



光无线通信与光学传感与检测技术在提升自动驾驶场景可靠性与安全性中的应用
引言
光无线通信在应对包括自动驾驶在内的所有网络中与大数据相关的高数据速率需求方面具有巨大潜力。
通过使用光纤激光器,未来应用可获得一种高功率的额外光源。一个有益的副作用是减轻了拥挤的射频波段压力,或通过这些技术的结合来满足带宽需求。事实证明,目前混合系统是最有前景的方法,因为每种技术都有其局限性,而结合使用则能取长补短。为确保定位数据的精度,需要采取支持措施将相关数据传输至车辆。可见光通信(VLC)提供了先进的光通信概念,但仍需进一步研究。与传统使用的 FSO系统相比,车对车可见光通信信道可分为两种不同的链路,即视距(LOS)和非视距(NLOS),见[1],[2]。这两种链路均受到大气效应(如米氏散射和湍流)的影响。因此,光束可能会受到严重干扰,这一事实导致误码率(BER)升高,在设计此类系统时必须考虑这一点[3],[4]。
由于车辆的前大灯和尾灯在近期内不会消失,因此它们除了可用于通信用途外,还能在卫星定位系统无法覆盖的区域(如隧道、城市狭窄的楼宇峡谷)提供精确的位置数据。激光雷达是自动驾驶车辆和传感器应用中的重要技术,利用激光束绘制出周围环境的精确图像。为了实现该技术在工业领域的广泛应用,需要降低其成本。光学解决方案不仅可用于对外通信,也可在车辆内部实现应用。减轻车辆重量以及完全避免电磁干扰是其颇具吸引力的特性。
所有这些示例都表明,光无线通信(OWC)是网络和自动驾驶的重要组成部分。并非所有系统目前都适用于大众市场,仍需进行研发以满足相关要求。在这方面已迈出重要步骤,且在不久的将来还将有更多进展,以通过光学技术支撑自动驾驶。其应用可扩展至火车、船舶、飞机等。当前及未来的光无线通信及其混合解决方案,包括与5G网络结合用于深空任务的应用将变得越来越重要,并且现在将进一步补充到自动驾驶系统(针对汽车、船舶和飞机,[5])中,通过结合光学和射频波实现感知以及目标、障碍物和邻近系统的检测。
2. 车对车可见光通信信道模型
本节提供了与车对车可见光通信链路相关的详细信道表征。此外,还考虑了在拉斯帕尔马斯理工大学通信技术创新与发展研究所(IDeTIC)构建的真实车对车信道模拟器。通常,车对车可见光通信发射单元是已安装的作为日间行车灯、刹车灯、前后灯和尾灯使用的发光二极管。此外,汽车中用于自动泊车和驾驶图像记录的摄像头也
被视为数据接收申请者。这些优势,加上低成本和高简单性,使可见光通信技术在车对车通信中显得尤为重要。然而,由于大气效应(即米氏散射以及晴空湍流 [3],[4] 1,),自由空间光通信链路可能会严重退化。图中显示了在IDeTIC构建的自主开发的车对车光无线通信系统仿真器的框图。

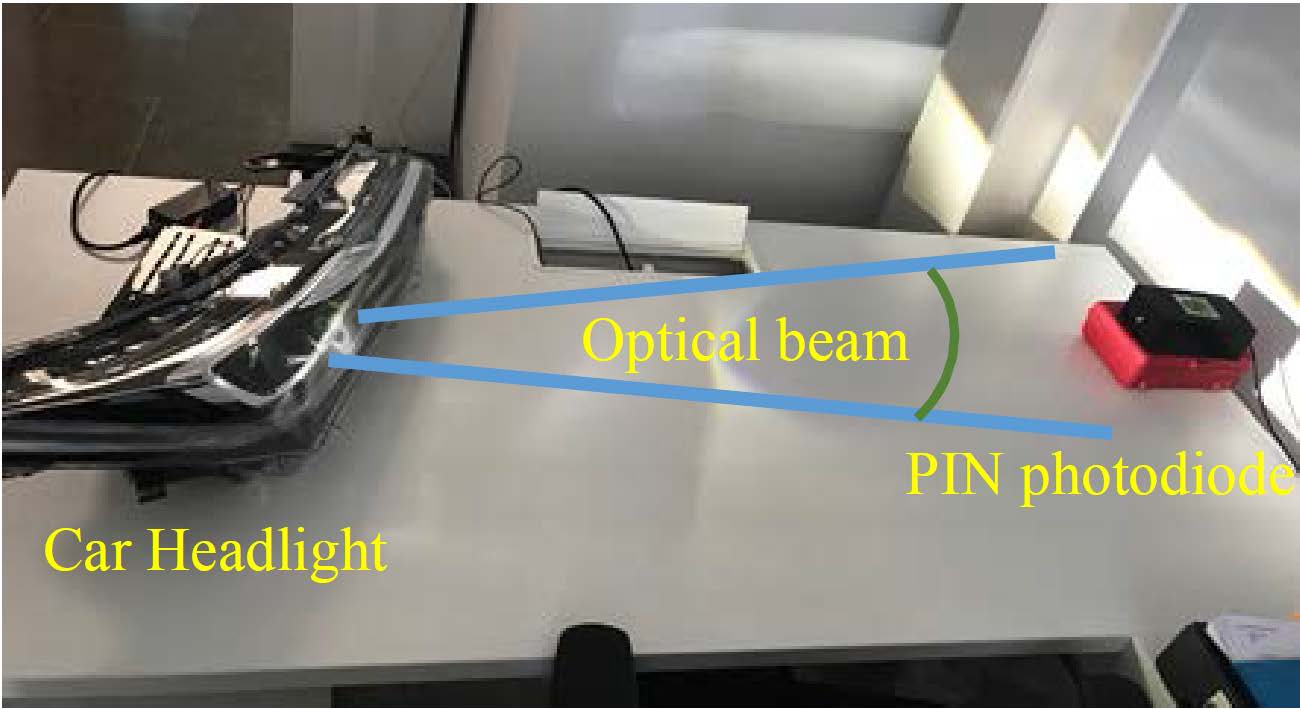
该测试平台用于验证包含接收器和发射器的车载光通信系统。图2展示了所开发的仿真设置的实际视图。在当前的测试平台中,车载计算机仿真器的主要目的是准确表征汽车在精确车辆控制过程中所使用的数据传输与数据处理。一旦数据通过所开发的仿真器进行处理,便会借助汽车前灯转换到光域。一般来说,车辆前大灯是非相干光源,具有较大的发散角,可实现数据传输。
光谱可见部分内的光信号。照明由等坎德拉和等照度图定义。在当前的实验装置中,探测器为PIN光电二极管。如前所述,摄像头也可作为接收器。除了相关硬件外,下一部分将简要介绍所采用的信道表征模型。
| 参数 | Name | Unit |
|---|---|---|
| 前灯的发光强度 | II TTTT( φφ vv, φφ ℎ) | cd |
| 前照灯水平角度 | φφ vv | rad |
| 前照灯垂直角度 | φφ ℎ | rad |
| 发射端与接收端之间的距离 | dTx-Rx | m |
| 接收端与反射区域之间的距离 | dA-Rx | m |
| 方位角(道路) | β | rad |
| 入射角(道路) | γ | rad |
| 入射角LOS(探测器) | Φlos | rad |
| 入射角NLOS(探测器) | Φnlos | rad |
| 发射器高度 | hTx | m |
| 辐射光效 | LER | lm/W |
| 照明道路区域 | S | m² |
| 光电二极管有效有源面积 | Ar | mm² |
| 小尺度涡流 | a | – |
| 大尺度涡流 | b | – |
| 反射系数 | r | – |
| 随机系数(伽马‐伽马) | ht | – |
在车对车光通信中,进行链路表征时必须考虑两种不同的信道。第一种是普通的视距链路。第二种更为有趣,因为它是非视距信道,包含来自路面本身反射的前大灯光学信号。关于道路类型,最重要的参数是定制的反射(r)表,该表取决于特定的天气条件以及路面状况。每种通信场景[1],[2]都需要开发相应的r表。
应用r表后,可根据理论分析推导出的公式(1)计算路面的反射强度。
$$
P_{\text{nlos}} = \int\int_S \frac{r(\beta,\gamma) \cdot I_T(\varphi_v, \varphi_h) \cdot \cos(\Phi_{\text{nlos}})}{d_{\text{Tx-Rx}}^2} dS, \quad \Phi_{\text{nlos}} \leq \Phi_{\text{Rx}}
$$
根据(1),总接收到的非视距链路光功率通过对整个路面进行积分计算,见(2)。此外,根据(2),光电探测器的视场角Φ必须大于非视距的入射角Φnlos,否则非视距对总接收功率的贡献为零。一旦计算出与非视距链路相关的接收功率,接下来需要考虑的是通过视距链路传输的光功率。
$$
P_{\text{los}} = \frac{I_T(\varphi_v, \varphi_h) \cdot A_r}{d_{\text{Tx-Rx}}^2} \cdot \cos(\Phi_{\text{los}})
$$
类似于(2),(3)中的视距光功率仅在LOS入射角Φlos小于光探测器的视场角时才会被接收到。最后,根据(2)和(3),总光功率可通过将(2)和(3)相加得到。随后,必须考虑降低车对车光通信可靠性的不同大气效应(米氏散射和湍流)。米氏散射可分为两种类型,即海洋雾和陆地雾,它们在引起的衰减程度上有所不同。另一个问题是湍流。根据大气湍流单元的大小,可能出现两种不同的效应,即闪烁和光束漂移。更具体地说,在由于强烈太阳辐射导致路面温度较高的区域,这可能成为一个棘手的问题。在高温路面数米上方,可能发生严重的波前畸变,严重影响光信息传输[3],[4]。关于湍流,最著名的辐照度分布是伽马‐伽马分布,见(4)。它能够较好地表示强湍流和弱湍流。
除了湍流外,还考虑了不同的雾况。与米氏散射相关的经验方程,特别是消光系数αe ,在公式(5)中给出。如可见,(5)完全依赖于能见度V,其值可从几十米到几十公里。
$$
\alpha_e =
\begin{cases}
3.91 / V, & V \leq 6\,\text{km} \
1.6 \cdot (550\,\text{nm})^{-q}, & 6\,\text{km} < V < 50\,\text{km} \
0.585 / V^{1/3}, & V > 50\,\text{km}
\end{cases}
$$
总体信道衰减可通过比尔‐朗伯定律轻松计算。基于所介绍的硬件和信道表征,可以对不同的车对车通信场景进行研究。
3. 应用
3.1 网络化
为了充分发挥自动驾驶的潜力,网络化无疑是至关重要的。车辆可配备扩展的信息流,从而实现超越人眼或任何内置传感器所能提供的更高可见性。不同的通信技术为此类网络化提供了基础。
3.2 “车对车”,“车对外”
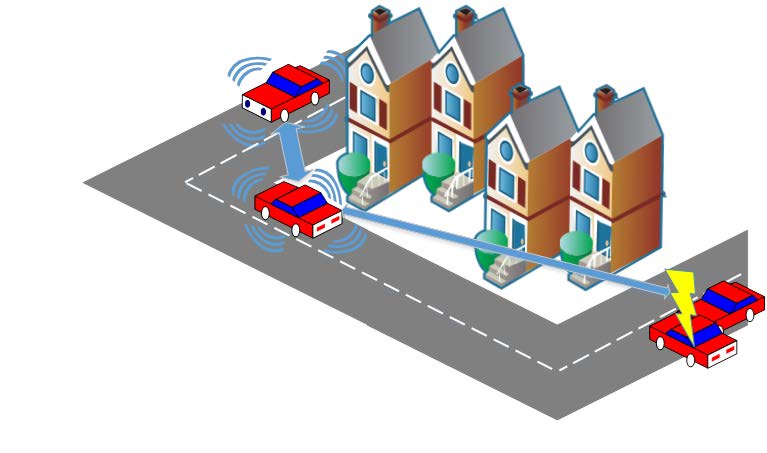
从“车对车”以及“车对‐X”或“车对外”通信这一术语出发,该主题涵盖了车辆与基础设施之间在所有可能组合下的各类信息交换。换句话说,这是一个综合性的消息网络,所有车辆都可以参与其中,并利用这些数据生成“数字地平线”。这些车辆通过无线技术相连接,并向车辆的转向控制(无论是人类驾驶员还是计算机驾驶员)提供重要信息,例如交通中的危险情况。此类信息有助于显著降低发生事故时的潜在损害,甚至完全消除不可避免的事故的发生。“车对外”通过“拐弯处观察”、远距离识别状况或探测和探索未覆盖区域的能力,扩展了现代汽车中众多内置传感器所提供的信息。网络化使得道路状况信息的传递无需处于传感器范围内。刚刚发生的事故信息可以立即发送给附近平行或交叉道路上的道路使用者,如图3所示。
当两辆或更多车辆处于通信范围内时,它们将形成一个无线自组织网络(例如即将推出的Wi‐Fi标准802.11p就是为此设计的),其覆盖范围有限,仅为数百米。每辆参与的车辆同时充当路由器,从而将消息传递给更远的车辆。要使这种多跳拓扑结构正常工作,需要达到汽车数量的临界数量。因此,移动(蜂窝)通信被视为一种补充手段。为了使其正常运行,无线电与光通信的结合可能是一种可行的解决方案,这也可能提高故障安全性。
3.3 激光雷达
为了确保自动驾驶汽车的安全运行,所有内置和通信传感器必须能够可靠地检测、解释和应对不同的交通状况。目前最先进的技术是摄像头、雷达和激光雷达的组合。激光雷达也被称为“激光扫描仪”,与雷达相关,是一种光学方法距离和速度测量。与使用无线电波不同,这里采用激光。这引发了一个完全不同的频段。高频非常有利于对周围环境进行详细的三维记录。在100米距离上实现高达1厘米的分辨率是可行的。LiDAR原理的基础是测量脉冲激光束发射后随时间变化的反射或散射强度。目前,每秒可记录超过两百万次测量的LiDAR系统是自动驾驶领域最精确的数据来源。
然而,需要在车辆中安装大量计算能力,以及笨重的外壳,是其主要缺点之一。LiDAR传感器价格昂贵,单个成本从数千至一万美元不等。麻省理工学院的研究人员取得了一项重大突破,他们开发出一种具备LiDAR功能的芯片,可在普通芯片制造厂进行制造。据称,单芯片成本将降至仅约10美元。[6]
仅安装符合激光1类的LiDAR传感器于车辆中。这一限制是眼睛安全法规的直接结果。扫描仪的发射能量以及对人眼造成的影响的能量足迹决定了这些限制。
3.4 可见光通信
可见光通信为汽车领域提供了一些先进的功能。参见第2章,可通过连接至信息源和调制器的发光二极管传输数据。这些发光二极管可同时用于照明和通信用途。在接收端需要一个探测器,该探测器识别调制光脉冲并恢复调制信息。由于车辆通常配备前大灯和尾灯,因此为这些灯具增加信息传输功能是一个巧妙的想法。在数字系统中,几乎各种类型的数据都可以传输,因此在隧道等全球定位系统无法覆盖的区域通过可见光通信传输定位数据体现了这一巧妙构想。
如果仅将可见光通信用作定位辅助,则无需回传信道(广播),这将实现简单的单向数据传输,并具备使用低成本组件的潜在优势。目前,可见光通信系统在建筑物内能够达到约30厘米的定位精度。该精度应足以满足隧道内的需求,且未来数据精确度很可能进一步提升。需要实现基于卫星的定位与可见光通信等辅助技术之间的无缝切换。
发光二极管也安装在交通信号灯中,可用于维持道路使用者之间的信息流。高优先级的应用场景,如协同前方碰撞预警、用于交通事故检测的传感器以及电子紧急制动灯,具有若干共同条件:所有这些应用场景均要求具备高可靠性,并实现与极低延迟相比的实时可访问性。
4. 结论
已验证光学技术是确保自动驾驶正常运行的关键要素。其潜在的高带宽对于相关实体之间的信息流至关重要。道路使用者之间形成的大型浮动网络可实现前所未有的信息交换,从而形成各自的“数字地平线”。
LiDAR系统对于更高级别的自动化而言必不可少。该技术在系统尺寸、重量和成本方面均有进一步改进的巨大潜力,同时最终精度也可得到提升。可见光通信(VLC)可能成为最重要的辅助技术之一,提高定位数据的精度以及提供信息可能是其部分目的。为实现这些潜在应用,本文提出了一种特定的信道表征方法和硬件配置。在此表征基础上,考虑了包括米氏散射和晴空湍流在内的大气效应。尽管信道侧存在这些限制,VLC作为车辆间可靠的通信技术仍难以被替代。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









