






 本文详细介绍如何在ROS环境中安装TurtleBot3机器人功能包,并进行仿真操作。包括安装依赖软件包、功能包,以及如何加载三维模型进行仿真,控制机器人运动,并添加里程计信息。
本文详细介绍如何在ROS环境中安装TurtleBot3机器人功能包,并进行仿真操作。包括安装依赖软件包、功能包,以及如何加载三维模型进行仿真,控制机器人运动,并添加里程计信息。
前言:Rviz是ROS自带的一种3D可视化工具。
一、安装turtlebot3功能包
1.1 安装依赖包
sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation
1.2 安装功能包
cd ~/catkin_ws/src/ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git cd ~/catkin_ws && catkin_make
二、仿真并查看
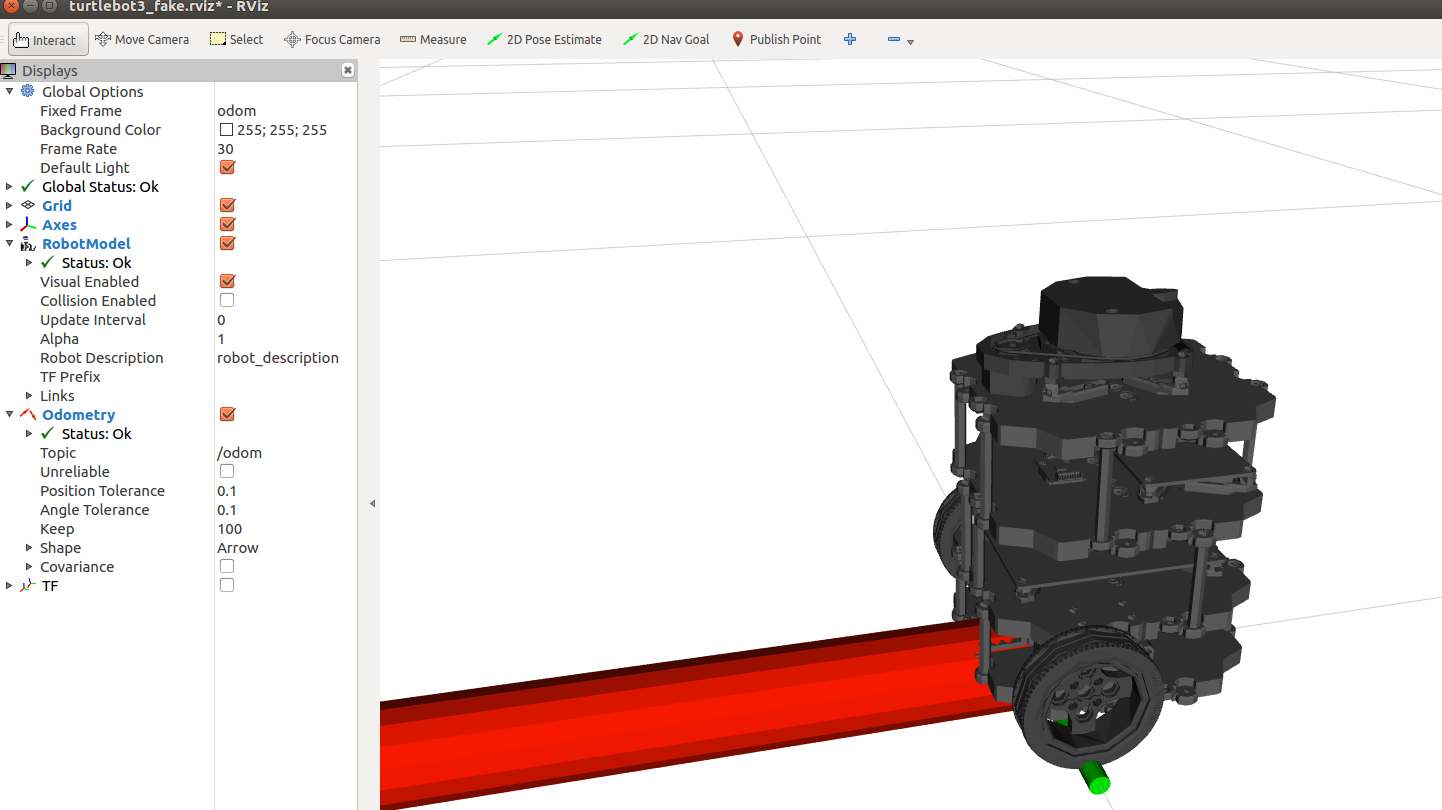
2.1 加载三维模型
cd /home/cdq/catkin_ws/src/turtlebot3_simulations/turtlebot3_fake/launch
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_fake.launch
----------------------------------------
解析:
第二条是设置环境变量。
第三条运行了tur tlebot3_fake_node节点(三维模型)和robot_state_publisher节点(发布车轮信息)。
显示如下:
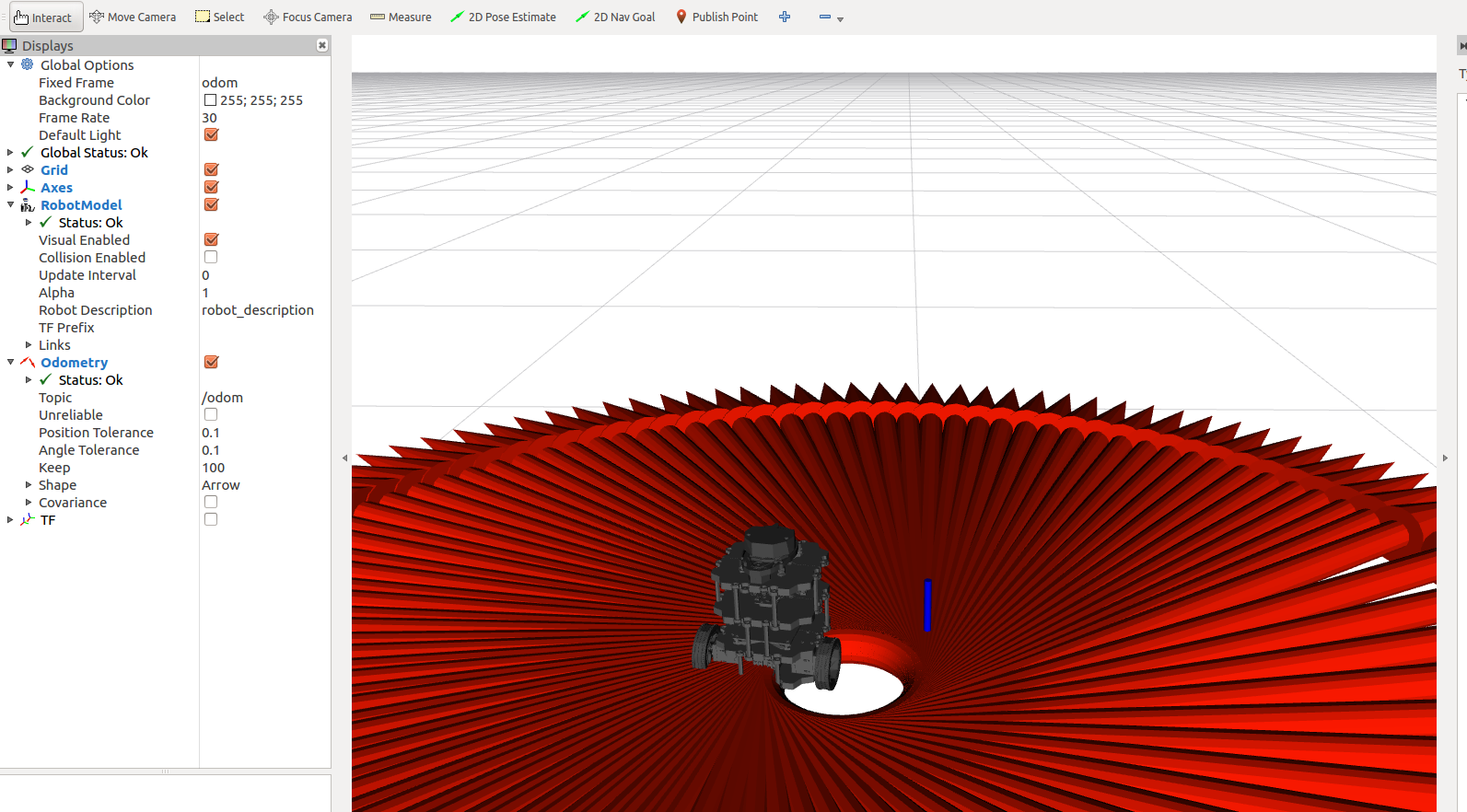
2.2 开启控制命令
启用命令后可以用wasd控制方向。
cd ~/catkin_ws/src/turtlebot3/turtlebot3_teleop/launch export TURTLEBOT3_MODEL=burger roslaunch turtlebot3_teleop_key.launch
----------------------------------
命令解析:
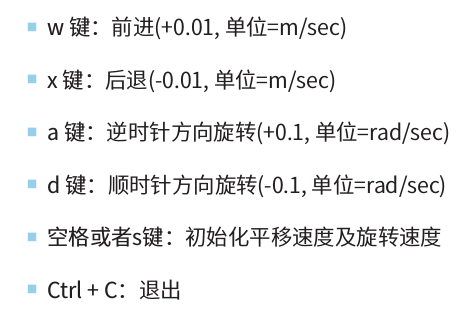
显示如下:
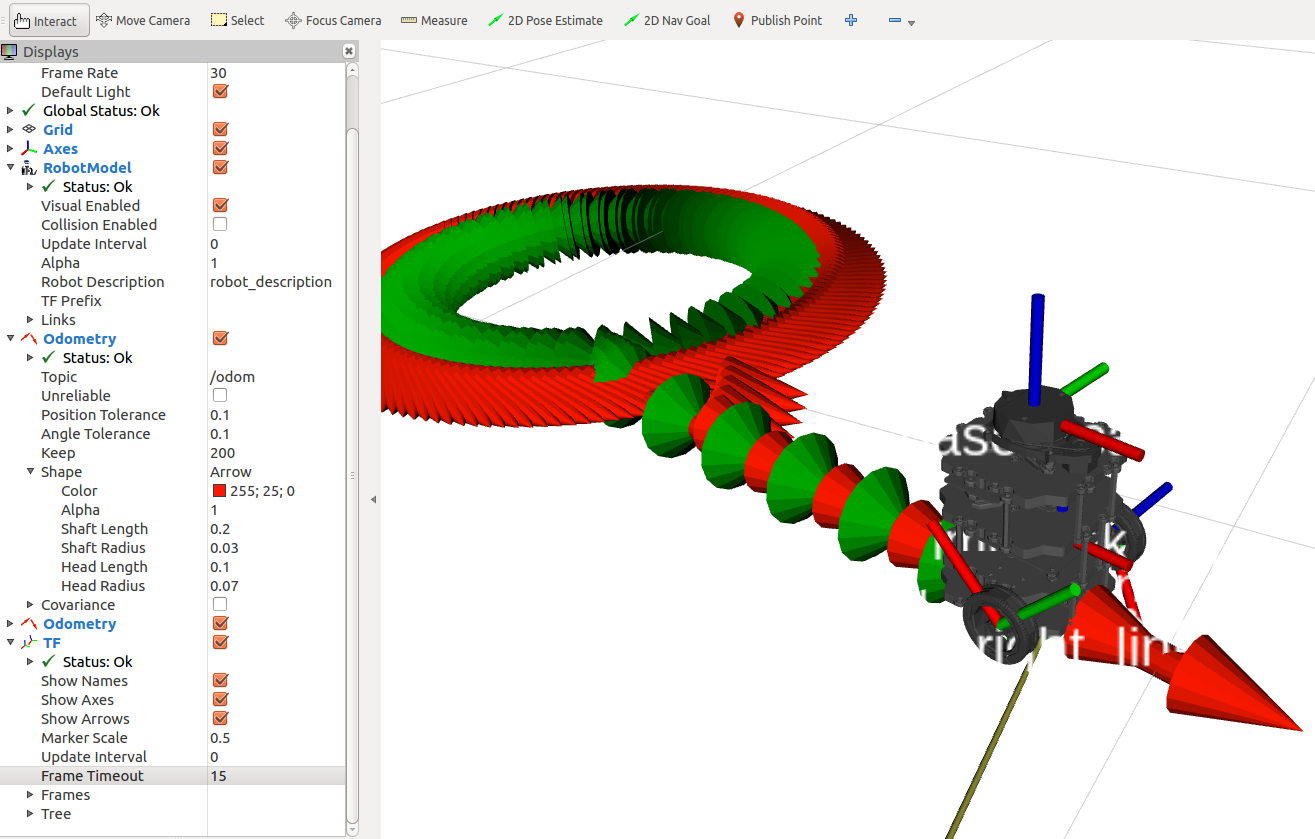
2.3 添加里程计信息
ADD->By Topic->Odometry
初始箭头很大,按图调整一下:

ADD->TF
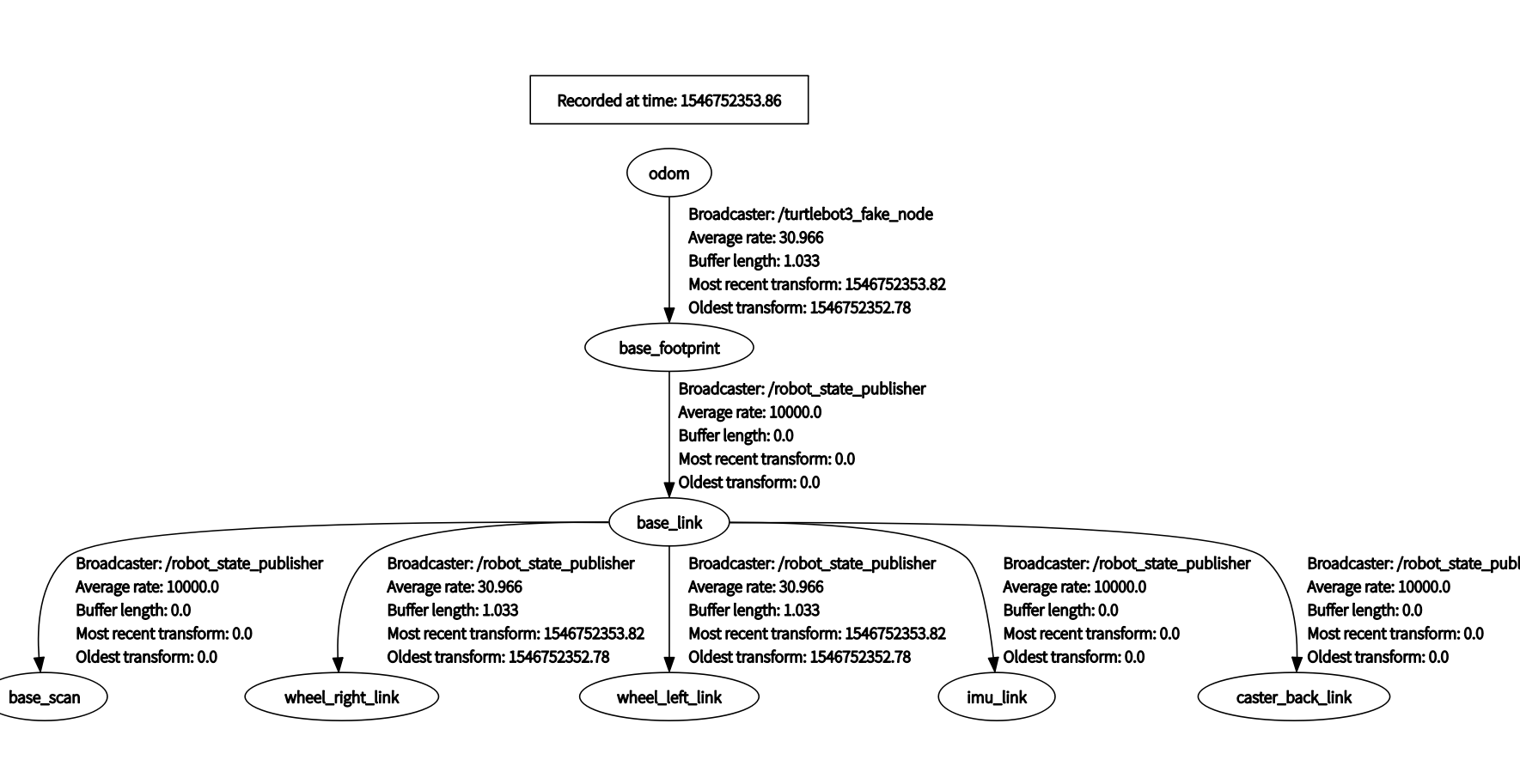
通过rqt_tf_tree查看tf话题
rosrun rqt_tf_tree rqt_tf_tree
-------------------------------------------
显示如下:
-END-

















 758
758

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









