






 本文详细介绍了STM32中GPIO_Pin和GPIO_PinSource的区别,指出GPIO_Pin用于配置端口的基本属性,而GPIO_PinSource用于配置端口的复用功能。在STM32官方库中,这两个参数的定义不同,易引起混淆,作者提醒开发者注意区分。为避免配置问题,建议使用STM32CUBE库进行开发。
本文详细介绍了STM32中GPIO_Pin和GPIO_PinSource的区别,指出GPIO_Pin用于配置端口的基本属性,而GPIO_PinSource用于配置端口的复用功能。在STM32官方库中,这两个参数的定义不同,易引起混淆,作者提醒开发者注意区分。为避免配置问题,建议使用STM32CUBE库进行开发。
今天在端口复用时遇到了困惑,参考:http://www.51hei.com/bbs/dpj-40992-1.html
调整前的代码
GPIO_PinAFConfig(GPIOA,GPIO_Pin_9,GPIO_AF_4);
GPIO_PinAFConfig(GPIOA,GPIO_Pin_10,GPIO_AF_4);
调整后的代码
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_4);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_4);
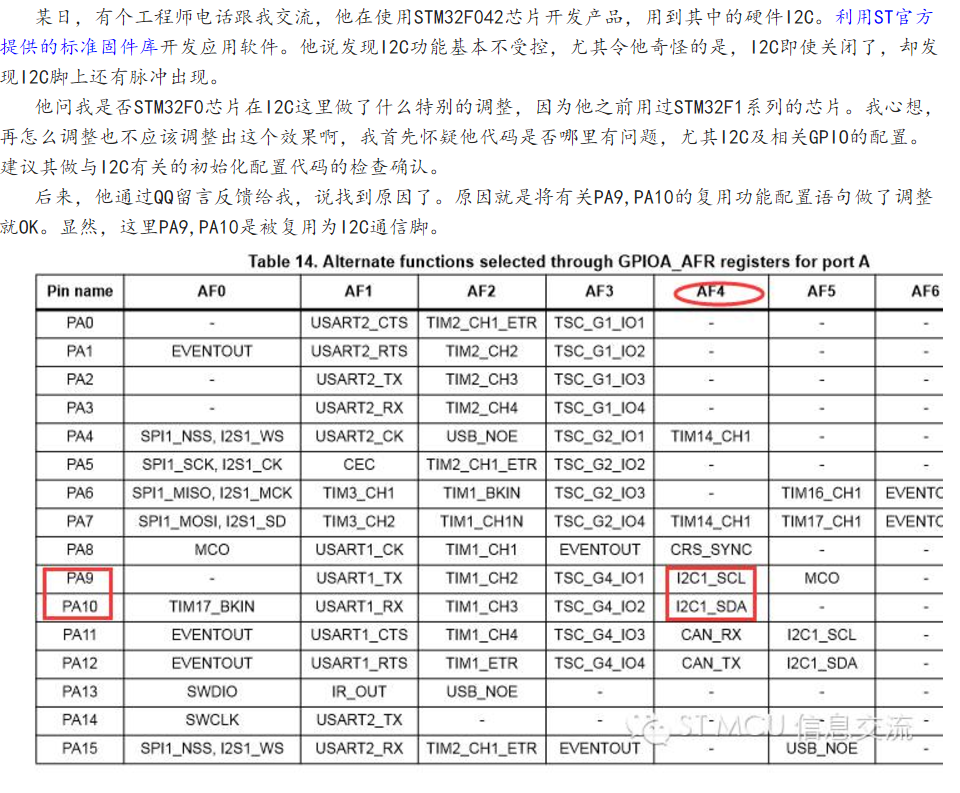
不难看出,该工程师调整的就是上面红色参数部分。一个是GPIO_Pin_N,一个是GPIO_PinSourceN,其实这2个参数是不一样的。
GPIO_Pin_n可以理解为某端口脚在整个端口的位置。比方某GPIO口的第6管脚位置编码GPIO_Pin_6 被定义为 ((uint16_t)0x0040) ,在对相应GPIO管脚做基本属性配置时会用到,如配置输入输出模式、模拟输入模式的选择等。有兴趣的话,可以点击GPIO_Init( )进去看看。
而GPIO_PinSourceN一般是在对某GPIO口相应pin脚的复用功能进行选择配置才会用到。它是根据端口各脚位的位置按顺序从0开始依次递增编号,可以理解为该管脚在该端口的序号。比方某GPIO口的第6号复用功能脚的序号GPIO_PinSource6 被定义为 ((uint8_t)0x06) 。有兴趣的话,也可以打开GPIO_PinAFConfig( )函数看看。显然,GPIO_PinSource6跟上面的GPIO_Pin_6的值相差甚远。
下面是ST官方库代码中有关GPIO_Pin_N的定义:
#define GPIO_Pin_0 ((uint16_t)0x0001)
#define GPIO_Pin_1 ((uint16_t)0x0002)
#define GPIO_Pin_2 ((uint16_t)0x0004)
#define GPIO_Pin_3 ((uint16_t)0x0008)
#define GPIO_Pin_4 ((uint16_t)0x0010)
#define GPIO_Pin_5 ((uint16_t)0x0020)
#define GPIO_Pin_6 ((uint16_t)0x0040)
#define GPIO_Pin_7 ((uint16_t)0x0080)
#define GPIO_Pin_8 ((uint16_t)0x0100)
#define GPIO_Pin_9 ((uint16_t)0x0200)
#define GPIO_Pin_10 ((uint16_t)0x0400)
。。。。。。
#define GPIO_Pin_15 ((uint16_t)0x8000)
#define GPIO_Pin_All ((uint16_t)0xFFFF)
下面是有关GPIO_PinSourceN的定义:
#define GPIO_PinSource0 ((uint8_t)0x00)
#define GPIO_PinSource1 ((uint8_t)0x01)
#define GPIO_PinSource2 ((uint8_t)0x02)
#define GPIO_PinSource3 ((uint8_t)0x03)
#define GPIO_PinSource4 ((uint8_t)0x04)
#define GPIO_PinSource5 ((uint8_t)0x05)
#define GPIO_PinSource6 ((uint8_t)0x06)
#define GPIO_PinSource7 ((uint8_t)0x07)
#define GPIO_PinSource8 ((uint8_t)0x08)
#define GPIO_PinSource9 ((uint8_t)0x09)
#define GPIO_PinSource10 ((uint8_t)0x0A)
。。。。。。
#define GPIO_PinSource15 ((uint8_t)0x0F)
小结:上面的问题只有基于STM32官方固件库开发时才会碰到。说实在的,这两个参数的确容易让人误解成一个东西或者弄混淆,尤其刚接触的人。经常有人在这个地方遇到麻烦,之前我在一篇文章中提到过。这里再特意提醒下。
不过ST官方后来推出的STM32CUBE库在这个地方的代码写法做了调整,不再定义GPIO_PinSourceN。当然,因为管脚配置导致异常的问题时有发生,建议使用ST官方推出的STM32CUBE配置环境及CUBE参考固件库着手开发,这样会省不少事。


















 853
853

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









