



 文章讨论了如何将IMU数据转化为世界坐标系中的姿态,涉及欧拉角表示的旋转矩阵,以及如何通过角速度积分计算姿态变化,同时提到了偏航角的计算挑战和位置、速度的累加过程。
文章讨论了如何将IMU数据转化为世界坐标系中的姿态,涉及欧拉角表示的旋转矩阵,以及如何通过角速度积分计算姿态变化,同时提到了偏航角的计算挑战和位置、速度的累加过程。
首先,imu数据本身的校准滤波,还涉及到用什么传感器协同问题,这个不在本文表述范围.我们探讨的是imu数据到姿态的转化.使用问题.
1 从每一帧的坐标系转化到世界坐标系,R代表了在世界坐标中的姿态
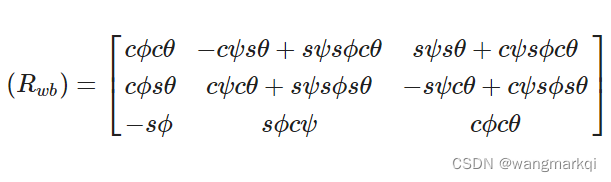
2 转化矩阵用欧拉角表述(roll 翻滚ϕ, pitch 俯仰θ, and yaw偏航 ψ):
3 初始位置的世界坐标

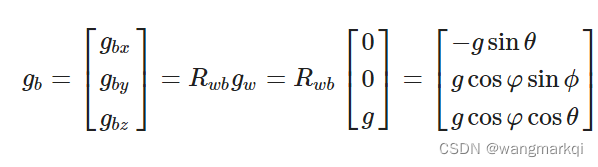
4 当imu旋转一定的姿态时,重力加速度会在3个轴上产生相应的分量,其本质是大地坐标系下的(0,0,g)在此刻imu坐标系下的坐标,也就是此刻imu的姿态,这个也是我们最终要的,但是为了得到这个旋转矩阵,需要欧拉角
此外需要注意这个旋转矩阵的物理意义,它代表,世界坐标[0,0,g]在新的坐标系下的位置,如果把新的坐标转回到世界坐标,应该求逆
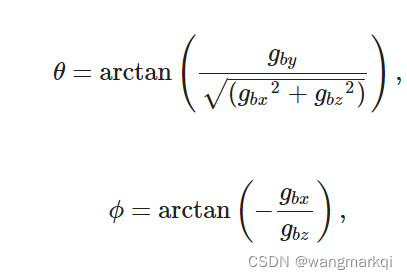
5 其中两个欧拉角,俯仰角和翻滚角,直接可以用惯导的旋转加速度得出,但是偏航角不可以,偏航角可以用下面的方法,但是有累计误差
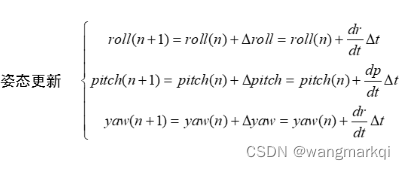
6 三个欧拉角也可以通过积分获取. IMU在第n个时刻的姿态角度为r、p、y,此时需要计算下一个时刻(n+1)的姿态。设n+1时刻的姿态角为r+Δr、p+Δp、y+Δy,该姿态也是经历了3次旋转。要想计算n+1时刻的姿态,只要在n时刻姿态的基础上,加上对应的姿态角度变化量即可。姿态角度的变化量可以通过角速度与采用时间周期积分即可。
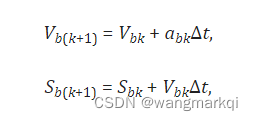
7 位置平移和速度需要时间序列不停累加

















 2993
2993

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









