






 坐热板凳组在6月14日召开了第一次会议,确定了个人记账本微信小程序的项目方向和目标功能,进行了任务分工。团队正在学习软件测试基础技术和Scrum迭代式增量软件开发过程,面对Maven操作不熟练和内部沟通挑战,团队成员正积极应对。
坐热板凳组在6月14日召开了第一次会议,确定了个人记账本微信小程序的项目方向和目标功能,进行了任务分工。团队正在学习软件测试基础技术和Scrum迭代式增量软件开发过程,面对Maven操作不熟练和内部沟通挑战,团队成员正积极应对。
《坐热板凳》第八次团队作业:Alpha冲刺
| 项目 | 内容 |
|---|---|
| 这个作业属于哪个课程 | http://www.cnblogs.com/nwnu-daizh/ |
| 这个作业的要求在哪里 | https://www.cnblogs.com/nwnu-daizh/p/11012922.html |
| 团队名称 | 坐热板凳组 |
| 作业学习目标 | ①掌握软件测试基础技术。②学习迭代式增量软件开发过程(Scrum) |
| 团队博客地址 | https://www.cnblogs.com/happiers// |
| 项目名称 | 个人记账本(微信小程序) |
任务一 前言:
第1次会议在6月14日在教七306召开。
主要确定了项目方向和目标功能,进行了任务分工,时长80min。
任务二 团队项目 github地址:
github地址: https://github.com/jessiyx/sethotchair
任务三 燃尽图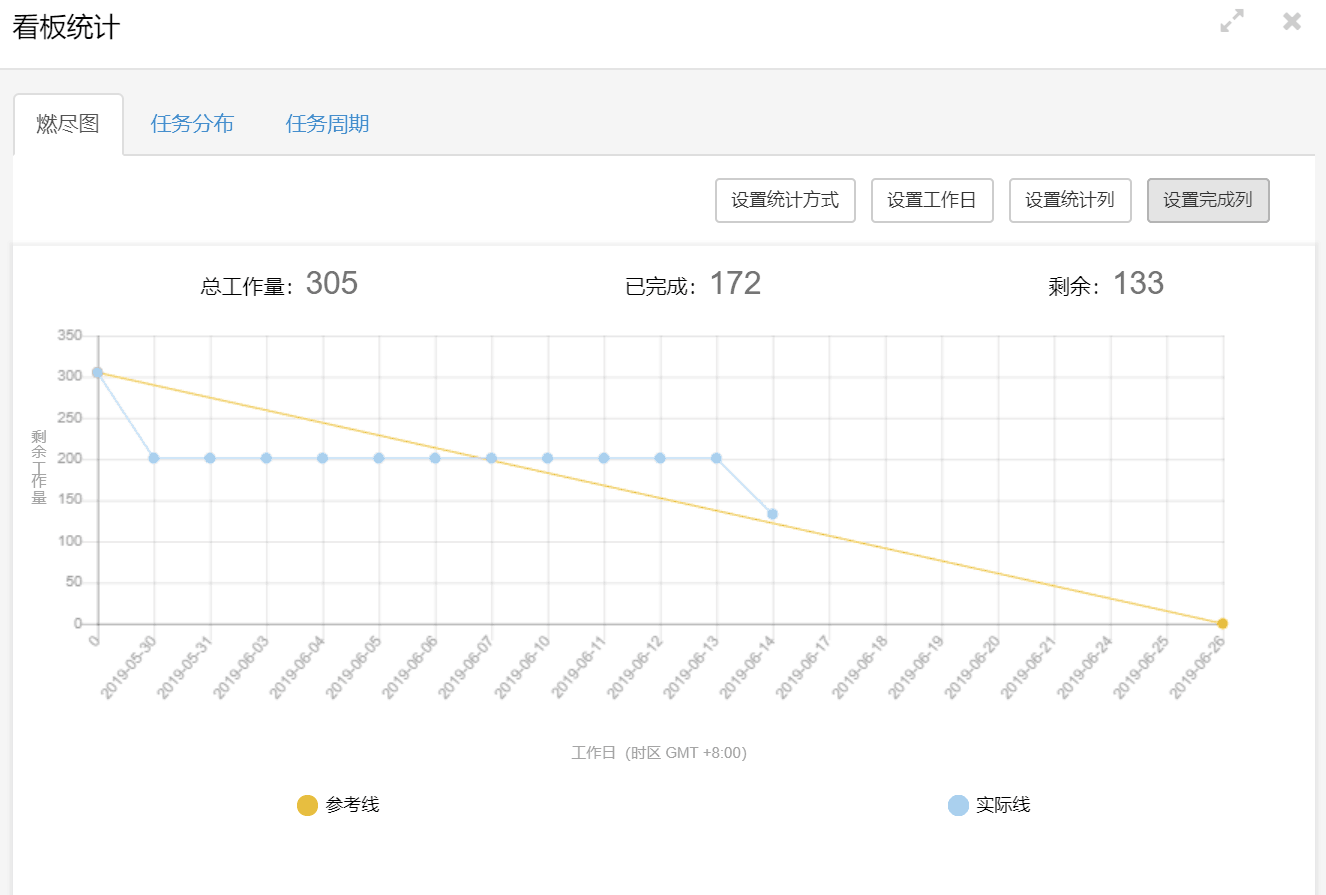
任务四 站立会议照片
任务五 具体分工
| 项目成员 | 具体任务 |
|---|---|
| 朱艺璇 | 负责给组员分配任务,汇总scurm meeting;组织协调任务进度 |
| 王潇 | 主要负责项目开发,学习相关内容 |
| 达星斗 | 编写博客,整理第一次会议内容 |
| 刘振华 | 协助完成开发,保证项目的顺利进行 |
任务六 遇到的困难
(1).不太熟练Maven的操作,导致项目进程有点滞后。
(2).组员之间意见发生分歧,需要进行更好的沟通。

















 590
590

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









