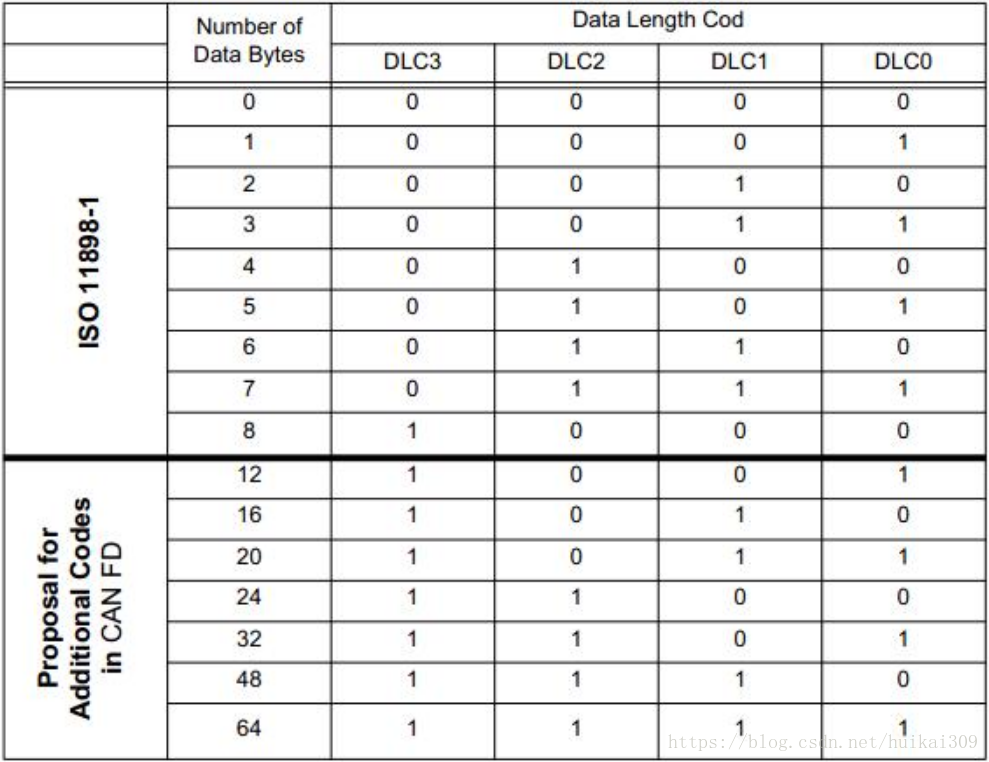
2. 新的数据场长度:CAN FD对数据场的长度作了很大的扩充,DLC最大支持64个字节,在DLC小于等于8时与原CAN总线是一样的,大于8时有一个非线性的增长,所以最大的数据场长度可达64字节。
1.1 CAN FD数据帧帧格式
CAN FD数据帧在控制场新添加EDL位、BRS位、ESI位,采用了新的DLC编码方式、新的CRC算法(CRC场扩展到21位)。CAN FD数据帧格式如下图所示。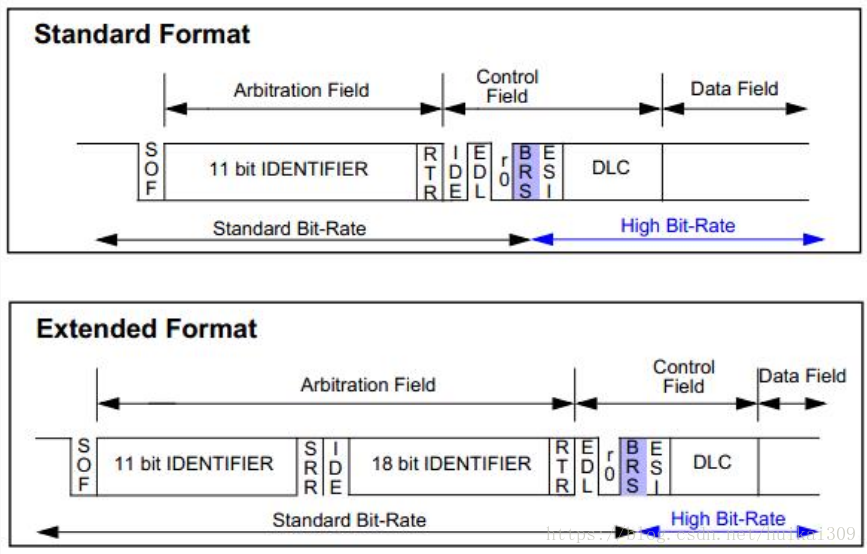
1.2 新添加位介绍
- EDL位(Extended Data Length):原CAN数据帧中的保留位R。隐性表示CAN FD报文(采用新的DLC编码和CRC算法),显性表示CAN报文;
- BRS位(Bit Rate Switch):该位隐性表示转换可变速率,显性表示不转换速率;
-
ESI位(Error State Indicator):该位隐性表示发送节点处于被动错误状态(Error Passive),显性表示发送节点处于主动错误状态(Error Active);
EDL位可以表示CAN报文还是CAN FD报文;BRS表示位速率转换,该位为隐性位时,从BRS位到CRC界定符使用转换速率传输,其他位场使用标准位速率,该位为显性时,以正常的CAN FD总线速率传输;通过添加ESI位,可以很方便的知道当前发送节点所处的状态。1.3 新的CRC算法
CAN总线由于位填充规则对CRC的干扰,造成错帧漏检率未达到设计意图。CAN FD对CRC算法做了改变,即CRC以含填充位的位流进行计算。在校验和部分为避免再有连续位超过6个,就确定在第一位以及以后每4位添加一个填充位加以分割,这个填充位的值是上一位的反码,作为格式检查,如果填充位不是上一位的反码,就作出错处理。CAN FD的CRC场扩展到了21位。由于数据场长度有很大变化区间,所以要根据DLC大小应用不同的CRC生成多项式,CRC_17,适合于帧长小于210位的帧,CRC_21,适适合于帧长小于1023位的帧。
1.4 新的DLC编码
CAN FD数据帧采用了新的新的DLC编码方式,在数据场长度在0-8个字节时,采用线性规则,数据场长度为12-64个字节时,使用非线性编码。如下图所示。
2 SylixOS中CAN FD的实现
2.1 CAN驱动实现
SylixOS的CAN驱动框架在原有CAN的基础上增加了对CAN FD的支持。对应于新的CAN帧格式,SylixOS增加了新的帧结构定义,如下所示。
typedef struct { UINT32 CAN_uiId; UINT32 CAN_uiChannel; BOOL CAN_bExtId; BOOL CAN_bRtr; UINT32 CAN_uiCanFdFlags; #define CAN_FD_FLAG_EDL 1 #define CAN_FD_FLAG_BRS 2 #define CAN_FD_FLAG_ESI 4 UCHAR CAN_ucLen; UCHAR CAN_ucData[CAN_FD_MAX_DATA]; } CAN_FD_FRAME; typedef CAN_FD_FRAME *PCAN_FD_FRAME;为了同时兼容CAN与CAN FD,系统在创建CAN设备申请帧缓冲区时,以帧结构较大的CAN FD帧报文为单位进行申请。同时通过ioctl新增加的CAN_DEV_CAN_FD选项查看CAN设备驱动以及控制器是否支持CAN FD。此次查询决定了后续驱动对帧缓冲区进行读写时的帧报文格式,即标准CAN或CAN FD。因此CAN FD驱动的ioctl接口除了要实现标准CAN驱动的选项外,还要额外实现CAN_DEV_CAN_FD选项,如下所示。
case CAN_DEV_CAN_FD: *(UINT *)lArg = CAN_STD_CAN_FD; break;2.2 应用层实现
应用层需要收发CAN FD报文时,必须通过ioctl的CAN_FIO_CAN_FD选项对CAN FD进行设置,如下所示。
CAN_FD_FRAME canfdframe[10]; ssize_t size; ssize_t frame_num; long status; ... canfile = open("/dev/can0", O_RDWR); ioctl(canfile, CAN_DEV_SET_MODE, 1); ioctl(canfile, CAN_DEV_SET_BAUD, LW_OSIOD_LARG(*)); /* * must call this before read() write() */ ioctl(canfile, CAN_FIO_CAN_FD, CAN_STD_CAN_FD); ioctl(canfile, CAN_DEV_STARTUP); size = read(canfile, canfdframe, 10 * sizeof(CAN_FD_FRAME)); frame_num = size / sizeof(CAN_FD_FRAME); if (frame_num <= 0) { ioctl(canfile, CAN_DEV_GET_BUS_STATE, &status); ... ioctl(canfile, CAN_DEV_REST_CONTROLLER); } ... size = write(canfile, canfdframe, 10 * sizeof(CAN_FD_FRAME)); frame_num = size / sizeof(CAN_FD_FRAME);3 参考资料
《CAN FD协议介绍》:http://www.cechina.cn/company/50633_156096/messagedetail.aspx
转载于:https://blog.51cto.com/12557713/2131591

















 2379
2379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









