






 本文深入探讨了四轴飞行器simple功能的实现原理,包括坐标旋转、控制输出调整等关键步骤,以及如何确保在不同初始方向下的正确使用。详细解释了如何通过旋转delta角度来调整遥控输入,使四轴飞行器始终保持初始化时的滚转和俯仰动作方向,同时强调了机架初始方向调整的重要性。
本文深入探讨了四轴飞行器simple功能的实现原理,包括坐标旋转、控制输出调整等关键步骤,以及如何确保在不同初始方向下的正确使用。详细解释了如何通过旋转delta角度来调整遥控输入,使四轴飞行器始终保持初始化时的滚转和俯仰动作方向,同时强调了机架初始方向调整的重要性。
在分析simple功能先,先复习下二维空间坐轴或向量的旋转,摘自WIKI。
在讨论旋转的时候理解参照系是重要的。从一个观点,你可以保持坐标轴固定旋转向量从另一个观点,你可以保持向量固定旋转坐标系。
在第一种观点看来,坐标或向量关于原点的逆时针旋转;或者从第二种观点看来,平面或轴关于原点的顺时针旋转。这里的 (x,y) 被旋转了 θ 并希望知道旋转后的坐标 (x',y'):
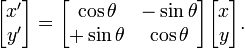
或


平面或轴关于原点的逆时针旋转,在新平面中的坐标将顺时针旋转到新坐标。在这种情况下,如果在旧平面中的坐标是 (x,y),同一个向量在新平面中的坐标是 (x',y'),则:
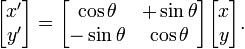
或


向量 (x, y) 的大小同于向量 (x′, y′) 的大小。
ACM中simple功能的实现代码:
1 //read_radio();
2 if(do_simple && new_radio_frame){
3 new_radio_frame = false;
4 simple_timer++;
5 //算出当前航向和初始航向之向的夹角
6 //机体顺时钟旋转delta>0,逆时钟旋转delta<0。决定于载机坐标系的编排。
7 int delta = wrap_360(dcm.yaw_sensor - initial_simple_bearing)/100;
8 //分解成roll pitch的独立动作,大概是为了简化运算
9 //不这样分解时,会是什么情况呢???
10 if (simple_timer == 1){
11 // roll
12 simple_cos_x = sin(radians(90 - delta));
14 }else if (simple_timer > 2){
15 // pitch
16 simple_sin_y = cos(radians(90 - delta));
17 simple_timer = 0;
18 }
19 //由于上面算夹角的关系,由机体当前坐标系要逆时钟旋转delta,得到
20 //初始的机体坐标系。所以这里采用逆时钟旋转的旋转向量。
21 // Rotate input by the initial bearing
22 control_roll = g.rc_1.control_in * simple_cos_x + g.rc_2.control_in * simple_sin_y;
23 control_pitch = -g.rc_1.control_in * simple_sin_y + g.rc_2.control_in * simple_cos_x;
24
25 //更新上面算出的roll pitch为控制输出量
26 g.rc_1.control_in = control_roll;
27 g.rc_2.control_in = control_pitch;
28 }
由上面的代码可以看出,simple功能是把遥控的roll pitch的控制量旋转delta后,得到在初始航向对应的坐标系中对应的roll pitch控制量。实际运行的效果就是,不管当前机头向何处,打副翼和俯仰杆时,四轴的滚转和俯仰动作都是保持初始化时的滚转和俯仰动作方向。只要操作者的方向未改变,则永远相当于是对尾控制。
有一点要注意的是,当机架初始方向不是正北的话,要注意在航向稳定后,再解锁。飞控会在解锁时,重新记录当前的航向。不然飞控记录的初始航向和机架当前方向不一致,simple功能用起来肯定就会让你觉得怪怪的。
至于能不能不分解成roll pitch的独立动作,则需要改代码后验证,有空试试看是什么效果。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









