






基于OSGEARTH的相控阵雷达搜索屏二维绘制方法
关于相控阵雷达搜索屏的定义参见博文《基于工作模式的相控阵雷达功能仿真方法》。博文《雷达作用范围的二维绘制方法》所阐述的技术也适用于相控阵雷达搜索屏单个分区的绘制。但面临多个分区绘制,以及与跟踪空域同时绘制,就面临一些新的问题。
一、沿用旧有方法
博文《雷达作用范围的二维绘制方法》所阐述技术的核心可归结为:针对最远最近距离、雷达坐标系高度、高程3种不同模式,计算雷达探测范围内、外环上的离散点,构造输出几何形状。其中,在内、外环之间直接以直线段进行连接。
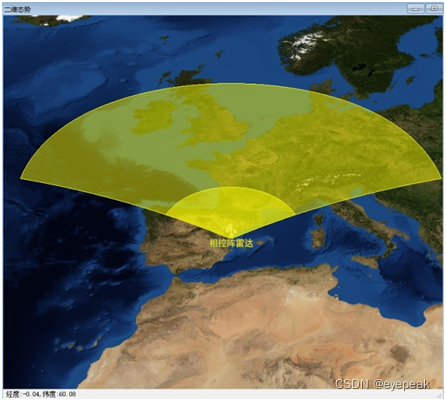
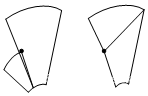
各个分区均采用上述技术直接绘制,高低双屏的绘制效果如图所示
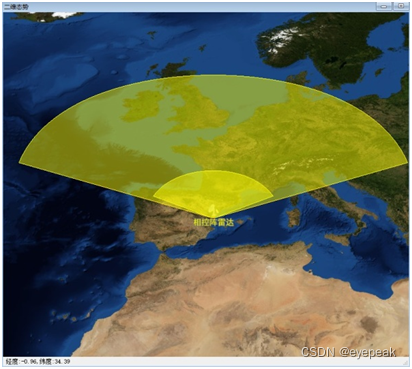
方位角范围一致的高低屏,在二维上显示却不一致了。
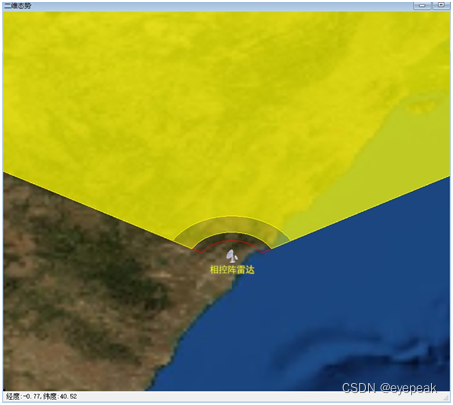
放大后观察局部,如图所示
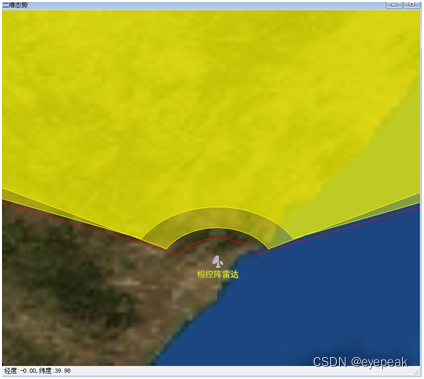
高屏、低屏、跟踪区域,3个最小距离完全相同的区域,在二维上也不一致了。
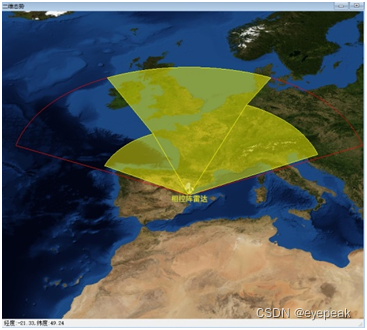
再看一下远近分区的显示效果
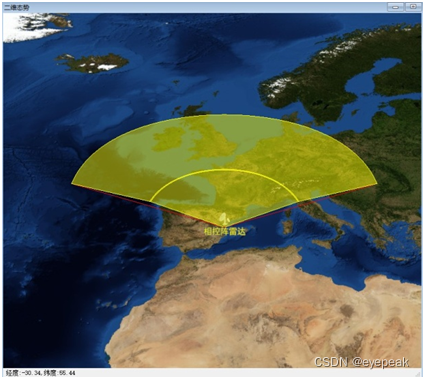
远近2个分区之间存在重叠部分,搜索屏边界与跟踪区域边界也并不吻合。
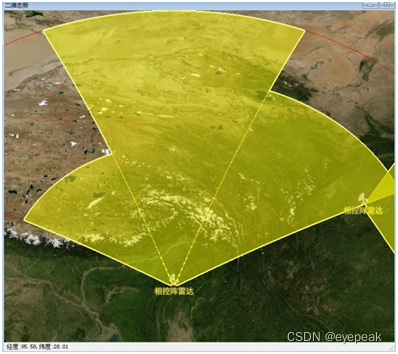
再看方位分区效果
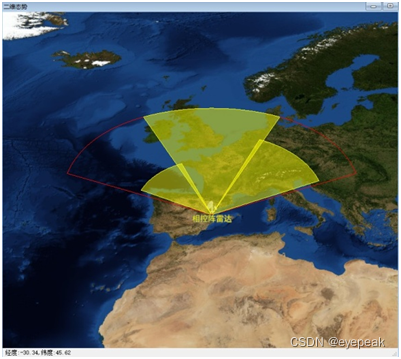
方位上连续的各个分区,却在方位方向上产生了重叠。
上述距离方向上的不一致是正确的现象。以远近分区中间重叠部分为例:当采用最远最近距离模式时,近分区的最远距离是该分区远端最小仰角对应的投影,远分区的最近距离是该分区近端最大仰角对应的投影。因此,虽然近分区的远端与远分区近端是一致的,但表现在二维范围上不一致,产生了重叠部分。其他距离方向的不一致现象原因均与此类似。
上述方位方向上的不一致(重叠、方位边界不一致)现象是可以优化的,其原因在于经纬度的投影本身的变形。即前述的直接在内、外环之间连线的方法并不合理,虽然在三维空间确实是直线,但是在投影平面上却不是直线,而是本身就应该有变形,这就产生了下面的方法。
二、径向离散技术
对于相控阵雷达搜索屏而言,理论上生成的形状不存在CircleWithHole和CircleWithoutHole这2种情况,而应该只有Fan和FanCap这2种情况。径向离散也只作用在后2种情况下。
径向离散即距离方向上的离散,即在内外环之间不再连接一条直线,而是按距离离散为若干个点。离散在三维进行,然后投影到经纬度平面:取内外环下边界对应2边界点;在2点之间每隔指定距离(20km)生成一个新点。
此时产生的二维边界如图所示

这种数据可用于绘制边界,但是由于生成形状并不确保为凸多边形,因此不能支持区域的绘制,而是必须生成网格,即对于每组内外环对应点(对于Fan,则是中心点和每个外环点),均需生成离散点,如此构成绘制所用网格才可以。
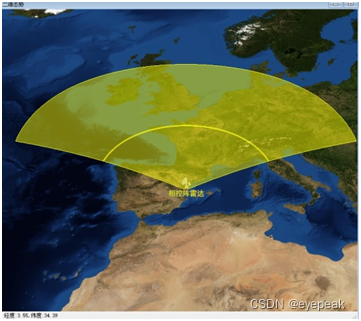
此时,高低双屏的绘制效果如图所示
此时可以看出,方位边缘不再是直线,而是曲线。高低屏的边界吻合一致。
局部放大,效果如图
方位边缘吻合。当然内边界仍然并不一致,这正是前面所分析的,最小最大距离情况下,内边界是近端最大仰角所对应的投影,本身就是如此。
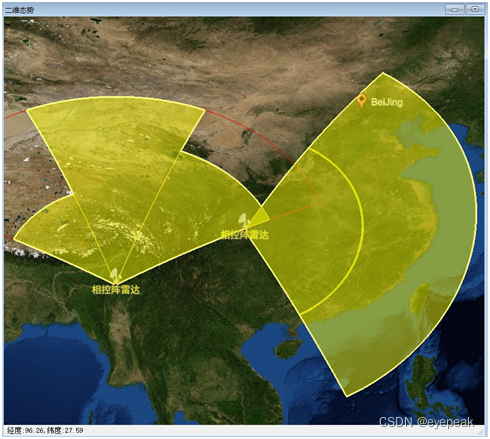
远近分区的效果如图
方位分区的效果如图
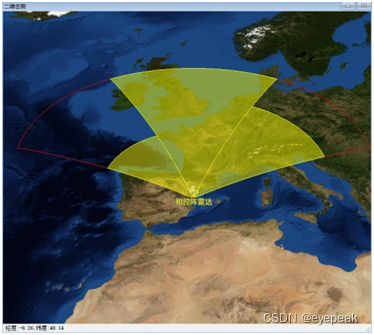
对于方位分区而言,存在分区的最大距离并不恰好对应于采样距离的整数倍的情况(本身较为少见),此时存在相邻分区中边界点中存在1个不一致点的情况,但除非放大很多达到离散后线段清晰可见的程度,否则对显示效果并无影响。如果非常在意此点,直接加密采样点即可。
三、方位分区的特殊处理
方位分区进行了2项特殊处理。
1.径向直连情况下的拼接
仍然是每个分区进行绘制,但是对于每个分区进行如下处理:判断左右分区最大距离与本分区最大距离的关系,如果小于本分区最大距离,则在该距离处插入一个新点;以该点为分界,用2个POLYGON绘制,如图所示。
绘制效果如图
2.径向离散情况下的拼接
如果单纯是显示相控阵雷达的搜索屏范围,在径向离散的情况下并不需要进行拼接处理。但是我们还需要显示多个雷达的包络,此时,对于方位分区模式,使用径向离散之后的数据,则相邻的分区的边是存在重合的部分的。而用于进行多边形union操作的GEOS库在处理重合边的时候,会将一些边线作为union的结果。
如图所示
图中分区边界处如同虚线的部分即是这种错误。
因此需要将多个分区拼接为一个整体,以避免出现重复边。
拼接算法按顺序处理每个分区离散后数据:先根据左侧分区最大距离是否小于当前分区,确定是否需要加入左侧离散数据,根据2分区最大距离差计算加入离散数据的个数;然后加入上边界全部数据;再类似处理右侧离散数据。然后在按相反顺序加入所有分区的下边界数据即可。
进行了分区拼接后包络线显示如图所示
此时,包络线的显示正确。

















 229
229

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









