






为什么项目总在“救火”?为什么上线前才发现不合规?根源在于:治理、执行与监督的割裂。
你是否经常面临以下困境:
-
决策层:制定了清晰的科技战略,却在项目落地时走样,战略目标与项目成果脱节。
-
执行层:项目进度卡得精准,却因突发的安全漏洞或合规问题被迫停滞、返工,成本激增。
-
监督层:日常风险登记与监管检查需求“两张皮”,检查前临时补材料,疲于奔命。
这些问题的根源,并非某个团队或个人的失职,而是科技治理、项目管理和风险合规三者处于“割裂”状态。治理定了“方向”却未嵌入项目“执行”,项目追了“进度”却忽略了合规“底线”,合规补了“漏洞”却未跟上治理“目标”。

本文将探讨如何构建一个 “三位一体”的现代风险管理体系,让这三者同频共振,从“成本中心”转变为驱动业务稳健发展的“核心竞争力”。
一、 为什么必须“三位一体”?—— 从被动响应到主动赋能
传统风险管理模式往往是被动和孤立的,如同“铁路警察,各管一段”。而现代企业的科技风险是系统性的,必须采用一体化的思路:
-
对科技治理(定规则)而言,一体化意味着战略目标不再是空中楼阁,而是能通过具体项目落地,并可衡量、可追溯。
-
对项目管理(抓执行)而言,一体化意味着将风险与合规要求前置,减少后期返工,保障项目按时、按质、按预算交付。
-
对风险合规(强监督)而言,一体化意味着将监管要求“翻译”成项目语言,融入日常流程,使“应对检查”变为“常态化管理”。
核心价值:降本提效与合规安全。通过一体化管理,最大限度地减少因风险失控和合规问题导致的返工、罚款和声誉损失,让科技投资回报率最大化。
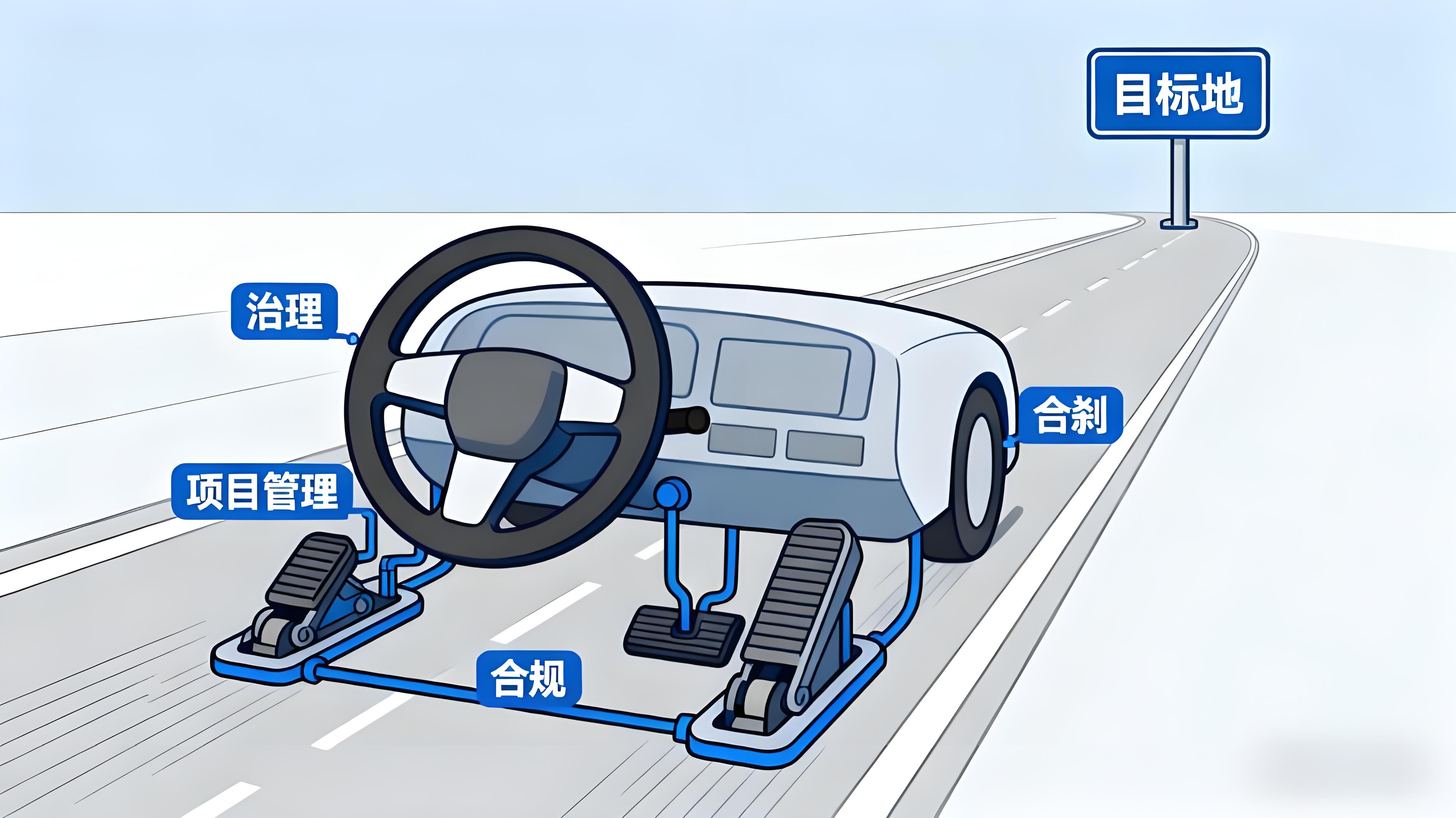
二、 核心逻辑:方向盘、油门与刹车的协同
我们可以用一个生动的比喻来理解三者的关系:
-
科技治理是“方向盘”:设定目标、划定边界、分配资源。它回答“我们去哪里”以及“什么能做、什么不能做”。
-
项目管理是“油门”:负责高效执行,驱动项目向目标推进。它关注“怎么去”以及“如何更快、更省地到达”。
-
风险合规是“刹车”:确保行车安全,防范超速、闯红灯等风险。它负责“别出事”以及“如何合规地到达”。
一辆车要安全高效地抵达目的地,三者缺一不可。统一风险管理,就是让这三套系统实现数据联动和协同控制。
三、 落地“三步走”:从框架到实操
构建“三位一体”体系无需推倒重来,关键在于在现有流程中做“嵌入式”整合。
第一步:顶层对齐——将治理目标与合规要求转化为项目基准
在项目立项前,就应完成战略与合规的对齐。
-
动作:建立 《监管-治理-项目》映射表。将监管条款(如《数据安全法》)和内部治理目标(如“全面上云”),拆解为项目必须遵守的具体要求。
-
示例:治理目标“客户数据零泄露” + 监管要求“个人信息出境需评估” = 项目基准“所有涉及数据的项目,需在需求文档中明确数据分类、加密方式及出境评估流程”。
-
-
产出:一份所有项目通用的 《风险合规检查清单》 ,作为项目启动的“准生证”。
第二步:项目全周期嵌入——让风险管理“跟着项目走”
将第一步的基准和要求,嵌入项目管理的每个关键阶段。
-
需求阶段:联合合规、安全团队,基于《检查清单》识别本项目特定风险,形成 《项目风险登记册》。
-
开发测试阶段:将合规要求转化为具体的测试用例(如“验证身份证号是否脱敏”)。在CI/CD管道中设置合规门禁,未通过则无法合并代码。
-
发布阶段:引入 “合规冻结” 机制。打版同时,将所有需求、代码、测试报告、合规证据固化到不可篡改的制品库,生成审计报告。
-
运维与复盘阶段:持续监控风险指标(如日志丢失率)。项目结束后,输出 《三位一体复盘报告》 ,沉淀经验至组织过程资产。
第三步:工具与文化——让一体化“转起来”
-
工具选型:选择支持自定义字段、可视化看板、工作流引擎的工具(如维普时代、Jira、Asana)。核心是实现 “风险卡片”与“任务卡片”的关联,让风险状态、责任人、应对措施一目了然。
-
文化塑造:
-
建立跨部门责任制:每个项目明确治理、项目、合规责任人。
-
赋能团队:让一线开发、测试人员理解“为什么需要合规”,而不仅仅是“做什么”。
-
领导驱动:CIO及高层需在评审、巡检等环节亲自推动,彰显决心。
-
四、 给管理者的避坑指南
-
误区一:工具越复杂越好
-
正解:工具贵在“适用”,而非“强大”。先从轻量级工具开始,重点配置好“监管字段”和“风险工作流”,避免因操作复杂而遭团队抵触。
-
-
误区二:将“一体化”变为“流程叠加”
-
正解:追求 “嵌入式”而非“叠加式” 。例如,将“合规评审”与“技术评审”合并,一份材料,一次会议,避免重复劳动。
-
-
误区三:科技与合规“各唱各的调”
-
正解:强制要求合规团队前置参与。例如,规定所有“风险卡片”需经合规专员确认,确保监管要求不漏项。
-
结语:让风险管理成为企业的“免疫系统”
在充满不确定性的时代,卓越的风险管理能力不再是可选项,而是企业生存与发展的基石。构建“三位一体”的统一风险管理体系,本质上是为组织安装一个强大的“免疫系统”——它不仅能帮助企业抵御外部的监管冲击和风险威胁,更能内化为一种高效协作、稳健运营的组织能力。



















 73
73

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











