



 本文探讨了解析几何中涉及的各种问题解决方法,包括伸缩变换、参数方程与极坐标方程转换、求曲线上的点到直线的距离最值等问题,通过具体实例展示了不同情境下的解题策略。
本文探讨了解析几何中涉及的各种问题解决方法,包括伸缩变换、参数方程与极坐标方程转换、求曲线上的点到直线的距离最值等问题,通过具体实例展示了不同情境下的解题策略。
一、考向总结
A、借助三角函数知识考察,比如利用三角函数求最值;
B、借助直线的参数方程的参数\(t\)的几何意义考察,比如求线段的长度;
C、借助平面几何知识考察,比如求倾斜角等;
D、借助极坐标考查面积,线段长度等,
E、借助解析几何考查,比如相关点法求轨迹,
F、借助极坐标直接思考运算,不再转化到直角坐标系下思考;
G、相关弦长公式:
\(|AB|\xlongequal[韦达定理]{直角坐标系下}\sqrt{(x_1-x_2)^2+(y_1-y_2)^2}=|x_1-x_2|\cdot \sqrt{1+k^2}\)
\(= \sqrt{(x_1+x_2)^2-4x_1x_2}\cdot \sqrt{1+k^2}\)
\(|AB|\xlongequal[极角相同]{极坐标系下}|\rho_1-\rho_2|\)
\(|AB|\xlongequal[参数的几何意义]{参数方程下}|t_1-t_2|\)
二、常见考查方向整理
1、考查伸缩变换
例01【伸缩变换】【2016洛阳模拟】已知曲线$C$的极坐标方程是$\rho=2$,以极点为原点,极轴为$x$轴的正半轴建立平面直角坐标系,直线$l$的参数方程为 $\begin{cases}x=1+t\\y=2+\sqrt{3}t\end{cases}(t为参数)$, (1)写出直线$l$的普通方程与曲线$C$的直角坐标方程; (2)设曲线$C$经过伸缩变换$\begin{cases}x'=x\\y'=\cfrac{1}{2}y\end{cases}$得到曲线$C'$, 设$M(x,y)$为曲线$C'$上任意一点,求$x^2-\sqrt{3}xy+2y^2$的最小值,并求相应的点$M$的坐标。 分析:(1)消去参数$t$,得到直线$l$的普通方程为$\sqrt{3}x-y-\sqrt{3}+2=0$ 由$\rho=2$,得到曲线$C$的直角坐标方程为$x^2+y^2=4$; (2)曲线$C:x^2+y^2=4$经过伸缩变换$\begin{cases}x'=x\\y'=\cfrac{1}{2}y\end{cases}$得到曲线$C'$, 即将$x=x',y=2y'$代入$C:x^2+y^2=4$得到,$x'^2+4y'^2=4$, 整理得到曲线$C':\cfrac{x^2}{4}+y^2=1$。 由曲线$C'$的参数方程得到点$M(2cos\theta,sin\theta)$, 即$x=2cos\theta,y=sin\theta$,代入得到 $x^2-\sqrt{3}xy+2y^2=(2cos\theta)^2-\sqrt{3}\cdot 2cos\theta\cdot sin\theta+2sin^2\theta$ $=4cos^2\theta+2sin^2\theta-\sqrt{3}sin2\theta$ $=2+2cos^2\theta-\sqrt{3}sin2\theta$ $=2+1+cos2\theta-\sqrt{3}sin2\theta$ $=3-2sin(2\theta-\cfrac{\pi}{6})$ 当$2\theta-\cfrac{\pi}{6}=2k\pi+\cfrac{\pi}{2}(k\in Z)$, 即$\theta=k\pi+\cfrac{\pi}{3}(k\in Z)$时, 即点$M(1,\cfrac{\sqrt{3}}{2})$或$M(-1,-\cfrac{\sqrt{3}}{2})$时, $x^2-\sqrt{3}xy+2y^2$的最小值为1.
2、参数方程与直角坐标方程的互化,极坐标方程与直角坐标方程的互化
例02(方程间的互化)在直角坐标系$xOy$中,直线$l$是过定点$P(4,2)$且倾斜角为$\alpha$的直线;在极坐标系中,曲线$C$的极坐标方程为$\rho=4cos\theta$.
⑴写出直线$l$的参数方程,并将曲线$C$的极坐标方程化为直角坐标方程;
分析:直线$l$的参数方程为$\begin{cases} x=4+cos\alpha\cdot t \\ y=2+sin\alpha\cdot t \end{cases}(t为参数)$,
曲线$C$的直角坐标方程为$x^2+y^2=4x$;
(2016全国卷Ⅱ第23题高考真题)在直角坐标系$xOy$中,圆$C$ 的方程为$(x+6)^2+y^2=25$.
(1)以坐标原点为极点,$x$轴的正半轴为极轴建立极坐标系,求$C$的极坐标方程。
分析:由于极坐标方程中只有$\rho$和$\theta$,
故只要将$x=\rho\cdot cos\theta$和$y=\rho\cdot sin\theta$代入圆$C$的直角坐标方程为$(x+6)^2+y^2=25$,
整理可得$\rho^2+12\rho cos\theta+11=0$。
解后反思:
1、消参的方法有代入消参,加减消参,乘除消参,和平方消参等
乘除消参,比如$\begin{cases}x=t cos\theta\\y=t sin\theta\end{cases}(t为参数)$ ,两式相除得到$y=tan\theta x$,
再比如$\begin{cases}y=k(x-2)\\y=\cfrac{1}{k}(x+2)\end{cases}(k为参数)$
两式相乘,消去参数$k$,得到$y^2=x^2-4$,
2、直角坐标方程与极坐标方程的转化公式。
3、利用直线的参数方程几何意义求弦长
例03在直角坐标系$xOy$中,直线$l$的参数方程为$\begin{cases} x=3-\cfrac{\sqrt{2}}{2}\cdot t \\ y=\sqrt{5}+\cfrac{\sqrt{2}}{2}\cdot t \end{cases}(t为参数)$,在极坐标系中圆$C$的方程为$\rho=2\sqrt{5}sin\theta$.
⑴求圆的直角坐标方程;
⑵设圆$C$与直线$l$交于点$A、B$,若点$P$的坐标为$(3,\sqrt{5})$,求$|PA|+|PB|$.
分析: ⑴简解,$x^2+(y-\sqrt{5})^2=5$
⑵思路一:将直线和圆的直角坐标方程联立,
求得交点$A、B$的坐标,
能否用两点间的坐标公式求解$|PA|+|PB|$.
思路二:利用直线参数方程的参数的几何意义,
将直线的参数方程$\begin{cases} x=3-\cfrac{\sqrt{2}}{2}\cdot t \\ y=\sqrt{5}+\cfrac{\sqrt{2}}{2}\cdot t \end{cases}(t为参数)$
代入圆的直角坐标方程,
得到$(3-\cfrac{\sqrt{2}}{2}\cdot t)^2+(\sqrt{5}+\cfrac{\sqrt{2}}{2}\cdot t -\sqrt{5})^2=5$
整理为$t^2-3\sqrt{2}t+4=0$,
由于$\Delta >0$,故可设点$A、B$分别对应参数$t_1,t_2$,
则$\begin{cases} t_1+ t_2=3\sqrt{2} \\ t_1\times t_2=4 \end{cases}$,
由此可以看出$t_1>0,t_2>0$,
故$|PA|=t_1,|PB|=t_2$,所以$|PA|+|PB|=3\sqrt{2}$.
解后反思:
1、这样的解法比利用两点间的距离公式的计算量要小得多。
2、求$|PA|\cdot |PB|=|t_1t_2|=t_1t_2=4$,务必注意两个根的正负,这与去绝对值符号有极大的关系。
3、求$|AB|=|t_1-t_2|$
4、求$\cfrac{1}{|PA|}+\cfrac{1}{|PB|}=\cfrac{|PA|+|PB|}{|PA||PB|}=\cfrac{t_1+t_2}{t_1t_2}$
5、若是出现了$t_1$和$t_2$中有一个负值的情形,如何求$|PA|+|PB|$呢?
不妨令$t_1<0$,$t_2>0$,则有$|PA|=|t_1|=-t_1$,$|PB|=|t_2|=t_2$,
那么$|PA|+|PB|=t_2-t_1=|t_2-t_1|$,
6、还可能会怎么考查呢?
比如已知$|PA|、|AB|、|PB|$成等比数列,这样$|AB|=|t_1-t_2|$,$|PA||PB|=|t_1t_2|$,且有$|AB|^2=|PA||PB|$,
比如已知$t_1+t_2=\cfrac{12\sqrt{3}}{13}$,$t_1t_2=-\cfrac{36}{13}$求$||PA|-|PB||$的值,
由$t_1t_2<0$,则可知$t_1、t_2$异号,那么可能$t_1<0,t_2>0$或者$t_1>0,t_2<0$,
则$||PA|-|PB||=|-t_1-t_2|=|t_1+t_2|=\cfrac{12\sqrt{3}}{13}$,或$||PA|-|PB||=|t_1-(-t_2)|=|t_1+t_2|=\cfrac{12\sqrt{3}}{13}$,
4、利用直线的参数方程几何意义求弦长的取值范围,
例04在极坐标系中,已知圆$C$的圆心$C(\sqrt{2},\cfrac{\pi}{4})$,半径$r=\sqrt{3}$,
(1)求圆$C$的极坐标方程。
(2)若$\alpha \in[0,\cfrac{\pi}{4}]$,直线$l$的参数方程为$\begin{cases} x=2+cos\alpha\cdot t \\ y=2+sin\alpha\cdot t \end{cases}(t为参数)$,
直线$l$交圆$C$于$A、B$两点,求弦长$|AB|$的取值范围。
解:(1)圆$C$的圆心$C(\sqrt{2},\cfrac{\pi}{4})$,
得$C$的直角坐标为$(1,1)$,
所以圆$C$的直角坐标方程为$(x-1)^2+(y-1)^2=3$,
由$x=\rho cos\theta,y=\rho sin\theta$得到,
圆$C$的极坐标方程为$\rho^2-2\rho cos\theta-2\rho sin\theta-1=0$。

(2)将 $\begin{cases} x=2+cos\alpha\cdot t \\y=2+sin\alpha\cdot t \end{cases}(t为参数)$,
代入圆$C$的直角坐标方程为$(x-1)^2+(y-1)^2=3$,
得到$t^2+2(cos\alpha+sin\alpha)t-1=0$,
则有$\Delta= 4(cos\alpha+sin\alpha)^2+4>0$,
设$A、B$两点对应的参数分别为$t_1,t_2$,
则由韦达定理可知,
$t_1+t_2=2(cos\alpha+sin\alpha),t_1\cdot t_2= -1$
所以弦长$|AB|=|t_1-t_2|=\sqrt{(t_1+t_2)^2-4t_1t_2}=\sqrt{8+4sin2\alpha}$,
由于$\alpha \in[0,\cfrac{\pi}{4}]$, 所以$sin2\alpha\in[0,1]$,$8+4sin2\alpha\in[8,12]$,
所以弦长$|AB|\in[2\sqrt{2},2\sqrt{3}]$。
5、求曲线上的点到直线的距离的最值
例05【自编】给定椭圆$\cfrac{x^2}{3}+y^2=1$和直线$x+y-8=0$,已知点P是椭圆上的一个动点,求点P到直线的距离的最小值。
分析:首先易知椭圆和直线没有交点,即二者相离,从而可以考虑用椭圆的参数方程或平行线法求解。
法1、利用椭圆的参数方程,由椭圆方程$\cfrac{x^2}{3}+y^2=1$可知,
动点坐标$P(\sqrt{3}cos\theta,sin\theta)$,
则点P到直线$x+y-8=0$的距离
$d(\theta)=\cfrac{|\sqrt{3}cos\theta+sin\theta-8|}{\sqrt{2}}=\cfrac{|2sin(\theta+\cfrac{\pi}{3})-8|}{\sqrt{2}}$,
故当$sin(\theta+\cfrac{\pi}{3})=1$时,$d_{min}=\cfrac{|2-8|}{\sqrt{2}}=3\sqrt{2}$;
$sin(\theta+\cfrac{\pi}{3})=-1$时,$d_{max}=\cfrac{|-2-8|}{\sqrt{2}}=5\sqrt{2}$;
【问题】为什么不设点P的坐标为$(x,y)$而采用参数坐标形式$(\sqrt{3}cos\theta,sin\theta)$?
前者坐标形式是二元形式,后者是一元形式,故后者简单。
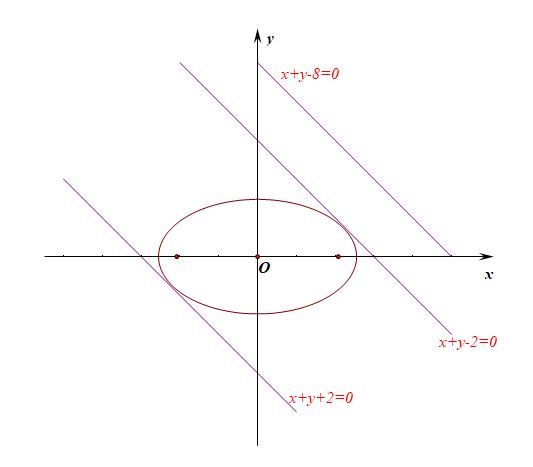 法2、平行线法,设和已知平行且和已知椭圆相切的直线$x+y+m=0$,
法2、平行线法,设和已知平行且和已知椭圆相切的直线$x+y+m=0$,
则由$x+y+m=0$和$\cfrac{x^2}{3}+y^2=1$,消去$y$可得$4x^2+6mx+3m^2-3=0$,
由二者相切可知,$\Delta=36m^2-4\times4(3m^2-3)=0$,解得$m=\pm 2$,
即和椭圆相切的直线有$x+y-2=0$和$x+y+2=0$,故切点到直线$x+y-8=0$的距离就可以用两条平行线间的距离来刻画,
则$d_{max}=\cfrac{|2-(-8)|}{\sqrt{2}}=5\sqrt{2}$,$d_{min}=\cfrac{|-2-(-8)|}{\sqrt{2}}=3\sqrt{2}$。
【反思总结】1、如果将椭圆换成圆,再求圆上的动点到直线的距离的最值,可以考虑的方法有:
其一,圆的参数方程法;其二,平行线法;其三,几何法,圆心到直线的距离加减半径。
例05-2【2017$\cdot$江苏卷】
在平面直角坐标系$xoy$中,已知直线$l$的参数方程是$\begin{cases}x=-8+t\\y=\cfrac{t}{2}\end{cases}(t为参数)$,
曲线$C$的参数方程是$\begin{cases}x=2s^2\\y=2\sqrt{2}s\end{cases}(s为参数)$,设$P$为曲线$C$上的动点,
求点$P$到直线$l$的距离的最小值。
分析:直线$l$的直角坐标方程是$x-2y+8=0$,曲线$C$上的动点$P$的坐标$(2s^2,2\sqrt{2}s)$,
则由点到直线的距离公式可得,
$d=d(s)=\cfrac{|2s^2-4\sqrt{2}s+8|}{\sqrt{1^2+(-2)^2}}$
$=\cfrac{|2(s-\sqrt{2})^2+4|}{\sqrt{5}}$
当$s=\sqrt{2}$时,$d_{min}=\cfrac{4\sqrt{5}}{5}$。
解后反思:
1、利用抛物线的参数方程和点线距公式转化为二次函数的最值问题。
2、本题目还可以利用平行线法来求解。
6、求周长的最值
例06在极坐标系中,曲线$C$的极坐标方程为$\rho^2=\cfrac{3}{1+2sin^2\theta}$和点$R(2\sqrt{2},\cfrac{\pi}{4})$
⑴将曲线$C$的极坐标方程化为直角坐标方程;
⑵设点$P$为曲线$C$上一动点,矩形$PQRS$以$PR$为其对角线,且矩形的一边垂直于极轴,求矩形$PQRS$的周长的最小值及此时点$P$的直角坐标。
分析:⑴将曲线$C$的极坐标方程为$\rho^2=\cfrac{3}{1+2sin^2\theta}$变形为$\rho^2+2(\rho sin\theta)^2=3$,
即$x^2+y^2+2y^2=x^2+3y^2=3$,也就是$\cfrac{x^2}{3}+y^2=1$;
⑵作出大致图像, 课件地址
我们可以作出点$P$的坐标$P(\sqrt{3}cos\theta,sin\theta)$,
那么点$Q(2,sin\theta)$,点$R(2,2)$,则$|PQ|=2-\sqrt{3}cos\theta$,$|RQ|=2-sin\theta$,
则$|PQ|+|RQ|=4-2sin(\theta+\cfrac{\pi}{3})$,
当$\theta=\cfrac{\pi}{6}$时,$(|PQ|+|RQ|)_{min}=2$,所以矩形$PQRS$的周长的最小值为4,
此时点$P$的坐标为$(\sqrt{3}cos\cfrac{\pi}{6},sin\cfrac{\pi}{6})$,即$(\cfrac{3}{2},\cfrac{1}{2})$。
7、求面积的最值
例7【2018宝鸡市二检文理科第22题】在直角坐标系$xoy$中,曲线$C_1$的参数方程为$\begin{cases}x=2+2cos\alpha\\y=2sin\alpha\end{cases}(\alpha为参数)$,
以坐标原点为极点,以$x$轴正半轴为极轴,建立极坐标系,曲线$C_2$的极坐标方程为$\rho=2cos\theta$。
(1)写出曲线$C_1$的普通方程和$C_2$的直角坐标方程;
(2)设点$P$ 在$C_1$上,点$Q$ 在$C_2$上,且$\angle POQ=\cfrac{\pi}{2}$,求三角形$POQ$面积的最大值。
分析:(1) 直接给出答案,
曲线的普通方程$C_1:(x-2)^2+y^2=4$;
所求的直角坐标方程$C_2:(x-1)^2+y^2=1$;
(2)【法1】极坐标法(本题目命题意图就是想让学生体会极坐标的优越性,从而主动使用极坐标刻画思考或者在极坐标系下运算),
曲线$C_1$的极坐标方程为$\rho_1=4cos\alpha(\alpha\in(-\cfrac{\pi}{2},\cfrac{\pi}{2}))$,
曲线$C_2$的极坐标方程为$\rho_2=2cos\theta(\theta\in(-\cfrac{\pi}{2},\cfrac{\pi}{2}))$,
 如右图所示,初步分析,当点$P$在$x$轴上方时,点$Q$必在$x$轴下方;
如右图所示,初步分析,当点$P$在$x$轴上方时,点$Q$必在$x$轴下方;
当然还会有另一种情形,当点$P$在$x$轴下方时,点$Q$必在$x$轴上方;
我们取其中一种做研究,比如点$P$在$x$轴上方,点$Q$在$x$轴下方;
注意此时点$Q$的极角是负值$-\theta$,
由于$\rho_1>0$,$\rho_2>0$,以及$\angle POQ=\cfrac{\pi}{2}$可得,
$\alpha-\theta=\cfrac{\pi}{2}$,即$\alpha=\theta+\cfrac{\pi}{2}$,(顺时针为正,逆时针为负)
则有$S_{\Delta OPQ}=\cfrac{1}{2}|OP||OQ|$
$=\cfrac{1}{2}\rho_1\rho_2=\cfrac{1}{2}\times 4cos\alpha\times 2cos\theta$
$=4cos(\theta+\cfrac{\pi}{2})cos\theta=-4sin\theta cos\theta$
$=-2sin2\theta$,
当$2\theta=-\cfrac{\pi}{2}$,即$\theta=-\cfrac{\pi}{4}$时,
$(S_{\Delta OPQ})_{max}=2$。
【法2】参数方程法,
 如图所示,曲线$C_1$的参数方程是$\begin{cases}x=2+2cos\alpha\\y=2sin\alpha\end{cases}(\alpha为参数,\alpha\in (-\pi,\pi))$,
如图所示,曲线$C_1$的参数方程是$\begin{cases}x=2+2cos\alpha\\y=2sin\alpha\end{cases}(\alpha为参数,\alpha\in (-\pi,\pi))$,
曲线$C_2$的参数方程是$\begin{cases}x=1+cos\theta\\y=sin\theta\end{cases}(\theta为参数,\theta\in (-\pi,\pi))$,
注意参数的含义,$\cfrac{\alpha}{2}-\cfrac{\theta}{2}=\cfrac{\pi}{2}$,即$\alpha=\pi+\theta$
则有$S_{\Delta OPQ}=\cfrac{1}{2}|OP||OQ|$
$=\cfrac{1}{2}\sqrt{(2+2cos\alpha)^2+(2sin\alpha)^2}\sqrt{(1+cos\theta)^2+sin^2\theta}$
$=\cfrac{1}{2}\sqrt{8(1+cos\alpha)}\sqrt{2(1+cos\theta)}$
$=\cfrac{1}{2}\sqrt{8(1-cos\theta)}\sqrt{2(1+cos\theta)}$
$=\cfrac{1}{2}\times 4\sqrt{(1-cos\theta)(1+cos\theta)}$
$=2\sqrt{1-cos^2\theta}=2|sin\theta|$
当$\theta=-\cfrac{\pi}{2}$时,$(S_{\Delta OPQ})_{max}=2$。
【变形方法3】参数方程法,曲线$C_1$的参数方程是$\begin{cases}x=2+2cos\alpha\\y=2sin\alpha\end{cases}(\alpha为参数,\alpha\in (-\pi,\pi))$,
曲线$C_2$的参数方程是$\begin{cases}x=1+cos\theta\\y=2sin\theta\end{cases}(\theta为参数,\theta\in (-\pi,\pi))$,
注意参数的含义,$\cfrac{\alpha}{2}-\cfrac{\theta}{2}=\cfrac{\pi}{2}$,即$\alpha=\pi+\theta$
由$\angle POQ=\cfrac{\pi}{2}$可知,$k_{OP}k_{OQ}=-1$,
即$\cfrac{2sin\alpha}{2+2cos\alpha}\times \cfrac{sin\theta}{1+cos\theta}=-1$,即$-sin\alpha sin\theta=(1+cos\alpha)(1+cos\theta)$
$S_{\Delta OPQ}=\cfrac{1}{2}|OP||OQ|$
$=\cfrac{1}{2}\sqrt{(2+2cos\alpha)^2+(2sin\alpha)^2}\sqrt{(1+cos\theta)^2+sin^2\theta}$
$=\cfrac{1}{2}\sqrt{8(1+cos\alpha)}\sqrt{2(1+cos\theta)}$
$=2\sqrt{(1+cos\alpha)(1+cos\theta)}$
$=2\sqrt{-sin\alpha sin\theta}$,
又有$\cfrac{\alpha}{2}-\cfrac{\theta}{2}=\cfrac{\pi}{2}$,即$\alpha=\pi+\theta$
$原式=2\sqrt{sin^2\theta}=2|sin\theta|$,
当$\theta=-\cfrac{\pi}{2}$时,$(S_{\Delta OPQ})_{max}=2$。
【法4】尝试使用均值不等式,待有空思考整理。
设直线$OP$的方程为$y=kx$,由$\angle POQ=\cfrac{\pi}{2}$可得,
直线$OQ$的方程为$y=-\cfrac{1}{k}x$,
联立$\begin{cases}(x-2)^2+y^2=4\\y=kx\end{cases}$,
解得$P(\cfrac{4}{1+k^2},\cfrac{4k}{1+k^2} )$,
联立$\begin{cases}(x-1)^2+y^2=1\\y=-\cfrac{1}{k}x\end{cases}$,
解得$ Q(\cfrac{2k^2}{1+k^2},\cfrac{-2k}{1+k^2} )$,
$S_{\Delta POQ}=\cfrac{1}{2}|OP||OQ|=\cfrac{1}{2}\sqrt{(\cfrac{4}{1+k^2})^2+(\cfrac{4k}{1+k^2})^2}\sqrt{(\cfrac{2k^2}{1+k^2})^2+(\cfrac{-2k}{1+k^2})^2}$
$=\cfrac{1}{2}\sqrt{\cfrac{16}{1+k^2}}\sqrt{\cfrac{4k^2}{1+k^2}}=\cfrac{4|k|}{1+k^2}=\cfrac{4}{|k|+\frac{1}{|k|}}\leq 2$。
当且仅当$|k|=1$时取到等号。故$(S_{\Delta POQ})_{max}=2$。
反思:这个解法的优越性体现在只有一个变量$k$,那么求最值时就好操作些。
【法5】是否有,待后思考整理。
解后反思:
1、在高中数学中,求某个量(比如面积)的最值时,往往需要先表达出这个量(比如面积)的函数,这样求实际问题的最值就变成了求这个函数模型的最值问题了,这一过程实际就是函数的建模。
1、法1利用极坐标法,这样表达刻画面积时,就只有两个变量$\alpha$和$\theta$,然后利用两个变量的相互关系,再将变量集中为一个变量,就好求解其最大值了。
2、法2利用参数方程法,在表达刻画面积时,同样只有两个变量$\alpha$和$\theta$,然后利用两个变量的相互关系,再将变量集中为一个变量,就好求解其最大值了。法2和法3本质接近。
3、正确求解本题目,需要深刻理解极坐标方程的含义和参数方程的含义,尤其是法2对参数的含义更不能弄错了。用到了内外角关系和圆心角和圆周角关系。
4、还有学生想到设$P(x_1,y_1)$,$ Q(x_2,y_2)$,这样的思路我没有做尝试,不过能看出来此时是四个变量,这样就难得多了,所以碰到这样的题目我们先需要初步筛选思路。
8、求斜率或参数的值或取值范围
例08【2016全国卷Ⅱ第23题高考真题】在直角坐标系$xOy$中,圆$C$ 的方程为$(x+6)^2+y^2=25$.
(1)以坐标原点为极点,$x$轴的正半轴为极轴建立极坐标系,求$C$的极坐标方程。
分析:由于极坐标方程中只有$\rho$和$\theta$,
故只要将$x=\rho\cdot cos\theta$和$y=\rho\cdot sin\theta$代入圆$C$的直角坐标方程为$(x+6)^2+y^2=25$,
整理可得$\rho^2+12\rho cos\theta+11=0$。
(2)直线$l$的参数方程为$\begin{cases} x=t\cdot cos\alpha \\ y=t\cdot sin\alpha \end{cases}(t为参数)$,
$l$与$C$交于A、B两点,$|AB|=\sqrt{10}$,求直线$l$的斜率。
【法1】参数方程法,
分析:本题目的求解要用到直线的参数方程的几何意义。
将直线$l$的参数方程代入圆$C$的直角坐标方程,
化简整理为$t^2+12t cos\alpha+11=0$,可设点$A、B$分别对应参数$t_1,t_2$,
则$\begin{cases} t_1+ t_2=-12cos\alpha \\ t_1\times t_2=11\end{cases}$,
$|AB|=|t_1-t_2|= \sqrt{(t_1+t_2)^2-4t_1t_2}=\sqrt{10}$,
解得$cos^2\alpha=\cfrac{54}{144}=\cfrac{3}{8}$,
又由图可知$\alpha\in [0,\pi)$,故$cos\alpha=\pm\cfrac{\sqrt{6}}{4}$,
则有$sin\alpha=\cfrac{\sqrt{10}}{4}$
故$tan\alpha=\cfrac{sin\alpha}{cos\alpha}=\cfrac{\cfrac{\sqrt{10}}{4} }{\pm\cfrac{\sqrt{6}}{4}} =\pm\cfrac{\sqrt{15}}{3}$。
故直线$l$的斜率为$\pm\cfrac{\sqrt{15}}{3}$。
【法2】极坐标系法,
圆$C$的极坐标方程是$\rho^2+12\rho cos\theta+11=0$。
将直线的参数方程两式相除得到,$y=tan\alpha x$,即$y=kx$,
则直线的极坐标方程为$\theta=\alpha(\rho\in R)$
将直线的极坐标方程代入圆$C$的极坐标方程是$\rho^2+12\rho cos\theta+11=0$,
得到圆$C$的极坐标方程是$\rho^2+12\rho cos\alpha+11=0$,
设点$A$的极坐标方程为$(\rho_1,\alpha)$,点$B$的极坐标方程为$(\rho_2,\alpha)$,
则$\rho_1+\rho_2=-12cos\alpha$,$\rho_1\cdot \rho_2=11$,
由$|AB|=|\rho_1-\rho_2|= \sqrt{(\rho_1+\rho_2)^2-4\rho_1\rho_2}=\sqrt{10}$,
解得$cos^2\alpha=\cfrac{54}{144}=\cfrac{3}{8}$,
又由图可知$\alpha\in [0,\pi)$,故$cos\alpha=\pm\cfrac{\sqrt{6}}{4}$,
则有$sin\alpha=\cfrac{\sqrt{10}}{4}$
故$tan\alpha=\cfrac{sin\alpha}{cos\alpha}=\cfrac{\cfrac{\sqrt{10}}{4} }{\pm\cfrac{\sqrt{6}}{4}} =\pm\cfrac{\sqrt{15}}{3}$。
故直线$l$的斜率为$\pm\cfrac{\sqrt{15}}{3}$。
【法3】平面几何法,
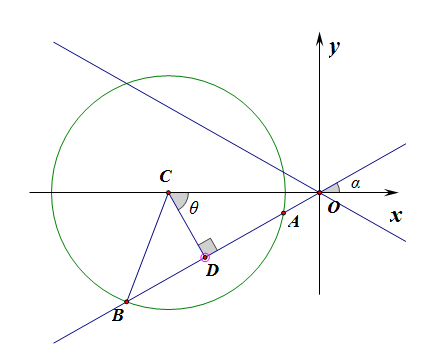 如图所示,这样的直线应该有两条,且其斜率互为相反数,
如图所示,这样的直线应该有两条,且其斜率互为相反数,
现重点求解图中的直线$AB$的斜率,
在$Rt\Delta BCD$中,半径为$BC=5$,半弦长为$BD=\cfrac{\sqrt{10}}{2}$,
利用勾股定理求得,弦心距$CD=\cfrac{3\sqrt{10}}{2}$
在$Rt\Delta OCD$中,$OC=6$,$CD=\cfrac{3\sqrt{10}}{2}$
求得$cos\angle OCD=cos\theta=\cfrac{\sqrt{10}}{4}$
从而$sin\alpha=\cfrac{\sqrt{10}}{4}$,$cos\alpha=\cfrac{\sqrt{6}}{4}$,
即$k=tan\alpha=\cfrac{\sqrt{10}}{\sqrt{6}}=\cfrac{\sqrt{15}}{3}$,
故满足条件的直线$AB$有两条,其斜率为$\pm\cfrac{\sqrt{15}}{3}$。
例09【2017全国卷1,文科第22题高考真题】
在直角坐标系$xOy$中,曲线$C$ 的参数方程为$\begin{cases}x=3cos\theta\\y=sin\theta\end{cases}(\theta为参数)$,
直线$l$参数方程为$\begin{cases}x=a+4t\\y=1-t\end{cases}(t为参数)$,
(1)若$a=-1$,求$C$与$l$的交点坐标。
分析:将曲线$C$的参数方程转化为直角坐标方程为$\cfrac{x^2}{9}+y^2=1①$;
当$a=-1$时,将直线消掉参数得到$x+4y=3②$,
两式联立,解方程组得到 $\begin{cases}x=3\\y=0\end{cases}$
或$\begin{cases}x=-\cfrac{21}{25}\\y=\cfrac{24}{25}\end{cases}$,
故交点坐标为$(3,0)或(-\cfrac{21}{25},\cfrac{24}{25})$。
(2)若$C$上的点到$l$的距离的最大值为$\sqrt{17}$,求$a$.
分析:曲线$C$上的任意一点$P(3cos\theta,sin\theta)$,
将直线$l$消掉参数得到$x+4y-4-a=0$,
则点P的直线$l$的距离为
$d=\cfrac{|3cos\theta+4sin\theta-4-a|}{\sqrt{17}}$
$=\cfrac{|5sin(\theta+\phi)-(4+a)|}{\sqrt{17}}(tan\phi=\cfrac{3}{4})$;
当$4+a\ge 0$时,即$a\ge -4$时,取$sin(\theta+\phi)=-1$,
$d_{max}=\cfrac{|-5-a-4|}{\sqrt{17}}=\cfrac{9+a}{\sqrt{17}}=\sqrt{17}$,解得$a=8$;
当$4+a< 0$时,即$a< -4$时,取$sin(\theta+\phi)=1$,
$d_{max}=\cfrac{|5-a-4|}{\sqrt{17}}=\cfrac{1-a}{\sqrt{17}}=\sqrt{17}$,解得$a=-16$。
综上所述,$a$的值为$8或-16$。
9、求轨迹方程(相关点法)
例10【求轨迹方程】在直角坐标系$xoy$中,以坐标原点为极点,$x$轴正半轴为极轴建立极坐标系,直线$l_1$的参数方程为$\begin{cases}x=t\\y=at\end{cases}(t为参数)$,
曲线$C_1$的方程为$\rho(\rho-4sin\theta)=12$,定点$A(6,0)$,点$P$是$C_1$上的动点,$Q$为$AP$的中点,
(1)、求点$Q$的轨迹$C_2$的直角坐标方程;
(2)、直线$l$与曲线$C_2$交于$A、B$两点,若$|AB|\ge 2\sqrt{3}$,求实数$a$的取值范围;
分析:(1)【法1】:将曲线$C_1$的极坐标方程化为直角坐标方程为$x^2+y^2-4y=12$,
设点$P(x',y')$,点$Q(x,y)$,由$Q$为$AP$的中点,
得到$\begin{cases}x'=2x-6\\y'=2y\end{cases}$,
代入$x^2+y^2-4y=12$,(此方法叫相关点法)
得到点$Q$的轨迹$C_2$的直角坐标方程为$(x-3)^2+(y-1)^2=4$;
【法2】:参数方程法,将曲线$C_1$的直角坐标方程为$x^2+y^2-4y=12$,即$x^2+(y-2)^2=16$
化为参数方程得到$\begin{cases}x=4cos\theta\\y=2+4sin\theta\end{cases}(\theta为参数)$,定点$A(6,0)$,
则其中点$Q(2cos\theta+3,1+2sin\theta)$,
即点$Q$的参数方程为$\begin{cases}x=2cos\theta+3\\y=1+2sin\theta\end{cases}(\theta为参数)$,
消去参数得到,点$Q$的轨迹$C_2$的直角坐标方程为$(x-3)^2+(y-1)^2=4$;
(2)、遇到直线和圆的位置关系问题,我们常常想到弦长半径和弦心距的$Rt\Delta$;
由题可知,直线$l$的直角坐标方程为$y=ax$,由$|AB|\ge 2\sqrt{3}$,
可得圆心$(3,1)$到直线$y=ax$的点线距$d=\sqrt{2^2-(\cfrac{2\sqrt{3}}{2})^2}\leq 1$,
即$d=\cfrac{|3a-1|}{\sqrt{a^2+1}}\leq 1$,平方得到
$(3a-1)^2\leq (a^2+1)$,解得$0\leq a\leq \cfrac{3}{4}$;
故实数$a$的取值范围为$[0, \cfrac{3}{4}]$;
例11【求轨迹方程】已知圆$C:x^2+y^2=4$,直线$l:x+y=2$,以坐标原点为极点,$x$轴正半轴为极轴建立极坐标系, (1)、将圆$C$和直线$l$的方程化为极坐标方程; 简析:$C:\rho=2$;$l:\rho(cos\theta+sin\theta)=2$ (2)、点$P$是直线$l$上的点,射线$OP$交圆$C$于点$R$,又点$Q$在$OP$上 且满足$|OQ|\cdot|OP|=|OR|^2$,当点$P$在直线$l$上移动时,求点$Q$的轨迹的极坐标方程;
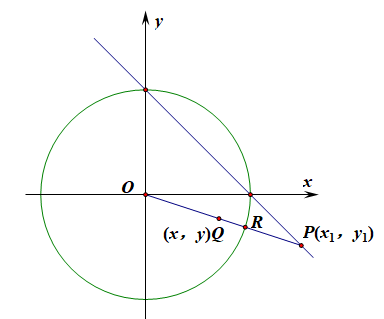 【思路一】:碰到这样的问题,我们一般是想着在直角坐标系下进行相应的运算,然后将结果转化成极坐标系即可, 设点$P(x_1,y_1)$,点$Q(x,y)$, 这样由$|OQ|\cdot|OP|=|OR|^2$,$|OR|=2$,变形得到$\sqrt{x^2+y^2}\cdot \sqrt{x_1^2+y_1^2}=4①$, 为得到关于点$Q$的轨迹方程,需要转化去掉方程中的变量$x_1$和$y_1$, 为此我们注意到$\cfrac{x_1}{x}=\cfrac{y_1}{y}=t>0$,则 $x_1=t\cdot x$,$y_1=t\cdot y$, 代入方程①得到,$\sqrt{x^2+y^2}\cdot \sqrt{t^2x^2+t^2y^2}=4$, 即$(x^2+y^2)\sqrt{t^2}=(x^2+y^2)\cdot t=4②$ 这样就多出来了一个变量$t$,只要将他想办法去掉就可以了, 又由于$x_1+y_1=2$,即$tx+ty=2$, 这样$t=\cfrac{2}{x+y}$, 代入方程②得到,$(x^2+y^2)\cdot\cfrac{2}{x+y}=4$; 即点$Q$的轨迹方程的直角坐标方程为$x^2+y^2=2(x+y)$, 即点$Q$的轨迹方程为$\rho=2(sin\theta+cos\theta)$。 【思路二】:极坐标系法,设点$P(\rho_1,\theta)$,点$Q(\rho,\theta)$,点$R(\rho_0,\theta)$, 则有$\rho_0=2$,且$\rho_1(cos\theta+sin\theta)=2$, 则由$|OQ|\cdot|OP|=|OR|^2$,$|OR|=2$,得到$\rho\cdot \rho_1=4$, 即$\rho\cdot \cfrac{2}{cos\theta+sin\theta}=4$, 整理得到,$\rho=2(sin\theta+cos\theta)$, 即点$Q$的轨迹方程为$\rho=2(sin\theta+cos\theta)$。 解后反思: 1、通过两种思路的比较,我们基本能体会到极坐标系是有其自身的优越性的, 法1一开始是四个变量,法2一开始就只有三个变量$\rho,\rho_1,\theta$, 当将$\rho_1$做代换之后,立马就变成了两个变量,结果也就出来了。 2、由此题目我们还可以延伸思考,若给定条件是$\cfrac{|OQ|}{|OP|}=4$,或者$|OQ|\pm|OP|=4$, 那么用极坐标法都是比较简单的。
【思路一】:碰到这样的问题,我们一般是想着在直角坐标系下进行相应的运算,然后将结果转化成极坐标系即可, 设点$P(x_1,y_1)$,点$Q(x,y)$, 这样由$|OQ|\cdot|OP|=|OR|^2$,$|OR|=2$,变形得到$\sqrt{x^2+y^2}\cdot \sqrt{x_1^2+y_1^2}=4①$, 为得到关于点$Q$的轨迹方程,需要转化去掉方程中的变量$x_1$和$y_1$, 为此我们注意到$\cfrac{x_1}{x}=\cfrac{y_1}{y}=t>0$,则 $x_1=t\cdot x$,$y_1=t\cdot y$, 代入方程①得到,$\sqrt{x^2+y^2}\cdot \sqrt{t^2x^2+t^2y^2}=4$, 即$(x^2+y^2)\sqrt{t^2}=(x^2+y^2)\cdot t=4②$ 这样就多出来了一个变量$t$,只要将他想办法去掉就可以了, 又由于$x_1+y_1=2$,即$tx+ty=2$, 这样$t=\cfrac{2}{x+y}$, 代入方程②得到,$(x^2+y^2)\cdot\cfrac{2}{x+y}=4$; 即点$Q$的轨迹方程的直角坐标方程为$x^2+y^2=2(x+y)$, 即点$Q$的轨迹方程为$\rho=2(sin\theta+cos\theta)$。 【思路二】:极坐标系法,设点$P(\rho_1,\theta)$,点$Q(\rho,\theta)$,点$R(\rho_0,\theta)$, 则有$\rho_0=2$,且$\rho_1(cos\theta+sin\theta)=2$, 则由$|OQ|\cdot|OP|=|OR|^2$,$|OR|=2$,得到$\rho\cdot \rho_1=4$, 即$\rho\cdot \cfrac{2}{cos\theta+sin\theta}=4$, 整理得到,$\rho=2(sin\theta+cos\theta)$, 即点$Q$的轨迹方程为$\rho=2(sin\theta+cos\theta)$。 解后反思: 1、通过两种思路的比较,我们基本能体会到极坐标系是有其自身的优越性的, 法1一开始是四个变量,法2一开始就只有三个变量$\rho,\rho_1,\theta$, 当将$\rho_1$做代换之后,立马就变成了两个变量,结果也就出来了。 2、由此题目我们还可以延伸思考,若给定条件是$\cfrac{|OQ|}{|OP|}=4$,或者$|OQ|\pm|OP|=4$, 那么用极坐标法都是比较简单的。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









