






1)NRF24L01模块硬件介绍
类似的nrf24L01模块的对外引脚,除了VCC和GND,还有下面6个:

CSN:芯片的片选线,低电平芯片工作;
SCK:芯片控制的时钟线(SPI的时钟);
MISO:芯片控制数据线(SPI的MISO);
MOSI:芯片控制数据线(SPI的MOSI);
IRQ:中断信号,NRF24L01芯片收到数据、或者发送完数据等等一些情况会产生下降沿中断;
CE:芯片的模式控制线,决定了芯片的工作状态。
本文中的硬件连接上,VCC和GND连接到3.3v供电;
CSN连接到PA8引脚;CE连接到PA9引脚;IRQ连接到PB12引脚;
该文中有NRF24L01模块的具体工作流程和寄存器操作说明,这里就不一一介绍了。
http://t.csdn.cn/tjvI8
2)配置cubemx工程
使用SPI2,nrf24L01要求时钟速率设置为8M以下:
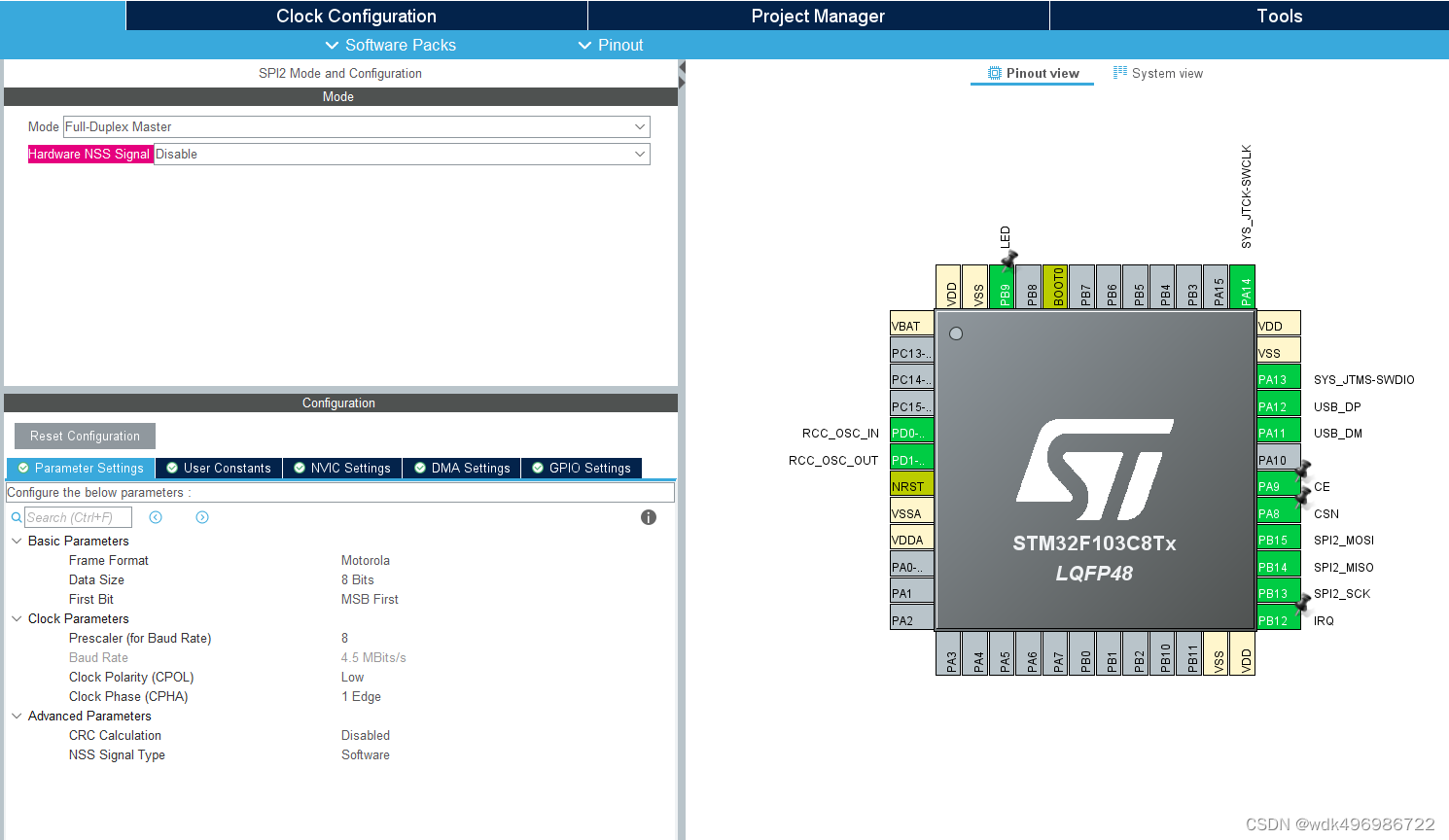
GPIO如下设置:

3)基本通信功能的代码实现
首先是硬件初始化函数,初始化其实就是设置CSN和CE的初始电平:
//初始化24L01的IO口
void NRF24L01_Init(void)
{
NRF24L01_CE_LOW(); //使能24L01
NRF24L01_SPI_CS_DISABLE(); //SPI片选取
HAL_Delay(1);
}
宏定义如下:
#define NRF24L01_SPIx &hspi2 //选择的spi通道
//CSN PIN
#define NRF24L01_SPI_CS_ENABLE() HAL_GPIO_WritePin(CSN_GPIO_Port, CSN_Pin, GPIO_PIN_RESET)
#define NRF24L01_SPI_CS_DISABLE() HAL_GPIO_WritePin(CSN_GPIO_Port, CSN_Pin, GPIO_PIN_SET)
//CE PIN
#define NRF24L01_CE_LOW() HAL_GPIO_WritePin(CE_GPIO_Port, CE_Pin, GPIO_PIN_RESET)
#define NRF24L01_CE_HIGH() HAL_GPIO_WritePin(CE_GPIO_Port, CE_Pin, GPIO_PIN_SET)
// IRQ PIN
#define NRF24L01_IRQ_PIN_READ() HAL_GPIO_ReadPin(IRQ_GPIO_Port,IRQ_Pin)
接下来,封装SPI的读写函数。
/*********************************************************
* 函数功能: 往串行Flash读取写入一个字节数据并接收一个字节数据
* 输入参数: byte:待发送数据
* 返 回 值: uint8_t:接收到的数据
* 说 明:无
********************************************************/
uint8_t SPIx_ReadWriteByte(SPI_HandleTypeDef* hspi,uint8_t byte)
{
uint8_t d_read,d_send=byte;
if(HAL_SPI_TransmitReceive(hspi,&d_send,&d_read,1,0xFF)!=HAL_OK)
{
d_read=0xFF;
}
return d_read;
}
/*********************************************************
* 函数功能: SPI写寄存器
* 输入参数: value:要写入的数据
* 返 回 值: 无
* 说 明:reg:指定寄存器地址
*
********************************************************/
uint8_t NRF24L01_Write_Reg(uint8_t reg,uint8_t value)
{
uint8_t status;
NRF24L01_SPI_CS_ENABLE(); //使能SPI传输
status =SPIx_ReadWriteByte(NRF24L01_SPIx,reg);//发送寄存器号
SPIx_ReadWriteByte(NRF24L01_SPIx,value); //写入寄存器的值
NRF24L01_SPI_CS_DISABLE(); //禁止SPI传输
return(status); //返回状态值
}
/********************************************************
* 函数功能: 读取SPI寄存器值
* 输入参数: 无
* 返 回 值: 无
* 说 明:reg:要读的寄存器
*
********************************************************/
uint8_t NRF24L01_Read_Reg(uint8_t reg)
{
uint8_t reg_val;
NRF24L01_SPI_CS_ENABLE(); //使能SPI传输
SPIx_ReadWriteByte(NRF24L01_SPIx,reg); //发送寄存器号
reg_val=SPIx_ReadWriteByte(NRF24L01_SPIx,0XFF);//读取寄存器内容
NRF24L01_SPI_CS_DISABLE(); //禁止SPI传输
return(reg_val); //返回状态值
}
/**********************************************************
* 函数功能: 在指定位置读出指定长度的数据
* 输入参数:
* 返 回 值: 此次读到的状态寄存器值
* 说 明:reg:寄存器(位置) *pBuf:数据指针 len:数据长度
*
********************************************************/
uint8_t NRF24L01_Read_Buf(uint8_t reg,uint8_t *pBuf,uint8_t len)
{
uint8_t status,uint8_t_ctr;
NRF24L01_SPI_CS_ENABLE(); //使能SPI传输
status=SPIx_ReadWriteByte(NRF24L01_SPIx,reg);//发送寄存器值(位置),并读取状态值
for(uint8_t_ctr=0;uint8_t_ctr<len;uint8_t_ctr++)
{
pBuf[uint8_t_ctr]=SPIx_ReadWriteByte(NRF24L01_SPIx,0XFF);//读出数据
}
NRF24L01_SPI_CS_DISABLE(); //关闭SPI传输
return status; //返回读到的状态值
}
/*********************************************************
* 函数功能: 在指定位置写指定长度的数据
* 输入参数: 无
* 返 回 值: 无
* 说 明:reg:寄存器(位置) *pBuf:数据指针 len:数据长度
*
********************************************************/
uint8_t NRF24L01_Write_Buf(uint8_t reg, uint8_t *pBuf, uint8_t len)
{
uint8_t status,uint8_t_ctr;
NRF24L01_SPI_CS_ENABLE(); //使能SPI传输
status = SPIx_ReadWriteByte(NRF24L01_SPIx,reg);//发送寄存器值(位置),并读取状态值
for(uint8_t_ctr=0; uint8_t_ctr<len; uint8_t_ctr++)
{
SPIx_ReadWriteByte(NRF24L01_SPIx,*pBuf++); //写入数据
}
NRF24L01_SPI_CS_DISABLE(); //关闭SPI传输
return status; //返回读到的状态值
}
到这里SPI的读写函数就已经封装完了,接下来,可以利用它们来配置和读取nrf24L01的寄存器。
检查nrf24L01是否通信正常,主要思想是,往TX_ADDR地址寄存器中写入了5个数,然后再读出来,对比是否一样,一样则认为通信成功:
/*********************************************************
* 函数功能: 检测24L01是否存在
* 输入参数: 无
* 返 回 值: 0,成功;1,失败
* 说 明:无
********************************************************/
uint8_t NRF24L01_Check(void)
{
uint8_t buf[5]={0XA5,0XA5,0XA5,0XA5,0XA5};
uint8_t i;
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,buf,5);//写入5个字节的地址.
NRF24L01_Read_Buf(TX_ADDR,buf,5); //读出写入的地址
for(i=0;i<5;i++)if(buf[i]!=0XA5)break;
if(i!=5)return 1; //检测24L01错误
return 0; //检测到24L01
}
在实现基础的无线通信时,我们使用一个节点作为发送方,一个节点作为接收方;发送方和接收方的配置、程序都不同。
先实现发送方,在配置发送状态时,一般需要配置以下几个寄存器:
a)设置tx地址;寄存器TX_ADDR
b)设置rx地址;RX_ADDR_P0,这个地址用于收ack
c)使能自动应答;EN_AA
d)使能通道0的接收地址;EN_RXADDR
e)配置自动重发次数;SETUP_RETR
f)设置通信频率;RF_CH
g)设置通信速率、增益等;RF_SETUP
h)设置通道0有效数据宽度;Rx_Pw_P0
i)设置为tx状态;CONFIG
其中b、c、d、e、h几个步骤的寄存器和自动应答相关,如果不需要,可以不设置,那么接收方就不会自动回复ack。
而如果设置了,接收方收到数据会回复一个ack,如果发送方未收到ack则会重复发送数据包,直到设置的最大次数。
这里我们给出的代码是设置自动应答的,具体实现如下,有详细注释:
其中要注意的是,如果需要自动应答,则发送方的接收地址0(RX_ADDR_P0)需要设置为与发送地址一致,因为发送方是从地址0来接收ack的,如果不一致会收不到ack。(代码中都设置为TX_ADDRESS)
/********************************************************
* 函数功能: 该函数初始化NRF24L01到TX模式
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*
*******************************************************/
void NRF24L01_TX_Mode(void)
{
NRF24L01_CE_LOW();
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(uint8_t*)TX_ADDRESS,TX_ADR_WIDTH);//写TX节点地址
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(uint8_t*)RX_ADDRESS,RX_ADR_WIDTH); //设置TX节点地址,主要为了使能ACK
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01); //使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+SETUP_RETR,0x15);//自动重发延时等待500us+86us,自动重发5次,根据自己需要设置
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通道为40
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG,0x0e); //配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式,开启所有中断
NRF24L01_CE_HIGH();//CE为高,10us后启动发送
HAL_Delay(1);
}
发送数据的函数实现如下。
向WR_TX_PLOAD寄存器写入要发送的数据,最大32个,然后,拉高CE,130us后就可以启动发送了;如果设置了自动回复,可以回读状态,查看是否发送成功:
/********************************************************
* 函数功能: 启动NRF24L01发送一次数据
* 输入参数: 无
* 返 回 值: 发送完成状况
* 说 明:txbuf:待发送数据首地址
*
*******************************************************/
uint8_t NRF24L01_TxPacket(uint8_t *txbuf)
{
uint8_t sta;
//CE拉低,使能24L01配置
NRF24L01_CE_LOW();
NRF24L01_Write_Buf(WR_TX_PLOAD,txbuf,TX_PLOAD_WIDTH);//写数据到TX BUF 32个字节
NRF24L01_CE_HIGH();//CE置高,使能发送
while(NRF24L01_IRQ_PIN_READ()!=0);//等待发送完成
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); //清除TX_DS或MAX_RT中断标志
if(sta&MAX_TX)//达到最大重发次数
{
NRF24L01_Write_Reg(FLUSH_TX,0xff);//清除TX FIFO寄存器
return MAX_TX;
}
if(sta&TX_OK)//发送完成
{
return TX_OK;
}
return 0xff;//其他原因发送失败
}
再实现接收方:
在配置接收状态时,一般需要配置以下几个寄存器:
a)设置rx地址;RX_ADDR_P0,必须与发送方的发送地址一致,否则收不到
b)使能自动应答;EN_AA
c)使能通道0的接收地址;EN_RXADDR
d)设置通信频率;RF_CH,必须与发送方的一致
e)设置通道0的有效数据宽度;Rx_Pw_P0,最大32
h)配置速率、增益等;RF_SETUP,速率等信息必须与发送方的一致网址:yii666.com
i)设置为rx状态;CONFIG
/********************************************************
* 函数功能: 该函数初始化NRF24L01到RX模式
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*
*******************************************************/
void NRF24L01_RX_Mode(void)
/********************************************************
* 函数功能: 该函数初始化NRF24L01到RX模式
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*
*******************************************************/
void NRF24L01_RX_Mode(void)
{
NRF24L01_CE_LOW();
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(uint8_t*)RX_ADDRESS,RX_ADR_WIDTH);//写RX节点地址
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01);//使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通信频率
NRF24L01_Write_Reg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);//选择通道0的有效数据宽度
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f);//设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG, 0x0F);//配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC
NRF24L01_CE_HIGH(); //CE为高,进入接收模式
HAL_Delay(1);
}
接收数据的函数实现如下,就是查询是否有接收中断标志,如果有,则读取接收的数据:
/**
* 函数功能:启动NRF24L01接收一次数据
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*
*/
uint8_t NRF24L01_RxPacket(uint8_t *rxbuf)
{
uint8_t sta;
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); //清除TX_DS或MAX_RT中断标志
if(sta&RX_OK) //接收到数据
{
NRF24L01_Read_Buf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH);//读取数据
NRF24L01_Write_Reg(FLUSH_RX,0xff); //清除RX FIFO寄存器
return 0;
}
return 1; //没收到任何数据
}
实现完上述函数,nrf24L01的配置就都完成了。接下来可以编写两个测试程序进行测试。
4)一对多通信
这里偷个
上面的例子中,发送端和接收端是通过把地址0设置为相同的一个地址,实现发送和接收的,而实际上,nrf24L01有6个通道,可以设置不同的地址,依据地址的不同,可以实现1对多的通信。
如下编写程序:
/********************************************************
* 函数功能: 该函数初始化NRF24L01到TX模式
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*
*******************************************************/
void NRF24L01_TX_Mode(void)
{
NRF24L01_CE_LOW();
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(uint8_t*)TX_ADDRESS2,TX_ADR_WIDTH);//写TX节点地址
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(uint8_t*)RX_ADDRESS2,RX_ADR_WIDTH); //设置TX节点地址,主要为了使能ACK
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01); //使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+SETUP_RETR,0x15);//自动重发延时等待500us+86us,自动重发5次,根据自己需要设置
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通道为40
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG,0x0e); //配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式,开启所有中断
NRF24L01_CE_HIGH();//CE为高,10us后启动发送
HAL_Delay(1);
}
发送端修改发送和接收ack的地址为INIT_ADDR2
【STM32+cubemx】0026 HAL库开发:NRF24L01无线2.4G通信模块的应用
接收端设置通道2的地址为INIT_ADDR2,同时修改设置通道2的自动应答、接收地址、宽度:
/********************************************************
* 函数功能: 该函数初始化NRF24L01到RX模式
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*
*******************************************************/
void NRF24L01_RX_Mode(void)
{
NRF24L01_CE_LOW();
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(uint8_t*)RX_ADDRESS1,RX_ADR_WIDTH);//写RX节点1地址
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(uint8_t*)RX_ADDRESS2,1);//写RX节点2地址
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x04); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x04);//使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通信频率
//NRF24L01_Write_Reg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);//选择通道0的有效数据宽度
NRF24L01_Write_Reg(NRF_WRITE_REG+RX_PW_P2,RX_PLOAD_WIDTH);//选择通道0的有效数据宽度
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f);//设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG, 0x0F);//配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC
NRF24L01_CE_HIGH(); //CE为高,进入接收模式
HAL_Delay(1);
}
这里注意,通道2 —5只能有1字节与通道1不同。设置通道2–5的地址时,要先设置通道1,之后再设置不同的那1个字节。
这样,发送端修改地址为INIT_ADDR2,该地址与接收端的通道2地址匹配,那么,接收端就会从通道2中收到数据。
仍然使用上一节的测试程序,也可以测试成功。
需要实现一对多通信时,6个接收端可以把自己的6个通道设为不同地址,发送端修改不同地址向各接收端发送即可实现。
5)通过自动应答ack回复数据
nrf24L01的扩展型号nrf24L01+具备ack中带数据回复的功能,即在接收方自动回复ack时,可以同时携带一包数据返回给发送方,利用这个特性,可以实现高效的通信。
设置自动回复ack带数据包时,必须使用动态数据长度的功能(动态载荷)。
发送方如下设置:
与基础通信不同的主要是设置了动态载荷。
/********************************************************
* 函数功能: 该函数初始化NRF24L01到TX模式设置
自动回复ack带数据包
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*
*******************************************************/
void NRF24L01_TX_Mode_AckData(void)
{
NRF24L01_CE_LOW();
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(uint8_t*)TX_ADDRESS,TX_ADR_WIDTH);//写TX节点地址
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(uint8_t*)RX_ADDRESS,RX_ADR_WIDTH); //设置TX节点地址,主要为了使能ACK
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01); //使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+SETUP_RETR,0x15);//自动重发延时等待500us+86us,自动重发5次,根据自己需要设置
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通道为40
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG,0x0e); //配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式,开启所有中断
#if DYNAMIC_PAYLOAD //开启动态载荷
NRF24Lo1_write_Reg(NRF_WRITE_REG |FLUSH_TX,0xff);//清除缓冲区数据
NRF24Lol_write_Reg (NRF_WRITE_REG FLUSH_RX,Oxff);
NRF24L01_write_Reg (NRF_WRITE_REG | FEATURE,0x07) ;//开启动态载荷
if(NRF24L01_Write_Reg (FEATURE)-= oxoo)//回读,确认开启成功
{
NRF24L01_Write_Reg(Activate,Code_Activate) ;//开启动态载荷
}
NRF24L01_Write_Reg (NRF_WRITE_REG | DYNPD,0x0l);//开启动态载荷
NRF24L01_write_Reg (NRF_WRITE_REG | FEATURE,0x07);//开启动态载荷
#else
NRF24L01_Write_Reg(NRF_WRITE_REG | RX_PW_P0,RX_PLOAD_WIDTH);//固定长度
#endif
NRF24L01_CE_HIGH();//CE为高,10us后启动发送
HAL_Delay(1);
}
接收方如下设置:
也是需要设置动态载荷,另外使用哪个通道,则需要把该通道的自动应答、接收地址等都设为使能:
/********************************************************
* 函数功能: 该函数初始化NRF24L01到RX模式
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*
*******************************************************/
void NRF24L01_RX_Mode_AckData(void)
{
NRF24L01_CE_LOW();
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(uint8_t*)RX_ADDRESS,RX_ADR_WIDTH);//写RX节点地址
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x3f); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x3f);//使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通信频率
NRF24L01_Write_Reg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);//选择通道0的有效数据宽度
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f);//设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG, 0x0F);//配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC
#if DYNAMIC_PAYLOAD //开启动态载荷
NRF24L01_write_Reg (NRF_WRITE_REG| FEATURE,0x07);//开启动态载荷
if(NRF24L01_Read_Reg (FEATURE)-=0x00)//回读,确认开启成功
{
NRF24L01_write_Reg (Activate,Code_Activate) ;//开启动态载荷
}
NRF24L0l_write_Reg(NRF_WRITE_REG |DYNPD,0x3f) ;//开启动态载荷
NRF24LOl_write_Reg(NRF_WRITE_REG | FEATURE,0x07);l/开启动态载荷
#else
NRF24L01_Write_Reg(NRF_WRITE_REG | RX_PW_P1,RX_PLOAD_WIDTH);//固定长度
NRF24L01_Write_Reg(NRF_WRITE_REG | RX_PW_P2,RX_PLOAD_WIDTH);//固定长度
NRF24L01_Write_Reg(NRF_WRITE_REG | RX_PW_P3,RX_PLOAD_WIDTH);//固定长度
NRF24L01_Write_Reg(NRF_WRITE_REG | RX_PW_P4,RX_PLOAD_WIDTH);//固定长度
NRF24L01_Write_Reg(NRF_WRITE_REG | RX_PW_P5,RX_PLOAD_WIDTH);//固定长度
#endif
NRF24L01_CE_HIGH(); //CE为高,进入接收模式
HAL_Delay(1);
}
发送方要发数据时,与基本的发送方式不同之处在于:我们需要接收ack返回的数据,所以要先将接收fifo清空,误将以前的数据认为是本次收到的;在发送完成后,可以查询状态并接收数据;这个数据就是接收方通过ack返回的。
发送数据的核心部分代码如下
uint8_t NRF24L01_TxPacket_ack_data (uint8_t *tx_buf, uint8_t len)
{
unsigned char state;
uint8_t rxbuf_len;
NRF24L01_CE_LOW();
NRF24L01_Write_Reg(NRF_WRITE_REG | FLUSH_TX,0xff);//清除缓冲区数据NRF24L01_write_Reg(SPI_WRITE_REG | FLUSH_RX,0xff);
//设置Tx节点地址
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR, (uint8_t*)TX_ADDRESS,TX_ADR_WIDTH);//设置Tx节点地址,主要为了使能Ack
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(uint8_t*)TX_ADDRESS,TX_ADR_WIDTH);
NRF24L01_Write_Buf(NRF_WRITE_REG | WR_TX_PLOAD, tx_buf,len);//写入要发送的数据
NRF24L01_CE_HIGH();//CE为高,10us后启动发送
//delay_us( 20) ;
while(NRF24L01_IRQ_READ()!=0); //等待发送完成
state=NRF24L01_Read_Reg (STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,state);//清除Tx_Ds或MAx_RT中断标志
if(state&RX_OK) //接收到ack的数据
{
rxbuf_len =NRF24L01_Read_Reg(R_RX_PL_WID) ;
if(rxbuf_len <33)
{
NRF24L01_Write_Buf(RD_RX_PLOAD,NRF24L01_RXDATA,rxbuf_len);//读取数据debug_out("RXread data ! irin" ) ;
}
NRF24L01_Write_Reg (FLUSH_RX,0xff); //清除RXFIFo寄存器
uint8_t rx_ch = (state & 0x0e)>>1; //接收的通道号
}
if(state&MAX_TX) //达到最大重发次数
{
NRF24L01_Write_Reg (FLUSH_TX,0xff); //清除TXFIFo寄存器
return MAX_TX;
}
else if(state&TX_OK)return TX_OK; //发送完成
}
接收方要接收数据时,与基本通信方式一样,都是查询状态,有数据则回读;当接收方有数据要通过ack返回给发送方时,需要在接收到数据130us之内将数据写入到WR_ACK_PAYLOAD(地址0xA8)中,这样在ack返回时就会将数据字段发给发送方。
可以按如下方式,向WR_ACK_PAYLOAD寄存器中写入要返回的数据:
//在ack中回复数据
void nRF24L0l_Rx_AckPayload (uint8_t *tx_buf,uint8_t ch)
{
NRF24L01_Write_Reg(NRF_WRITE_REG | FLUSH_TX,0xff);//清空tx fifo
NRF24L01_Write_Buf(NRF_WRITE_REG | WR_ACK_PAYLOAD | ch,tx_buf,32 );
}
注意ch通道,要和接收到数据的通道号一样。
测试时,在接收端,我们接收数据后,就调用此nRF24L01_Rx_AckPayload函数填充数据;
在发送端,先清空接收fifo,发送完数据后,我们可以查询是否有数据接收到,接收到的数据即是通过ack返回的数据。
6)调试技巧
在调试无线模块的时候,由于无线信道本身会有干扰、信号质量差等因素,会比一般的模块更加困难;可以先确保寄存器的读写正常,再调试单一地址通信,再调试多个不同地址的通信。
7)调试后记补充
ACK回复是即时WR_ACK_PAYLOAD缓存回复,所以ACK返回的数据总是要落后一步,不具备判断后再回复的功能。所以WR_ACK_PAYLOAD所承载的数据需要提前写入。如果发送端想要通过发送命令来获取接收端的数据,则需要发送两次数据。
具体操作为:
第一次发送命令,接收端收到后会通过ACK返回WR_ACK_PAYLOAD中已存在的数据。同时根据命令准备数据写入到WR_ACK_PAYLOAD中。
在收到发送端发送的第二次数据后通过ACK返回第一次命令所需要的数据。
发送端
HAL_Delay(500);
if(NRF24L01_TxPacket_ack_data(INIT_ADDR1, tmp_buff, 32) == TX_OK) //
{
if(NRF24L01_TxPacket_ack_data(INIT_ADDR1, tmp_buff, 32) == TX_OK)
{
tmp_buff[1]=tmp_buff[0];
tmp_buff[0]=rxbuf[0];
USBD_CUSTOM_HID_SendReport(&hUsbDeviceFS,tmp_buff,21);//发送HID数据
HAL_Delay(100);
}
}
接收端
if(NRF24L01_RxPacket_ack_data(HIDBuf) == 0)
{
HIDBuf[0]+=1;
nRF24L01_Rx_AckPayload(HIDBuf, 0);
}


















 5742
5742

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









