



 本文介绍了使用Wireshark分析网络通信协议,通过实验确定聊天程序采用UDP协议,并展示了如何使用C语言实现Modbus协议,从云端服务器读取温湿度数据。文中还涉及到STM32和AHT20模块,构建了一个Modbus接口的温湿度Slave设备。
本文介绍了使用Wireshark分析网络通信协议,通过实验确定聊天程序采用UDP协议,并展示了如何使用C语言实现Modbus协议,从云端服务器读取温湿度数据。文中还涉及到STM32和AHT20模块,构建了一个Modbus接口的温湿度Slave设备。
一、网络协议深入了解。练习wireshark抓取网络数据包。在两台的电脑(笔记本电脑win10 主机与ubuntu虚拟机。网卡选择桥接模式,可得到两个子网IPv4地址)上运行 “疯狂聊天室”程序,通过wireshark抓包:
1)分析此程序网络连接采用的是哪种协议(TCP、UDP)和什么端口号?
2)试着在抓取包中找到窃取到的聊天信息 (英文字符和汉字可能经过了某种编码转换,数据包中不是明文)
3)如果是网络连接采取的是TCP,分析其建立连接时的3次握手,断开连接时的4次握手;如果是UDP,解释该程序为何能够在多台电脑之间(只有是同一个聊天室编号)同时传输聊天数据?
网络协议指的是计算机网络中互相通信的对等实体之间交换信息时所必须遵守的规则的集合。对等实体通常是指计算机网络体系结构中处于相同层次的信息单元。一般系统网络协议包括五个部分:通信环境,传输服务,词汇表,信息的编码格式,时序、规则和过程。
网络协议是由三个要素组成:
(1) 语义。语义是解释控制信息每个部分的意义。它规定了需要发出何种控制信息,以及完成的动作与做出什么样的响应。
(2) 语法。语法是用户数据与控制信息的结构与格式,以及数据出现的顺序。
(3) 时序。时序是对事件发生顺序的详细说明。(也可称为“同步”)。
计算机网络体系结构的通信协议划分为七层,自下而上依次为:物理层(Physics Layer)、数据链路层(Data Link Layer)、网络层(Network Layer)、传输层(Transport Layer)、会话层(Session Layer)、表示层(Presentation Layer)、应用层(Application Layer)。
网络协议使网络上各种设备能够相互交换信息。常见的协议有:TCP/IP协议、IPX/SPX协议、NetBEUI协议等。
一、建立自己的房间
双击crazychat.exe,创建聊天室

二、更改适配器设置
留下连接的网络,禁用其他网关。
控制面板->网络和Internet->网络和共享中心->更改适配器设置
三、成功发送消息

四、wireshark抓包
1、在聊天室发送一条消息

2、在wireshake中找到,可以看到 Ip address为广播地址255.255.255.255。

双击打开后可以看到端口号和发送的信息明文显示及字节编码。

3、筛选
由上述实验操作可以得知是通过广播方式向其他电脑发送数据,就可以使用筛选器将目的地址设为255.255.255.255,在过滤器框内输入ip.addr==255.255.255.255即可筛选出来所有发送的信息。
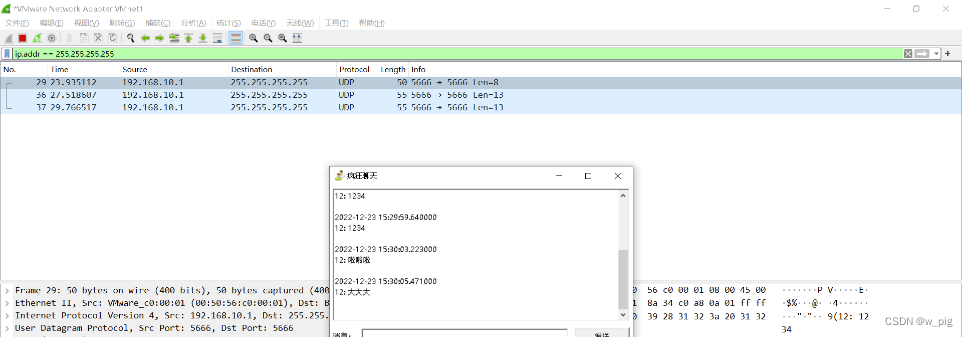
可以看出数据包中的文字不是明文。
总结
由筛选出来的抓包文件可以看出,软件使用的协议是UDP。发送消息的方式是使用广播。
二、在消化学习 server.c和client.c 套接字代码、python-modbus-over-tcp.py 代码基础上,试着用C编程完成modbus协议,从云端服务器读取温湿度数据。
一、Modbus协议简单介绍
(1)Modbus简单概述
Modbus协议是一种串行通信协议,是Modicon公司(现在的施耐德电气Schneider Electric)于1979年为使用可编程逻辑控制器(PLC)通信而发表的。Modbus协议是应用层协议,已经成为工业领域通信协议的业界标准,是工业电子设备之间常用的连接方式。
Modbus是一个master/slave架构的协议,有一个节点是master节点,其他使用Modbus协议参与通信的节点是slave节点,每一个slave设备都有一个唯一的地址。只有被指定为master节点的节点可以启动一个命令。所有的Modbus数据帧包含了校验码,保证传输的正确性。基本的ModBus命令能指令一个slave设备改变它的寄存器的某个值,控制或者读取一个I/O端口,以及指挥设备回送一个或者多个其寄存器中的数据。
(2)Modbus主/从协议原理
Modbus串行链路协议是一个主-从协议。在同一时间,只能将一个主站连接到总线,将一个或多个从站(最大数量为247)连接到相同的串行总线。Modbus 通讯总是由主站发起,当从站没有收到来自主站的请求时,将不会发送数据。主站同时只能启动一个Modbus事务处理,从站之间不能相互通信。
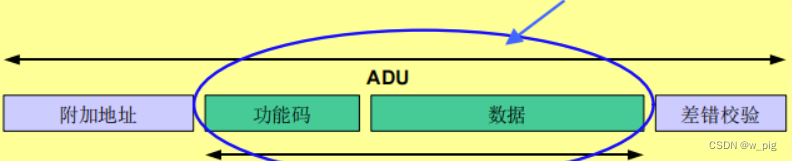
(3)Modbus协议数据单元
Modbus协议定义了一个与基础通信层无关的简单协议数据单元(PDU),特定总线或网络上的Modbus协议映射能够在应用数据单元(ADU)上引入一些附加域。
(4)Modbus串行传输协议
RTU模式:每个8 Bit字节包含两个4 Bit的十六进制字符,其优点是在同样的波特率下,可比ASCII方式传送更多的数据,但是每个信息必须以连续的数据流传输。(等下我们要使用的传输协议)

ASCII模式:信息中的每个8 Bit字节需2个ASCII字符,其优点是准许字符的传输间隔达到1s 而不产生错误;
ModbusTCP通信结构
Modbus TCP/IP的通信设备:连接至TCP/IP网络的
Modbus TCP/IP客户机和服务器设备。
互连设备,如:在TCP/IP网络和串行链路子网之间互连的网桥、路由器或网关等设备。
二、c语言完成modbus协议从云端服务器读取信息
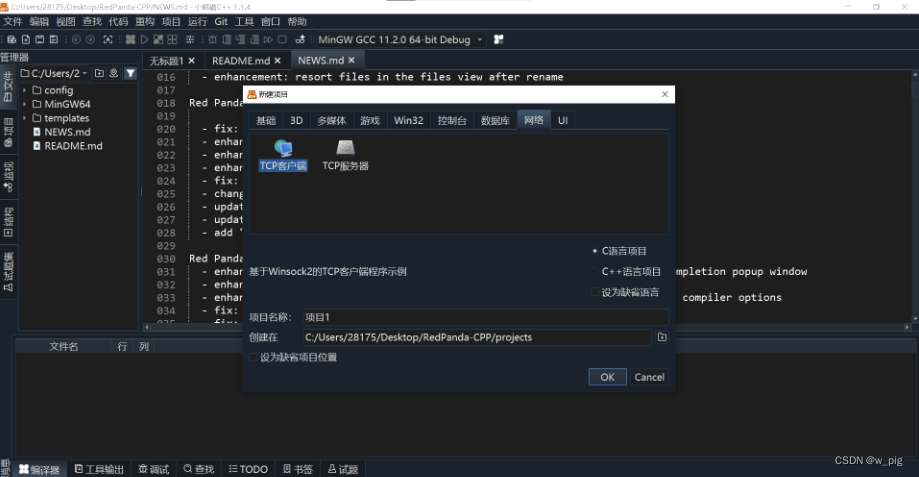
(1)TCP方式请求数据
新建一个TCP客户端项目
初始化socket dll,通过IP连接服务器对应端口
// 初始化socket dll。
WORD winsock_version = MAKEWORD(2,2);
WSADATA wsa_data;
if (WSAStartup(winsock_version, &wsa_data) != 0) {
printf(“Failed to init socket!\n”);
return 1;
}
SOCKET client_socket = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP);
if (client_socket == INVALID_SOCKET) {
printf("Failed to create server socket!\n");
return 2;
}
struct sockaddr_in server_addr;
server_addr.sin_family = AF_INET;
server_addr.sin_port = htons(PORT);
server_addr.sin_addr.S_un.S_addr = inet_addr(SERVER_IP);
if (connect(client_socket, (LPSOCKADDR)&server_addr, sizeof(server_addr)) == SOCKET_ERROR) {
printf("Failed to connect server: %ld !\n", GetLastError());
return 3;
}
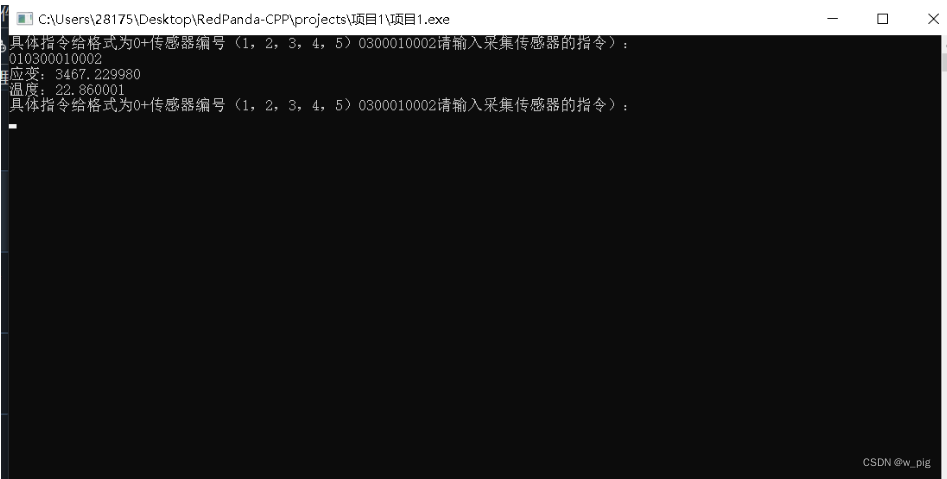
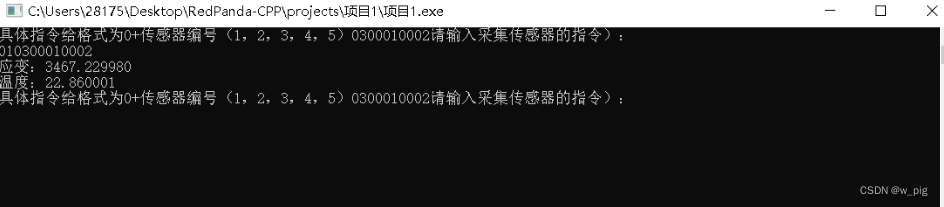
3.输入指令格式
uint8_t data[length_8];
printf("具体指令给格式为0+传感器编号(1,2,3,4,5)0300010002");
printf("请输入采集传感器的指令):\r\n");
scanf("%s",data);
4.生成将输入指令转化为hex格式并生成crc16校验码
uint16_t crc;
unsigned char * cmd;
char crc1[8];
cmd = fromhex(data);
crc = CRC_16(cmd);
uint8_t a = 0xFF;
for(int i=0;i<6;i++){
//TODO
crc1[i] = cmd[i];
}
crc1[6] = a & crc;
crc1[7] = (crc >> 8) & a;
去校验码低位和高位组成2byte的crc16校验位
对应的fromhex函数和crc16校验码生成函数CRC_16会在后面给出
5.发送,接收数据并使用wireshark对发送数据进行抓包分析
if (send(client_socket, crc1, 8, 0) < 0) {
printf(“Failed to send data!\n”);
break;
}
int ret = recv(client_socket, recv_data, BUFFER_SIZE, 0);
if (ret < 0) {
printf("Failed to receive data!\n");
break;
}
recv_data[ret]=0; // correctly ends received string
char yb[4],wd[4];
for(int i=0;i<4;i++){
//TODO
yb[i] = recv_data[4+i];
wd[i] = recv_data[8+i];
}
float mic = hexToDec(yb)/100.0;
float strain_temp = hexToDec(wd)/100.0;
printf("应变:%f\r\n",mic);
printf("温度:%f\r\n",strain_temp);
// printf(“Receive data from server: “%x”\n”,recv_data);
if (strcmp(data,kExitFlag)==0) {
printf(“Exit!\n”);
break;
}
添加过滤信息(ip.dst ==123.56.90.74 and ip.src == 192.168.1.115) or (ip.dst ==192.168.1.115 and ip.src == 123.56.90.74) 只显示服务器发送回来的包以及发送过去的包
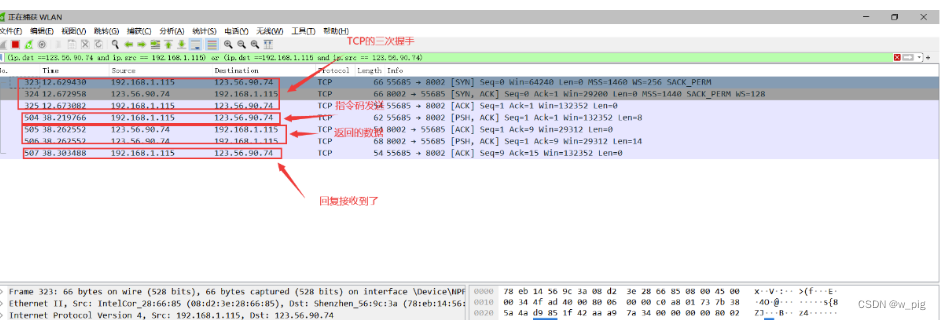
(3)运行结果
2)、实验总结
通过本次实验主要是了解和使用Modbus通讯协议进行各种传感器之间的串行通讯。
三、用stm32最小核心板+AHT20模块,完成一modbus接口的温湿度Slave设备,能够让上位机PC通过modbus协议获取温湿度。主程序采用多任务框架,比如RT-thread Nano。
一、代码
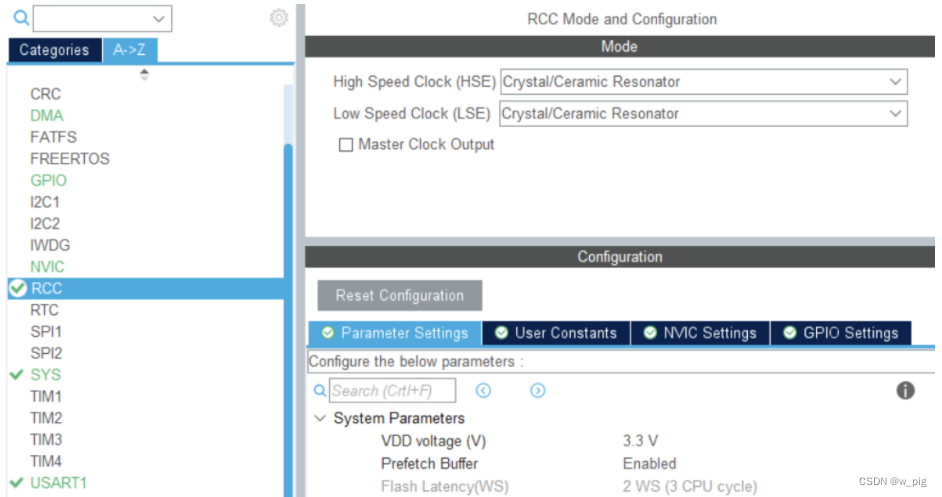
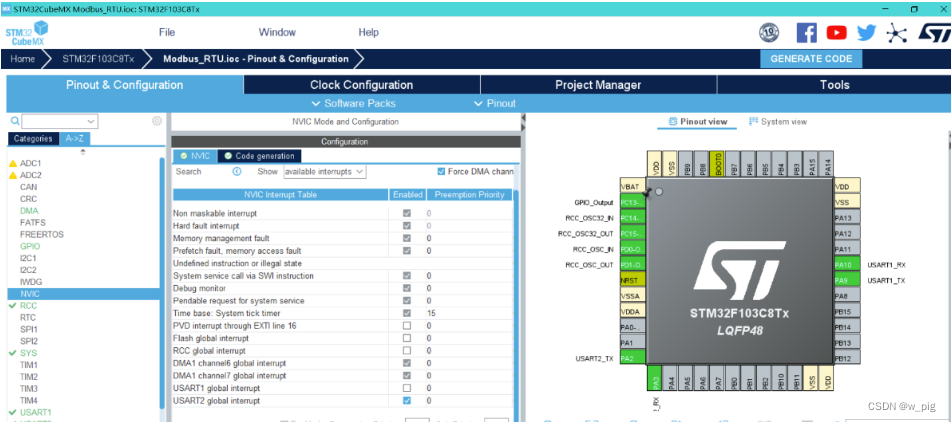
1.通过CubeMX配置stm32
配置RCC
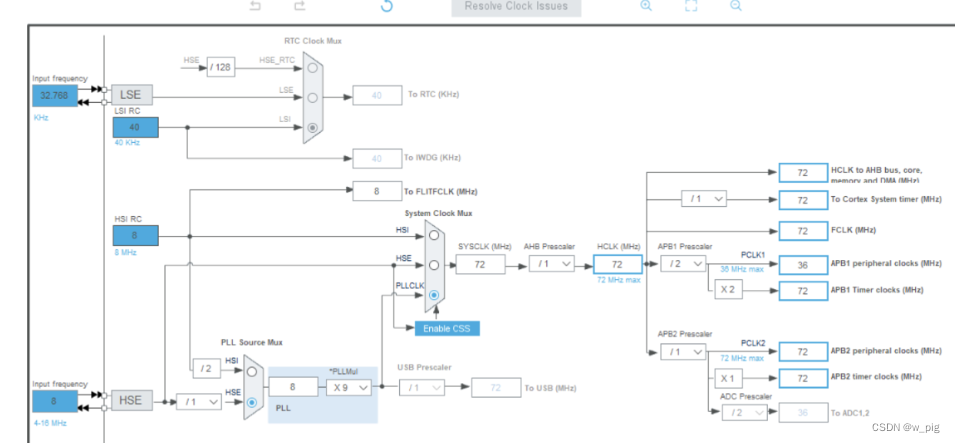
配置时钟
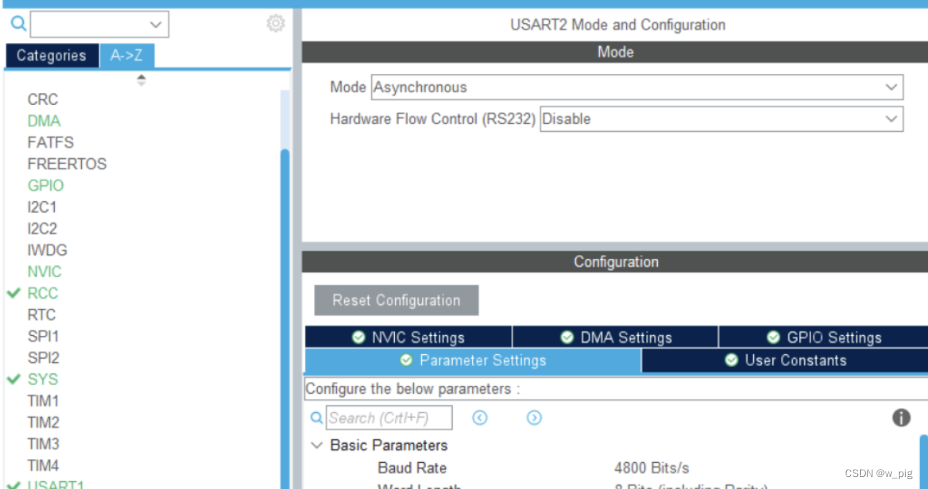
配置串口二波特率4800
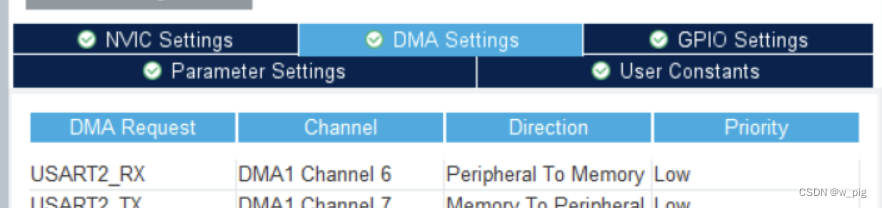
配置串口二DMA
配置中断
2.主要代码
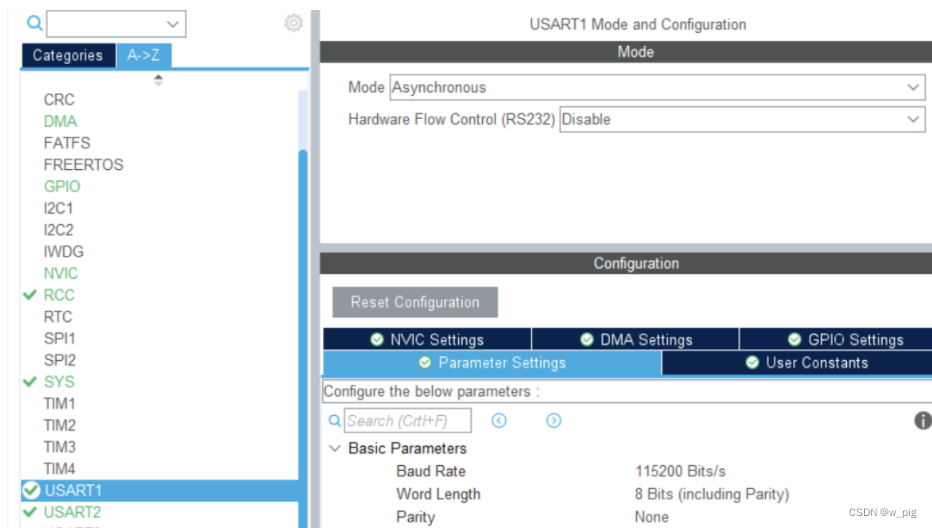
重定向输出串口一
usart.c
#include <stdio.h>
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xFFFF);
//等待发送结束
while(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_TC)!=SET){
}
return ch;
}
添加中断处理
stm32f1xx_it.c的串口2中断处理函数
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
uint32_t tmp = 0;
tmp =__HAL_UART_GET_FLAG(&huart2,UART_FLAG_IDLE); //获取IDLE标志位
if((tmp != RESET))//idle标志被置位
{
//清除标志位
//__HAL_UART_CLEAR_IDLEFLAG(&huart2);
//清除状态寄存器SR,读取SR寄存器可以实现清除SR寄存器的功能
huart2.Instance->SR;
//读取数据寄存器中的数据
huart2.Instance->DR;
HAL_UART_DMAStop(&huart2); //
// 获取DMA中未传输的数据个数
dataLength=hdma_usart2_rx.Instance->CNDTR;
// 接受完成
isDataEnd = 1;
//清除标志位
__HAL_UART_CLEAR_IDLEFLAG(&huart2);
}
/* USER CODE END USART2_IRQn 0 /
HAL_UART_IRQHandler(&huart2);
/ USER CODE BEGIN USART2_IRQn 1 */
/* USER CODE END USART2_IRQn 1 */
}
main.c
添加变量
extern DMA_HandleTypeDef hdma_usart2_rx;
//modbus问询帧
uint8_t commands[3][8]={
{0x01,0x03,0x00,0x00,0x00,0x02,0xC4,0x38},
{0x02,0x03,0x00,0x00,0x00,0x02,0xC4,0x38},
{0x03,0x03,0x00,0x00,0x00,0x02,0xC5,0xE9},
};
//modbus应答帧
uint8_t dataBuff[20];
//中断完成标志
uint8_t isDataEnd=0;
//应答帧长度
uint8_t dataLength;
//温度
uint16_t temperature;
//湿度
uint16_t humidity;
main函数
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_DMA_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
//使能idle中断
__HAL_UART_ENABLE_IT(&huart2, UART_IT_IDLE);
//打开串口DMA接收
HAL_UART_Receive_DMA(&huart2,dataBuff,sizeof(dataBuff));
//传感器地址
uint8_t i=0;
while (1)
{
//中断完成,解析应答帧
if(isDataEnd){
//提取湿度
humidity=(dataBuff[3] << 8) + (dataBuff[4]);
//提取温度
temperature=(dataBuff[5] << 8) + (dataBuff[6]);
//串口一发送解析结果
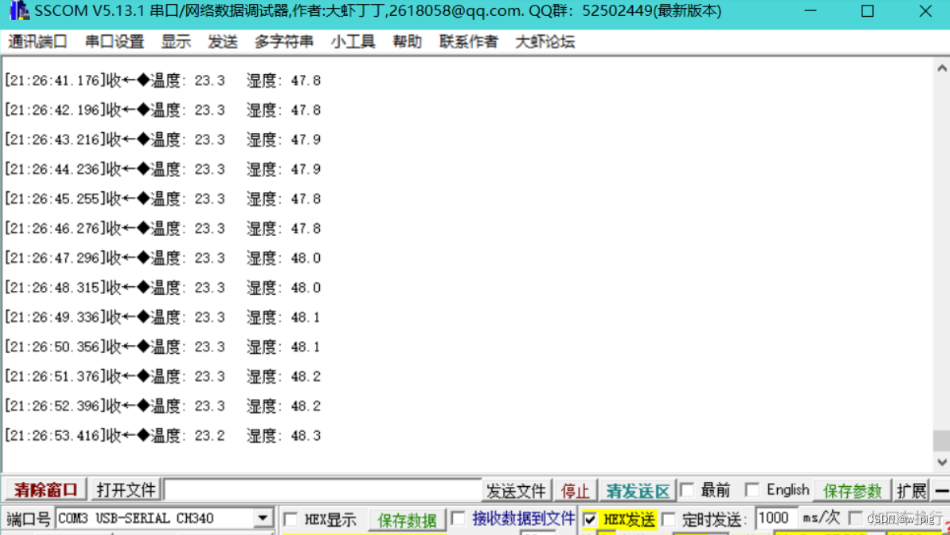
printf("温度: %.1f\t 湿度: %.1f\r\n",temperature/10.0,humidity/10.0);
memset(dataBuff,0,sizeof(dataBuff));//清空接收数组
isDataEnd=0;//清除接收结束标志位
}
//发送第 i 个传感器的 modbus 问询帧
HAL_UART_Transmit(&huart2,commands[i],sizeof(commands),0xFFFF);
//轮询读取三个传感器
i=(i+1)%3;
//打开串口DMA接收
HAL_UART_Receive_DMA(&huart2,dataBuff,sizeof(dataBuff));
//程序运行标志,闪灯
HAL_Delay(1000);
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_13);
}
二、效果
三、总结
这里只是简单的采用了静态指令进行访问数据,没有使用CRC校验。当采用动态指令的时候需要对编号进行自增以及对数据进行CRC校验,并且还需要对各种错误进行解析以及判断。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









