openpose 官方相机标定流程(3)补充说明
最新推荐文章于 2025-09-20 22:24:46 发布








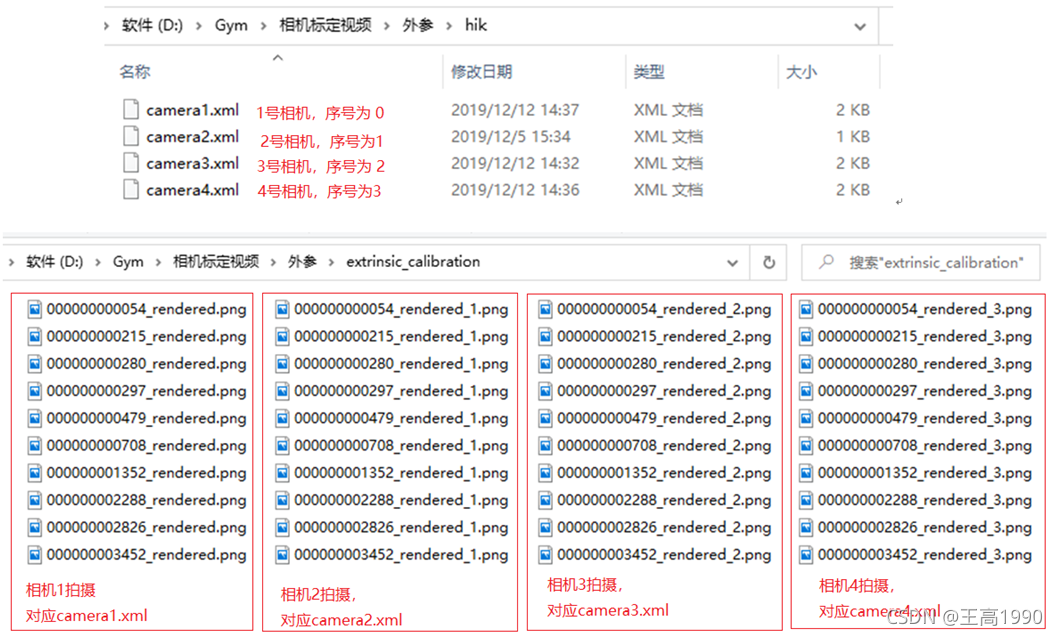
 本文详细介绍了使用openpose进行多路相机外参标定的过程,包括同时拍摄标定、两路相机标定的具体步骤及参数设置。在标定过程中遇到的问题,如标定失败,可通过调整参数或删除异常图片对解决,确保相机间同步和棋盘格稳定。
本文详细介绍了使用openpose进行多路相机外参标定的过程,包括同时拍摄标定、两路相机标定的具体步骤及参数设置。在标定过程中遇到的问题,如标定失败,可通过调整参数或删除异常图片对解决,确保相机间同步和棋盘格稳定。
本文详细介绍了使用openpose进行多路相机外参标定的过程,包括同时拍摄标定、两路相机标定的具体步骤及参数设置。在标定过程中遇到的问题,如标定失败,可通过调整参数或删除异常图片对解决,确保相机间同步和棋盘格稳定。
本文详细介绍了使用openpose进行多路相机外参标定的过程,包括同时拍摄标定、两路相机标定的具体步骤及参数设置。在标定过程中遇到的问题,如标定失败,可通过调整参数或删除异常图片对解决,确保相机间同步和棋盘格稳定。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


















 677
677







