






东方通TongWeb
安装完tongweb后,在安装目录下找到bin目录,bin目录下就是一些启动停止东方通的命令:
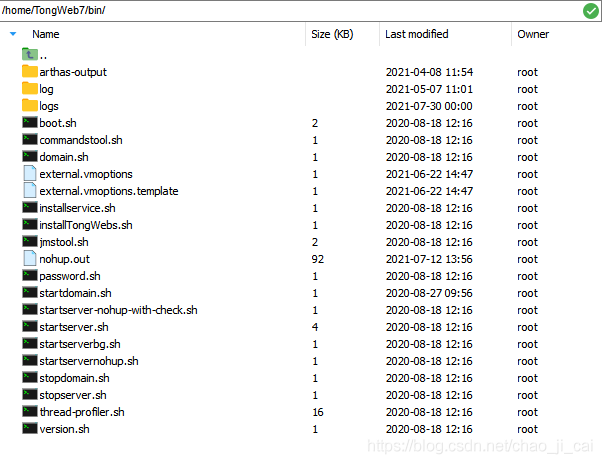
**启动有两种方式:**前天启动和后台启动(推荐后台启动)
前台启动:会直接打出启动日志,但是按ctrl+C退出时东方通也会停止
sh startserver.sh
后台启动:不会打日志,想看日志需要ctrl+c后再输入tail -f nohup.out(输入ctrl+c不影响东方通),如果最后不加“&”,退出当前服务器连接的话,东方通也会停止
nohup sh startserver.sh &
启动完之后,去浏览器输入http://ip:9060/console (默认的是9060端口,新建的域就不是了)
默认用户名密码是thanos和thanos123.com
进入控制台后可以对配置进行优化:
【Web 容器配置】-【访问日志】:取消扩展日志格式
【Web 容器配置】-【虚拟主机管理】:关闭访问日志
【Web 容器配置】-【Https 通道管理】:点开tong-http-listener,更新URL编码格式为UTF-8,parse-body-methods勾选全部类型
【服务】:关闭自动部署和热部署
【监视】-【监视配置】:取消监视功能开关
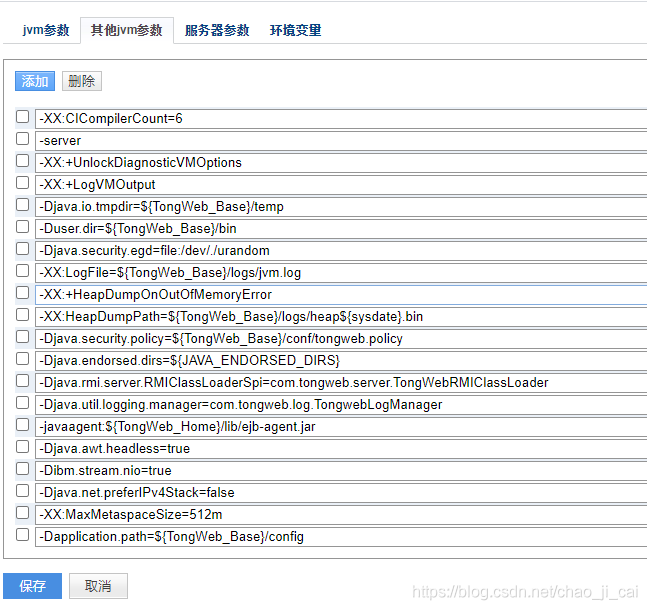
【启动参数配置】-【其他jvm参数】:-XX:MaxMetaspaceSize改成512m
包外配置文件
如果项目使用的是包外配置文件,可以在【启动参数配置】-【其他jvm参数】下添加配置,指定配置文件存放路径:
例如 -Dapplication.path=${TongWeb_Base}/config
config要放在和bin同级的目录下,配置完保存,重启东方通才会生效
注:外部配置文件不是写在这个启动参数里就能立刻生效的,项目代码里也需要一些操作,以java为例,需要的朋友可以参考下web 项目读取外部配置文件
配置完之后,找到 【应用管理】:点击“部署应用”,选择文件(已经打好的war包),其他选项可以默认,开始部署。
如果部署失败,去服务器看下nohup.out日志,定位解决问题;
如果部署成功,在【应用管理】页面点击 http访问 ,即可看到我们的系统啦!
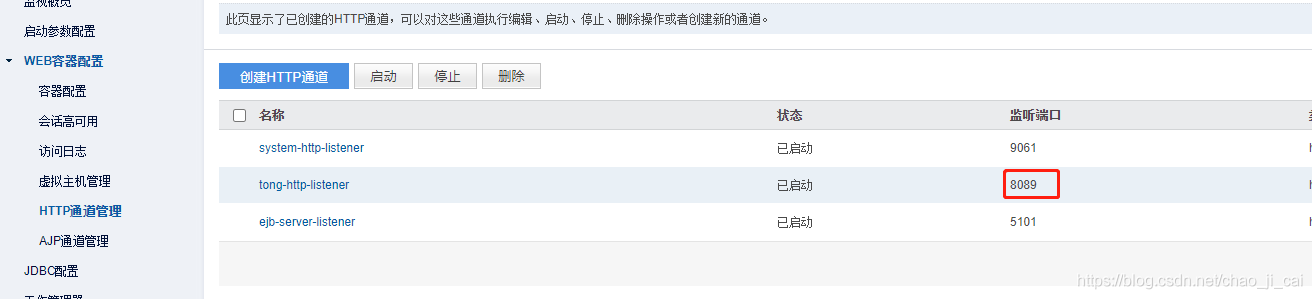
注:东方通指定了系统访问的端口号,端口号是东方通控制台的【WEB容器配置】-【Https 通道管理】-【tong-http-listener】的监听端口
域
安装了一个东方通后,如果想部署多个应用该怎么办呢?
正常人都会想在上一步中所说的【应用管理】里再部署一个应用,但我尝试的时候,无法启动成功。
最后还是新建一个域,在这个域中再部署新应用(部署步骤同上)
创建域
创建时会自动分配一个端口(默认的是9060,新建的第一个域端口加1,即9061)
#相对域,会在安装目录下的domains目录下建立同域名的目录
sh domain.sh create TESTDOMAIN
#绝对域,需要制定绝对路径——不建议,域统一建在domains目录下比较好
sh domain.sh create /opt/TESTDOMAIN
删除域
删除后,对应的端口会被收回,下次再创建新域端口会使用收回的端口
#相对域
sh domain.sh delete TESTDOMAIN
#绝对域
sh domain.sh delete /opt/TESTDOMAIN
启动域
#在安装目录bin目录下
#相对域
sh startdomain.sh ZHBA
#绝对域
sh startdomain.sh /opt/ZHBA
#在域目录bin目录下
sh startservernohup.sh
sh startserver.sh #记得使用后台启动方式(startservernohup也行)
停止域
#在安装目录bin目录下
#相对域
sh stopdomain.sh ZHBA
#绝对域
sh stopdomain.sh /opt/ZHBA
#在域目录bin目录下
sh stopserver.sh
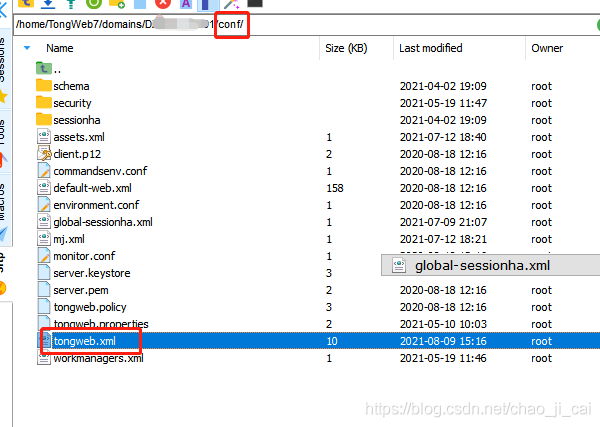
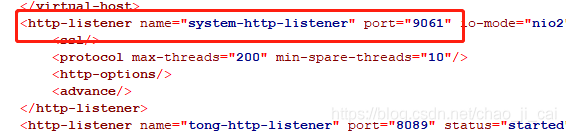
新建的域的控制台端口在域目录下的conf目录下的tongweb.xml文件中找:
https://blog.youkuaiyun.com/chao_ji_cai/article/details/119540209

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









