




 红外避障电路通过LM324芯片比较红外发射管与接收管的信号,调节电位器设定检测距离。当接收到的反射信号超过设定阈值时,单片机控制小车进行避障动作,如左转、右转或前进。电位器R17和R28用于调节左右两侧的检测距离。
红外避障电路通过LM324芯片比较红外发射管与接收管的信号,调节电位器设定检测距离。当接收到的反射信号超过设定阈值时,单片机控制小车进行避障动作,如左转、右转或前进。电位器R17和R28用于调节左右两侧的检测距离。
红外避障电路
红外避障电路由电位器R17,R28;发光二极管D8,D9;红外发射管 D2,D4和红外接收管D3,D5和芯片LM324等组成,LM234用于信号的比较,并产生比较结果输出给单片机进行处理。
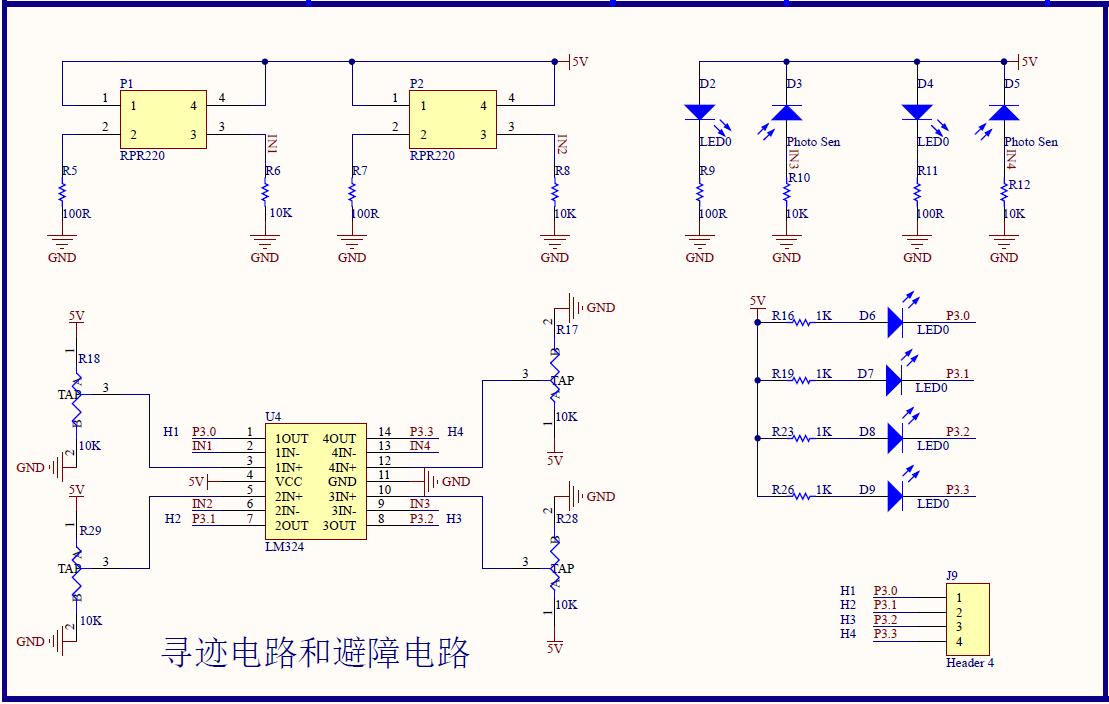
智能小车红外避障运动的原理如下。红外光线具有反射特性,红外发射管发出红外信号,经物体反射后被红外接收管接收。但距离不同的物体反射量是不一样的。对距离近的物体,红外光线的反射量就会多一点,红外接收管的电压输出就会高一点;而对距离远的物体,红外反射量减少,红外接收管的电压输出也低。红外接收管的输出电压信号输入到LM324与电位器的电压输出进行比较(这个
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1340
1340

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











