




 本文介绍了一款基于Qt实现的飞行仪表盘控件程序。该程序通过定时更新仪表读数来模拟飞行状态,并提供了手动输入和自动模拟两种模式。文章分享了程序的主要代码片段和资源下载链接。
本文介绍了一款基于Qt实现的飞行仪表盘控件程序。该程序通过定时更新仪表读数来模拟飞行状态,并提供了手动输入和自动模拟两种模式。文章分享了程序的主要代码片段和资源下载链接。
前言
一款用Qt做的飞行控件程序,从https://goldenhawking.blog.youkuaiyun.com/article/details/78817426?spm=1001.2014.3001.5506
这篇博客上看到的,但这篇博客里提到的两处源码地址都已经失效了,幸好之前我做过保存,可以从此处下载。
声明,此处保存保存的代码仅为方便个人研究学习使用,严禁用于商业用途,如产生任何问题,与本人无关。
效果

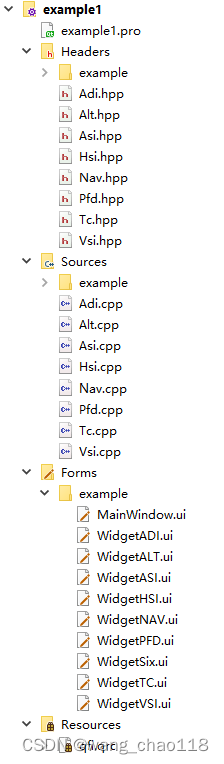
工程文件夹内文档结构如下图所示
mainwindow.cpp
#include <iostream>
#include <cmath>
#include "MainWindow.hpp"
#include "ui_MainWindow.h"
MainWindow::MainWindow(QWidget* parent) : QMainWindow(parent), m_ui(new Ui::MainWindow)
{
m_ui->setupUi(this);
m_timerId = startTimer(0);
m_time.start();
}
MainWindow::~MainWindow()
{
std::cout << "Average time step: " << static_cast<double>(m_realTime / m_steps) << " s" << std::endl;
if ( m_timerId ) killTimer( m_timerId );
if ( m_ui ) { delete m_ui; m_ui = nullptr; }
}
void MainWindow::timerEvent(QTimerEvent* event)
{
QMainWindow::timerEvent( event );
const float timeStep{static_cast<float>(m_time.restart())};
m_realTime = m_realTime + timeStep / 1000.0f;
float alpha{};
float beta{};
float roll{};
float pitch{};
float heading{};
float slipSkid{};
float turnRate{};
float devH{};
float devV{};
float airspeed{};
float altitude{};
float pressure{28.0f};
float climbRate{};
float machNo{};
float adf{};
float dme{};
if ( m_ui->pushButtonAuto->isChecked() ) {
alpha = 20.0f * std::sin( m_realTime / 10.0f );
beta = 15.0f * std::sin( m_realTime / 10.0f );
roll = 180.0f * std::sin( m_realTime / 10.0f );
pitch = 90.0f * std::sin( m_realTime / 20.0f );
heading = 360.0f * std::sin( m_realTime / 40.0f );
slipSkid = 1.0f * std::sin( m_realTime / 10.0f );
turnRate = 7.0f * std::sin( m_realTime / 10.0f );
devH = 1.0f * std::sin( m_realTime / 20.0f );
devV = 1.0f * std::sin( m_realTime / 20.0f );
airspeed = 125.0f * std::sin( m_realTime / 40.0f ) + 125.0f;
altitude = 9000.0f * std::sin( m_realTime / 40.0f ) + 9000.0f;
pressure = 2.0f * std::sin( m_realTime / 20.0f ) + 30.0f;
climbRate = 650.0f * std::sin( m_realTime / 20.0f );
machNo = airspeed / 650.0f;
adf = -360.0f * std::sin( m_realTime / 50.0f );
dme = 99.0f * std::sin( m_realTime / 100.0f );
m_ui->spinBoxAlpha->setValue(alpha);
m_ui->spinBoxBeta->setValue(beta);
m_ui->spinBoxRoll->setValue(roll);
m_ui->spinBoxPitch->setValue(pitch);
m_ui->spinBoxSlip->setValue(slipSkid);
m_ui->spinBoxTurn->setValue(turnRate);
m_ui->spinBoxDevH->setValue(devH);
m_ui->spinBoxDevV->setValue(devV);
m_ui->spinBoxHead->setValue(heading);
m_ui->spinBoxSpeed->setValue(airspeed);
m_ui->spinBoxMach->setValue(machNo);
m_ui->spinBoxAlt->setValue(altitude);
m_ui->spinBoxPress->setValue(pressure);
m_ui->spinBoxClimb->setValue(climbRate);
m_ui->spinBoxADF->setValue(adf);
m_ui->spinBoxDME->setValue(dme);
} else {
alpha = static_cast<float>(m_ui->spinBoxAlpha->value());
beta = static_cast<float>(m_ui->spinBoxBeta->value());
roll = static_cast<float>(m_ui->spinBoxRoll->value());
pitch = static_cast<float>(m_ui->spinBoxPitch->value());
heading = static_cast<float>(m_ui->spinBoxHead->value());
slipSkid = static_cast<float>(m_ui->spinBoxSlip->value());
turnRate = static_cast<float>(m_ui->spinBoxTurn->value());
devH = static_cast<float>(m_ui->spinBoxDevH->value());
devV = static_cast<float>(m_ui->spinBoxDevV->value());
airspeed = static_cast<float>(m_ui->spinBoxSpeed->value());
pressure = static_cast<float>(m_ui->spinBoxPress->value());
altitude = static_cast<float>(m_ui->spinBoxAlt->value());
climbRate = static_cast<float>(m_ui->spinBoxClimb->value());
machNo = static_cast<float>(m_ui->spinBoxMach->value());
adf = static_cast<float>(m_ui->spinBoxADF->value());
dme = static_cast<float>(m_ui->spinBoxDME->value());
}
m_ui->widgetPFD->setFlightPathMarker(alpha, beta);
m_ui->widgetPFD->setRoll(roll);
m_ui->widgetPFD->setPitch(pitch);
m_ui->widgetPFD->setSlipSkid(slipSkid);
m_ui->widgetPFD->setTurnRate(turnRate / 6.0f);
m_ui->widgetPFD->setDevH(devH);
m_ui->widgetPFD->setDevV(devV);
m_ui->widgetPFD->setHeading(heading);
m_ui->widgetPFD->setAirspeed(airspeed);
m_ui->widgetPFD->setMachNo(machNo);
m_ui->widgetPFD->setAltitude(altitude);
m_ui->widgetPFD->setPressure(pressure);
m_ui->widgetPFD->setClimbRate(climbRate / 100.0f);
m_ui->widgetNAV->setHeading(heading);
m_ui->widgetNAV->setHeadingBug(0.0f);
m_ui->widgetNAV->setCourse(0.0f);
m_ui->widgetNAV->setBearing(adf, true);
m_ui->widgetNAV->setDeviation(devH, true);
m_ui->widgetNAV->setDistance(dme, true);
m_ui->widgetSix->setRoll(roll);
m_ui->widgetSix->setPitch(pitch);
m_ui->widgetSix->setAltitude(altitude);
m_ui->widgetSix->setPressure(pressure);
m_ui->widgetSix->setAirspeed(airspeed);
m_ui->widgetSix->setHeading(heading);
m_ui->widgetSix->setSlipSkid(slipSkid * 15.0f);
m_ui->widgetSix->setTurnRate(turnRate);
m_ui->widgetSix->setClimbRate(climbRate);
m_ui->widgetPFD->update();
m_ui->widgetNAV->update();
m_ui->widgetSix->update();
m_steps++;
}
资源下载
本次实验全部代码请至此处下载。


















 510
510

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











