



Ubuntu20.04
电脑:ASUS Zenbook Pro 14 OLED
网卡:AX200
GPU: NVIDIA GeForce RTX 4070 Laptop GPU
NVIDIA driver: NVIDIA-SMI 525.125.06
Kernel: 5.15.0-79-generic
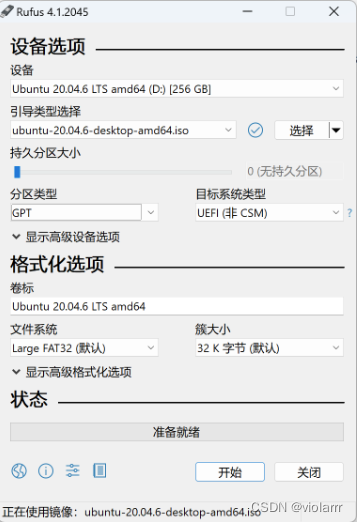
USB 镜像准备
-
创建USB驱动盘
-
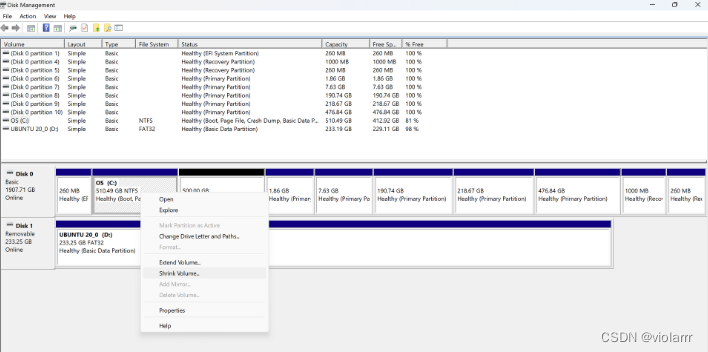
在disk management创建分区: 点击 “Shrink Volume” 创建 Unallocated partition
-
Enter F12 进入BIOS
-
分区
/boot primary ext4 2000MB
swap logical 8192MB
/ logical ext4 204800MB
/usr logical ext4 234792MB
/home logical ext4 500000MB+
Nvidia
-
安装驱动: Software & updates - Addition Drivers - 选择525,安装好后reboot

-
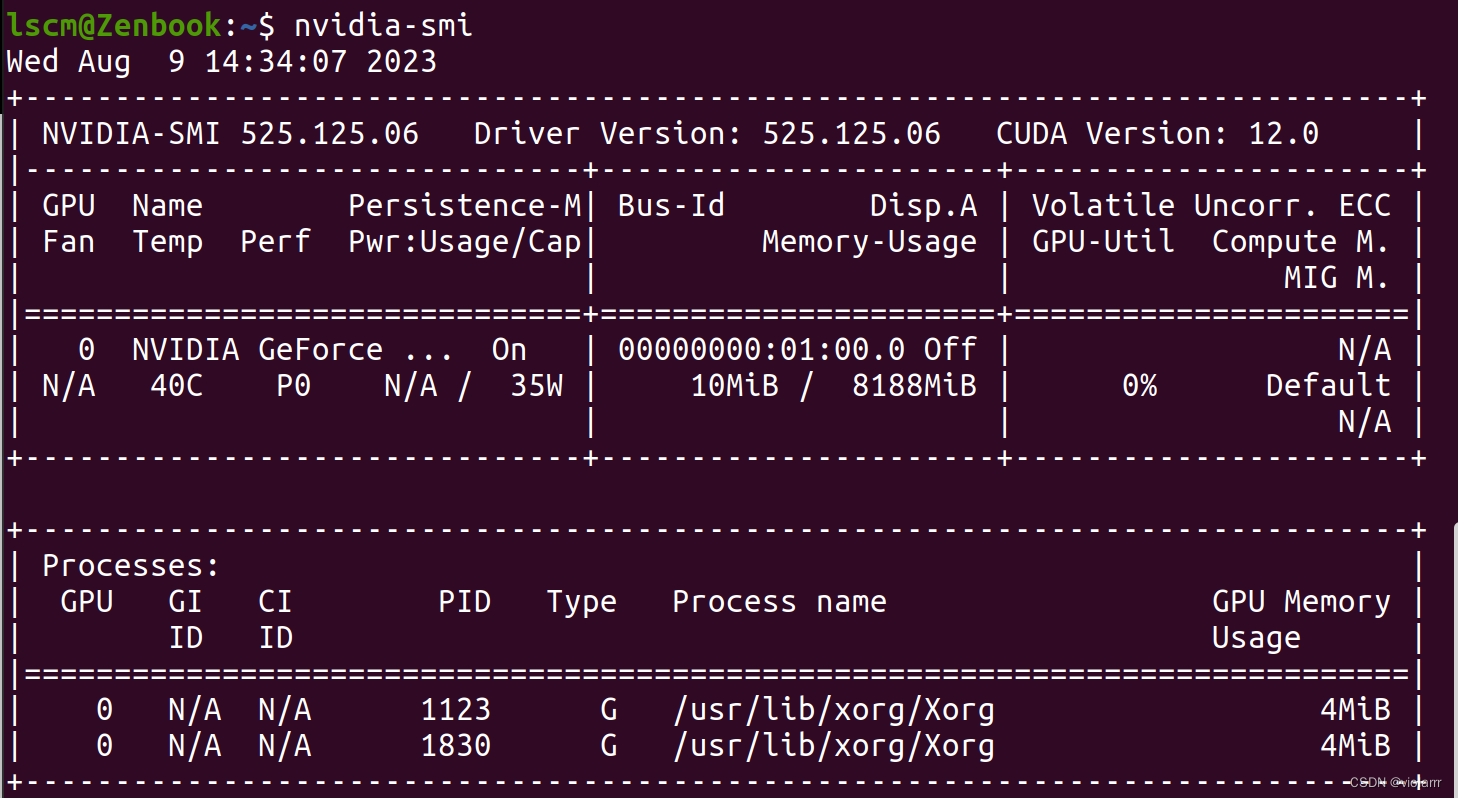
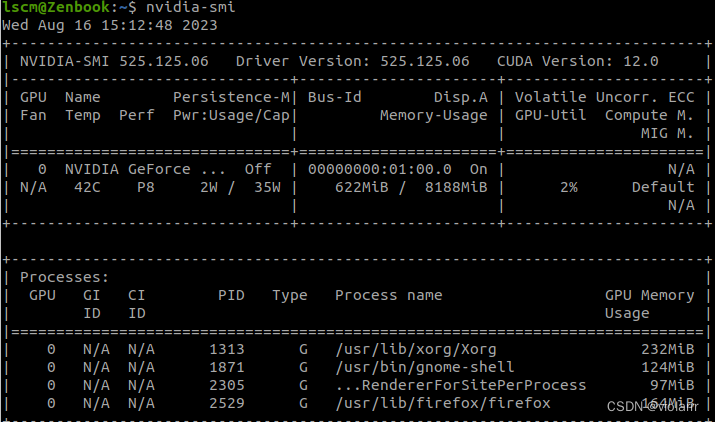
Nvidia-smi:重启后可用此命令查看驱动及GPU情况,可用sudo nvidia-smi -pm 1启用Persistence mode
-
接下来设置外接显示器,暂时检测不到,
xrandr只有screen0,并且显示xrandr: Failed to get size of gamma for output default
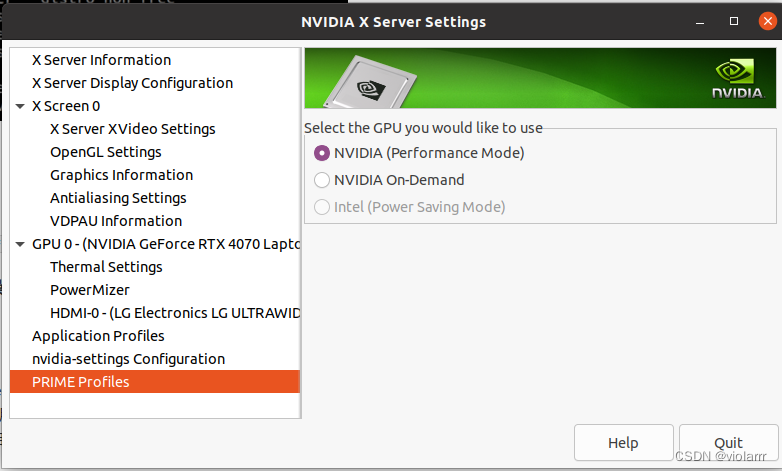
1)设置PRIME Profiles
a.prime-select query: 查询得到当前的结果为on-demand
b.sudo prime-select nvidia: 也可以直接打开nvidia-settings设置为nvidia
2)修改/etc/default/grub,第十行加上nomodeset(一定要这么设置,要不然重启会黑屏)

-
重启
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-LNka0qyh-1692171008780)(:/57e6d3f87aff4883b4785364ff0681cb)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-cJUPNaAu-1692171008781)(:/18343295ba8d433b84859e8d4404d937)]](https://i-blog.csdnimg.cn/blog_migrate/15ac794a4653ad63f63120aeac1d84c1.png)
安装升级python3
Ubuntu20.04自带的python3版本是3.8,需要升级到3.9
Update
sudo apt updatesudo apt upgrade
Add PPA
sudo add-apt-repository ppa:deadsnakes/ppa
install python3.9
sudo apt updatesudo apt install python3.9
exam
python3.9 --version
set default python3.9
查看下面设置链接的部分
install pip3
sudo apt install python3.9-pippip3 --version
WIFI

一开始Ubuntu20.04没有wifi图标
- 安装网卡
sudo apt-get update
sudo apt-get install bcmwl-kernel-source:重启后依然没有 - 针对网卡AX200安装相关驱动
-
sudo apt install flex bison -
git clone https://github.com/intel/backport-iwlwifi.git -
cd backport-iwlwifi/iwlwifi-stack-dev -
sudo make defconfig-iwlwifi-public -
sudo make -
sudo make install -
从intel官网官网链接下载所需固件,下载最新的ax210版本

-
解压出来,将文件复制在/fw-binaries下:
sudo cp iwlwifi-* /backport-iwlwifi/fw-binaries
-
设置中文输入法
Install Required Tools
sudo apt-get install ibus-libpinyin
Chinese Input Configuration
- Open Region and Language. Under Input Sources section, click Add (+) to add new input.
- Select Chinese (China) > Chinese (Intelligent Pinyin) > Add.

设置内核
安装内核
-
uname -r: 查看当前内核版本

-
sudo ubuntu-mainline-kernel.sh -r 5.15: 查询5.15下有哪些内核版本

-
sudo ubuntu-mainline-kernel.sh -i 5.15.0: 安装指定版本的内核 -
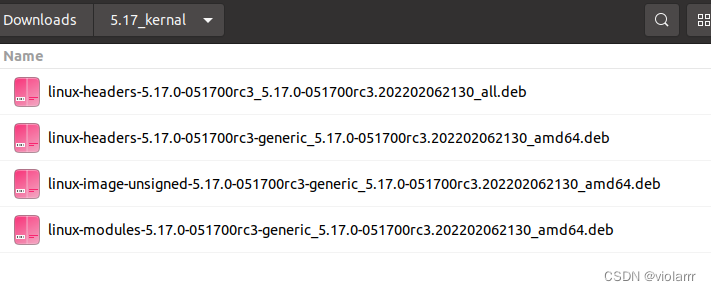
或者去官方下载链接下载内核
两个headers,一个image,一个modules,共四个,在下载好.deb的文件夹打开终端,输入sudo dpkg -i *.deb
卸载内核
自行从源码编译安装的内核无法通过常规途径卸载,需手动删除以下目录的文件。KERNEL_VERSION为要卸载的内核版本
/boot/vmlinuz-KERNEL_VERSION
/bool/initrd.img-KERNEL_VERSION
/boot/config-KERNEL_VERSION
/boot/System.map-KERNEL_VERSION
/lib/modules/KERNEL_VERSION
/var/lib/initramfs-tools/KERNEL_VERSION


















 2991
2991

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









