






前言:监听第一只海龟的位置,然后让第二只海龟跟随第一只海龟。
通过监听tf,我们可以避免繁琐的旋转矩阵的计算,而直接获取我们需要的相关信息。
一、新建cpp文件
新建turtle_tf_listener.cpp文件,内容如下:
#include <ros/ros.h> #include <tf/transform_listener.h>//监听类TransformListener 的头文件,该对象会自动订阅ROS中的tf消息,并且管理所有的变换关系数据。 #include <geometry_msgs/Twist.h> #include <turtlesim/Spawn.h> int main(int argc, char** argv){ ros::init(argc, argv, "my_tf_listener"); ros::NodeHandle node; //生成一只新乌龟 ros::service::waitForService("spawn"); ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("spawn"); turtlesim::Spawn srv; add_turtle.call(srv); ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("turtle2/cmd_vel", 10);//定义发布者turtle_vel tf::TransformListener listener;//新建监听对象 ros::Rate rate(10.0); while (node.ok()){ tf::StampedTransform transform;//定义存放转换信息(平动,转动)的变量 try{ listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);//可以获得两个坐标系之间转换的关系,包括旋转与平移。转换得出的坐标是在“/turtle2”坐标系下的 } catch (tf::TransformException &ex) { ROS_ERROR("%s",ex.what()); ros::Duration(1.0).sleep(); continue; }//由于tf的会把监听的内容存放到一个缓存中,然后再读取相关的内容,而这个过程可能会有几毫秒的延迟,也就是,tf的监听器并不能监听到“现在”的变换,所以如果不使用try,catch函数会卡死。 //这个转换基于turtle1的距离和角度,用来计算turtle2的新的线速度和角速度,新的速度被发布在"turtle2/cmd_vel" 话题上,并且sim将使用它来更新turtle2的移动 geometry_msgs::Twist vel_msg; vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(), transform.getOrigin().x()); vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) + pow(transform.getOrigin().y(), 2)); turtle_vel.publish(vel_msg);//发布话题,控制turtle2的位置。 rate.sleep(); } return 0; };
总体思路是:新建监听对象listener,并将turtle1的位置信息转化成vel_msg信息,然后使用发布者turtle_vel发布出去。
二、修改launch文件
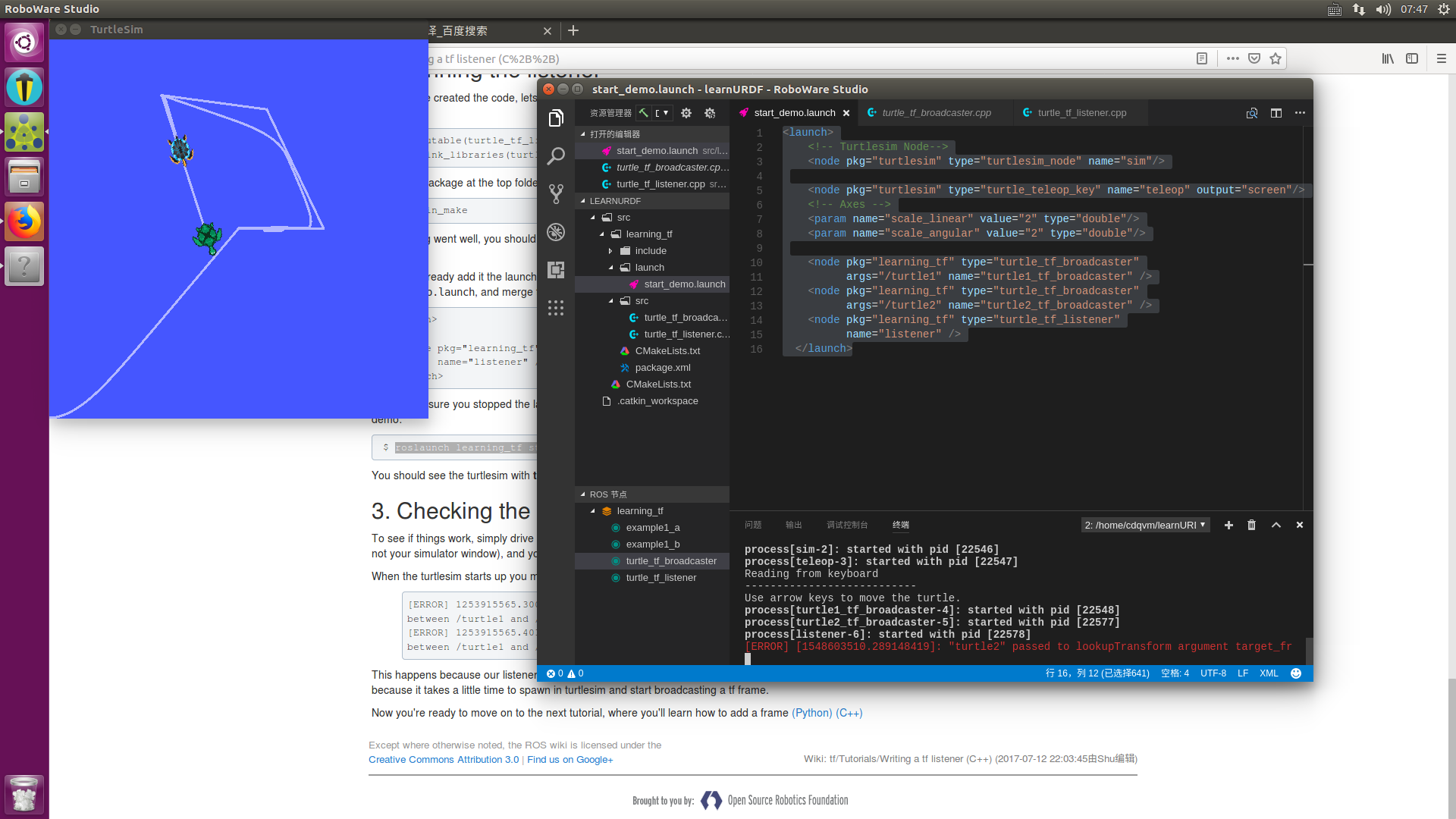
在launch文件末尾添加
<launch> <!-- Turtlesim Node--> <node pkg="turtlesim" type="turtlesim_node" name="sim"/> <node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/> <!-- Axes --> <param name="scale_linear" value="2" type="double"/> <param name="scale_angular" value="2" type="double"/> <node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle1" name="turtle1_tf_broadcaster" /> <node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle2" name="turtle2_tf_broadcaster" /> <node pkg="learning_tf" type="turtle_tf_listener" name="listener" /> </launch>
三、运行
roslaunch learning_tf start_demo.launch
参考自:http://wiki.ros.org/tf/Tutorials/Writing%20a%20tf%20listener%20%28C%2B%2B%29
-END-

















 2277
2277

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









