




我前几天在使用hostease的虚拟主机搭建 WordPress 建立网站时,在安装了Avada 主题后出现访问首页时看到 "Coming Soon" 页面。

本文将带您了解可能的原因并提供相应的解决方法,可以帮助尽快让您的网站正常上线。
缓存问题
您的浏览器或网站的缓存可能导致旧的 "Coming Soon" 页面仍然显示。
解决方法:
清除浏览器缓存,或尝试使用隐身模式访问。
如果您使用了缓存插件(如 WP Super Cache、W3 Total Cache),请清空缓存。
插件导致
某些插件可能会启用自己的 "Coming Soon" 页面。
解决方法:
在 WordPress 后台中,前往 插件 > 已安装插件。
检查是否有 "Coming Soon" 或相关维护模式的插件启用(如 SeedProd、Elementor Maintenance Mode 等),如果有,禁用这些插件并刷新页面。

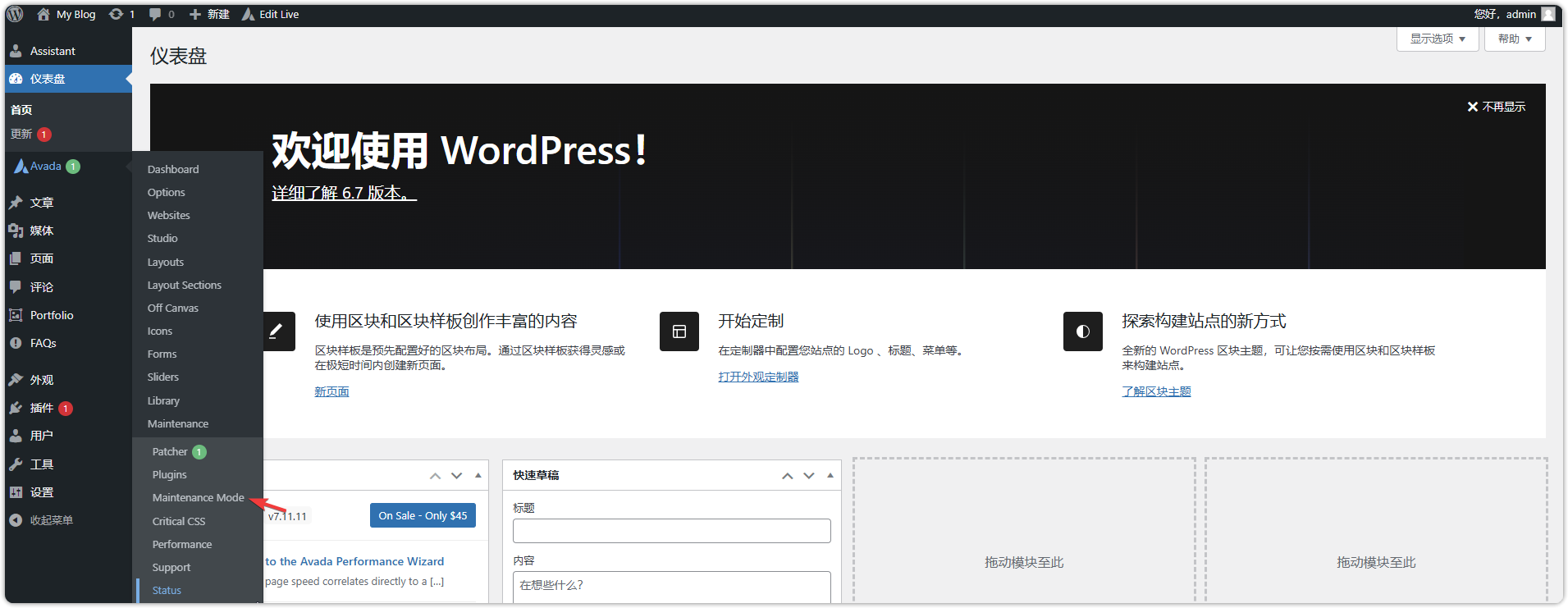
维护模式启用(Maintenance Mode)
Avada 主题自带的 "Maintenance Mode" 或 "Coming Soon Mode" 可能已被启用。我本次遇到这个问题就是Avada主题在新安装的时候默认开启Maintenance Mode。
将状态改成off即可。
解决方法:
登录 WordPress 后台。
前往 Avada > 主题选项 > 维护模式。
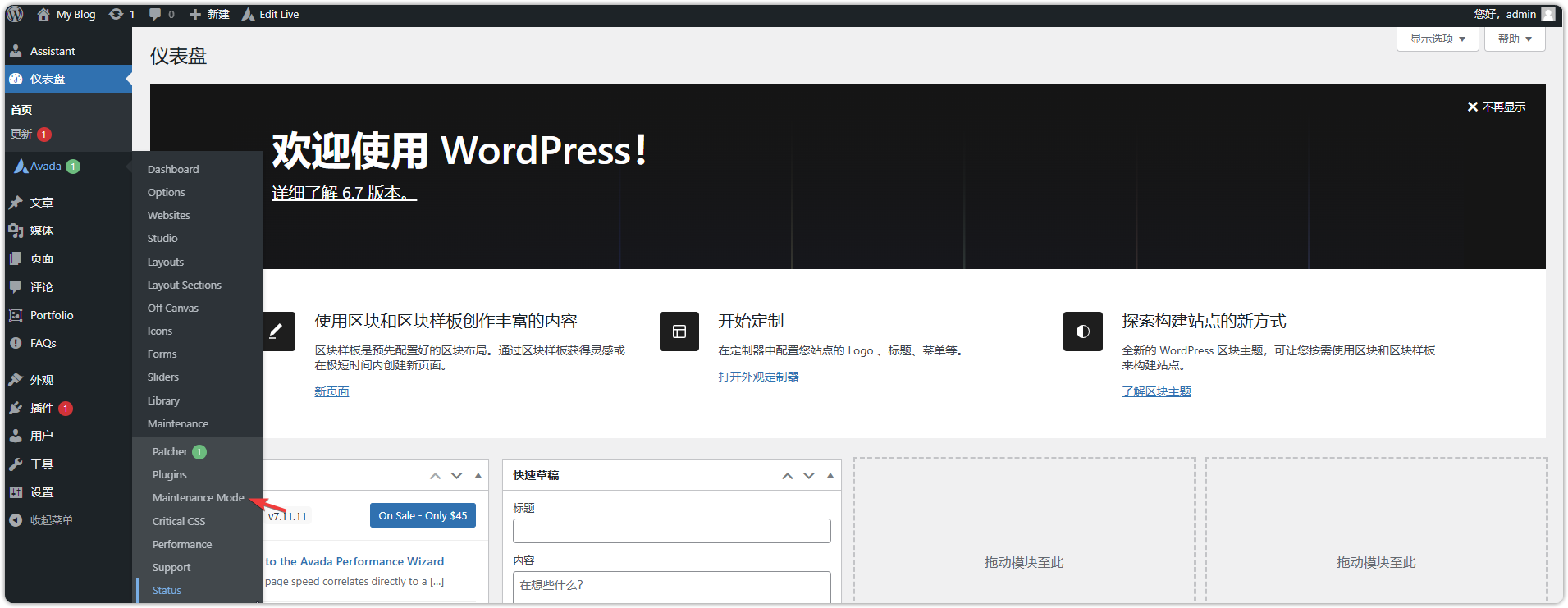
检查是默认启用了 "Coming Soon Mode",将其关闭并保存设置。
总结
使用 Avada 主题构建网站时,遇到 "Coming Soon" 页面可能是一个常见的问题,但通过本文提供的解决方法,您可以轻松排查并解决该问题。

















 475
475

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









