







第一步:准备数据
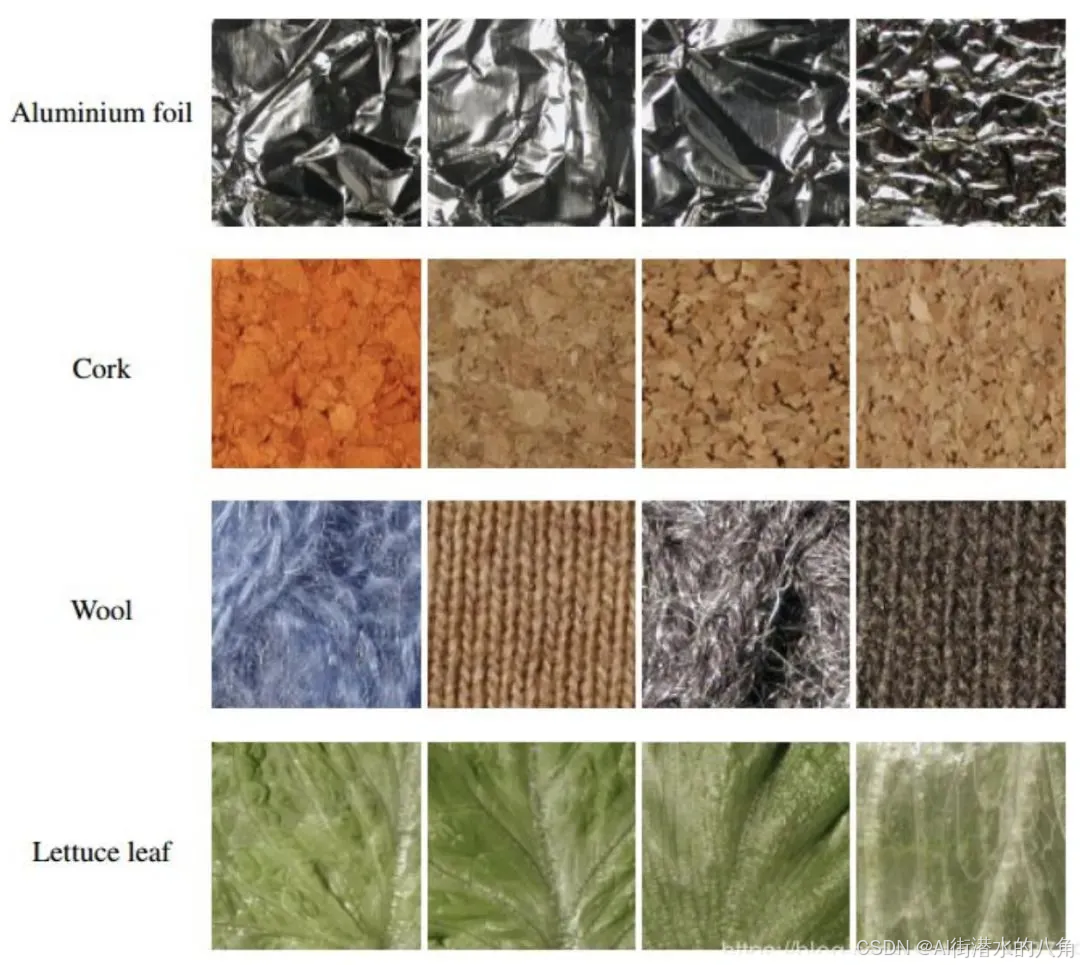
KTH-TIPS 是一个纹理图像数据集,在不同的光照、角度和尺度下拍摄的不同材质表面纹理图片。类型包括砂纸、铝箔、发泡胶、海绵、灯芯绒、亚麻、棉、黑面包、橙皮和饼干共10类。
第二步:搭建模型
本文选择一个MobileNetV4网络,其原理介绍如下:
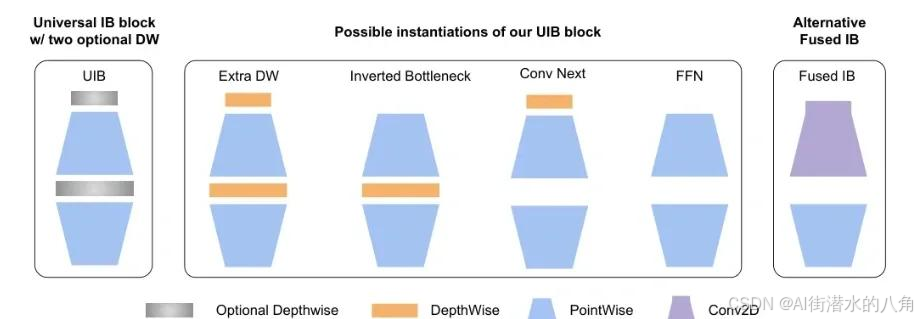
MobileNetV4(MNv4)引入了通用倒置瓶颈(UIB)搜索块,这是一个统一而灵活的结构,融合了倒置瓶颈(IB)、ConvNext、前馈网络(FFN)和一种新颖的额外深度卷积(ExtraDW)变体。除了UIB,还提出了Mobile MQA,这是一个专为移动加速器量身定制的注意力块,提供了显著的39%加速。还介绍了一种经过优化的神经架构搜索(NAS)配方,提高了MNv4搜索的有效性。UIB、Mobile MQA和经过精细调整的NAS配方的整合导致了一套新的MNv4模型,这些模型在移动CPU、DSP、GPU以及专用加速器(如苹果神经引擎和谷歌Pixel EdgeTPU)中大多数情况下都是帕累托最优的,这是其他测试模型中没有的特征。最后,为了进一步提高准确性,引入了一种新颖的蒸馏技术。通过这种技术的增强,MNv4-Hybrid-Large模型在ImageNet-1K准确率达到了87%,在Pixel 8 EdgeTPU上的运行时间仅为3.8ms。
第三步:部分代码
1)损失函数为:交叉熵损失函数
2)模型代码:
from typing import Any, Callable, Dict, List, Mapping, Optional, Tuple, Union
import torch
import torch.nn as nn
import torch.nn.functional as F
from mobilenet.model_config import MODEL_SPECS
def make_divisible(
value: float,
divisor: int,
min_value: Optional[float] = None,
round_down_protect: bool = True,
) -> int:
"""
This function is copied from here
"https://github.com/tensorflow/models/blob/master/official/vision/modeling/layers/nn_layers.py"
This is to ensure that all layers have channels that are divisible by 8.
Args:
value: A `float` of original value.
divisor: An `int` of the divisor that need to be checked upon.
min_value: A `float` of minimum value threshold.
round_down_protect: A `bool` indicating whether round down more than 10%
will be allowed.
Returns:
The adjusted value in `int` that is divisible against divisor.
"""
if min_value is None:
min_value = divisor
new_value = max(min_value, int(value + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if round_down_protect and new_value < 0.9 * value:
new_value += divisor
return int(new_value)
def conv_2d(inp, oup, kernel_size=3, stride=1, groups=1, bias=False, norm=True, act=True):
conv = nn.Sequential()
padding = (kernel_size - 1) // 2
conv.add_module('conv', nn.Conv2d(inp, oup, kernel_size, stride, padding, bias=bias, groups=groups))
if norm:
conv.add_module('BatchNorm2d', nn.BatchNorm2d(oup))
if act:
conv.add_module('Activation', nn.ReLU6())
return conv
class InvertedResidual(nn.Module):
def __init__(self, inp, oup, stride, expand_ratio, act=False, squeeze_excitation=False):
super(InvertedResidual, self).__init__()
self.stride = stride
assert stride in [1, 2]
hidden_dim = int(round(inp * expand_ratio))
self.block = nn.Sequential()
if expand_ratio != 1:
self.block.add_module('exp_1x1', conv_2d(inp, hidden_dim, kernel_size=3, stride=stride))
if squeeze_excitation:
self.block.add_module('conv_3x3', conv_2d(hidden_dim, hidden_dim, kernel_size=3, stride=stride, groups=hidden_dim))
self.block.add_module('red_1x1', conv_2d(hidden_dim, oup, kernel_size=1, stride=1, act=act))
self.use_res_connect = self.stride == 1 and inp == oup
def forward(self, x):
if self.use_res_connect:
return x + self.block(x)
else:
return self.block(x)
class UniversalInvertedBottleneckBlock(nn.Module):
def __init__(self,
inp,
oup,
start_dw_kernel_size,
middle_dw_kernel_size,
middle_dw_downsample,
stride,
expand_ratio
):
"""An inverted bottleneck block with optional depthwises.
Referenced from here https://github.com/tensorflow/models/blob/master/official/vision/modeling/layers/nn_blocks.py
"""
super().__init__()
# Starting depthwise conv.
self.start_dw_kernel_size = start_dw_kernel_size
if self.start_dw_kernel_size:
stride_ = stride if not middle_dw_downsample else 1
self._start_dw_ = conv_2d(inp, inp, kernel_size=start_dw_kernel_size, stride=stride_, groups=inp, act=False)
# Expansion with 1x1 convs.
expand_filters = make_divisible(inp * expand_ratio, 8)
self._expand_conv = conv_2d(inp, expand_filters, kernel_size=1)
# Middle depthwise conv.
self.middle_dw_kernel_size = middle_dw_kernel_size
if self.middle_dw_kernel_size:
stride_ = stride if middle_dw_downsample else 1
self._middle_dw = conv_2d(expand_filters, expand_filters, kernel_size=middle_dw_kernel_size, stride=stride_, groups=expand_filters)
# Projection with 1x1 convs.
self._proj_conv = conv_2d(expand_filters, oup, kernel_size=1, stride=1, act=False)
# Ending depthwise conv.
# this not used
# _end_dw_kernel_size = 0
# self._end_dw = conv_2d(oup, oup, kernel_size=_end_dw_kernel_size, stride=stride, groups=inp, act=False)
def forward(self, x):
if self.start_dw_kernel_size:
x = self._start_dw_(x)
# print("_start_dw_", x.shape)
x = self._expand_conv(x)
# print("_expand_conv", x.shape)
if self.middle_dw_kernel_size:
x = self._middle_dw(x)
# print("_middle_dw", x.shape)
x = self._proj_conv(x)
# print("_proj_conv", x.shape)
return x
class MultiQueryAttentionLayerWithDownSampling(nn.Module):
def __init__(self, inp, num_heads, key_dim, value_dim, query_h_strides, query_w_strides, kv_strides, dw_kernel_size=3, dropout=0.0):
"""Multi Query Attention with spatial downsampling.
Referenced from here https://github.com/tensorflow/models/blob/master/official/vision/modeling/layers/nn_blocks.py
3 parameters are introduced for the spatial downsampling:
1. kv_strides: downsampling factor on Key and Values only.
2. query_h_strides: vertical strides on Query only.
3. query_w_strides: horizontal strides on Query only.
This is an optimized version.
1. Projections in Attention is explict written out as 1x1 Conv2D.
2. Additional reshapes are introduced to bring a up to 3x speed up.
"""
super().__init__()
self.num_heads = num_heads
self.key_dim = key_dim
self.value_dim = value_dim
self.query_h_strides = query_h_strides
self.query_w_strides = query_w_strides
self.kv_strides = kv_strides
self.dw_kernel_size = dw_kernel_size
self.dropout = dropout
self.head_dim = key_dim // num_heads
if self.query_h_strides > 1 or self.query_w_strides > 1:
self._query_downsampling_norm = nn.BatchNorm2d(inp)
self._query_proj = conv_2d(inp, num_heads*key_dim, 1, 1, norm=False, act=False)
if self.kv_strides > 1:
self._key_dw_conv = conv_2d(inp, inp, dw_kernel_size, kv_strides, groups=inp, norm=True, act=False)
self._value_dw_conv = conv_2d(inp, inp, dw_kernel_size, kv_strides, groups=inp, norm=True, act=False)
self._key_proj = conv_2d(inp, key_dim, 1, 1, norm=False, act=False)
self._value_proj = conv_2d(inp, key_dim, 1, 1, norm=False, act=False)
self._output_proj = conv_2d(num_heads*key_dim, inp, 1, 1, norm=False, act=False)
self.dropout = nn.Dropout(p=dropout)
def forward(self, x):
batch_size, seq_length, _, _ = x.size()
if self.query_h_strides > 1 or self.query_w_strides > 1:
q = F.avg_pool2d(self.query_h_stride, self.query_w_stride)
q = self._query_downsampling_norm(q)
q = self._query_proj(q)
else:
q = self._query_proj(x)
px = q.size(2)
q = q.view(batch_size, self.num_heads, -1, self.key_dim) # [batch_size, num_heads, seq_length, key_dim]
if self.kv_strides > 1:
k = self._key_dw_conv(x)
k = self._key_proj(k)
v = self._value_dw_conv(x)
v = self._value_proj(v)
else:
k = self._key_proj(x)
v = self._value_proj(x)
k = k.view(batch_size, 1, self.key_dim, -1) # [batch_size, 1, key_dim, seq_length]
v = v.view(batch_size, 1, -1, self.key_dim) # [batch_size, 1, seq_length, key_dim]
# calculate attn score
attn_score = torch.matmul(q, k) / (self.head_dim ** 0.5)
attn_score = self.dropout(attn_score)
attn_score = F.softmax(attn_score, dim=-1)
context = torch.matmul(attn_score, v)
context = context.view(batch_size, self.num_heads * self.key_dim, px, px)
output = self._output_proj(context)
return output
class MNV4LayerScale(nn.Module):
def __init__(self, inp, init_value):
"""LayerScale as introduced in CaiT: https://arxiv.org/abs/2103.17239
Referenced from here https://github.com/tensorflow/models/blob/master/official/vision/modeling/layers/nn_blocks.py
As used in MobileNetV4.
Attributes:
init_value (float): value to initialize the diagonal matrix of LayerScale.
"""
super().__init__()
self.init_value = init_value
self._gamma = nn.Parameter(self.init_value * torch.ones(inp, 1, 1))
def forward(self, x):
return x * self._gamma
class MultiHeadSelfAttentionBlock(nn.Module):
def __init__(
self,
inp,
num_heads,
key_dim,
value_dim,
query_h_strides,
query_w_strides,
kv_strides,
use_layer_scale,
use_multi_query,
use_residual = True
):
super().__init__()
self.query_h_strides = query_h_strides
self.query_w_strides = query_w_strides
self.kv_strides = kv_strides
self.use_layer_scale = use_layer_scale
self.use_multi_query = use_multi_query
self.use_residual = use_residual
self._input_norm = nn.BatchNorm2d(inp)
if self.use_multi_query:
self.multi_query_attention = MultiQueryAttentionLayerWithDownSampling(
inp, num_heads, key_dim, value_dim, query_h_strides, query_w_strides, kv_strides
)
else:
self.multi_head_attention = nn.MultiheadAttention(inp, num_heads, kdim=key_dim)
if self.use_layer_scale:
self.layer_scale_init_value = 1e-5
self.layer_scale = MNV4LayerScale(inp, self.layer_scale_init_value)
def forward(self, x):
# Not using CPE, skipped
# input norm
shortcut = x
x = self._input_norm(x)
# multi query
if self.use_multi_query:
x = self.multi_query_attention(x)
else:
x = self.multi_head_attention(x, x)
# layer scale
if self.use_layer_scale:
x = self.layer_scale(x)
# use residual
if self.use_residual:
x = x + shortcut
return x
def build_blocks(layer_spec):
if not layer_spec.get('block_name'):
return nn.Sequential()
block_names = layer_spec['block_name']
layers = nn.Sequential()
if block_names == "convbn":
schema_ = ['inp', 'oup', 'kernel_size', 'stride']
for i in range(layer_spec['num_blocks']):
args = dict(zip(schema_, layer_spec['block_specs'][i]))
layers.add_module(f"convbn_{i}", conv_2d(**args))
elif block_names == "uib":
schema_ = ['inp', 'oup', 'start_dw_kernel_size', 'middle_dw_kernel_size', 'middle_dw_downsample', 'stride', 'expand_ratio', 'mhsa']
for i in range(layer_spec['num_blocks']):
args = dict(zip(schema_, layer_spec['block_specs'][i]))
mhsa = args.pop("mhsa") if "mhsa" in args else 0
layers.add_module(f"uib_{i}", UniversalInvertedBottleneckBlock(**args))
if mhsa:
mhsa_schema_ = [
"inp", "num_heads", "key_dim", "value_dim", "query_h_strides", "query_w_strides", "kv_strides",
"use_layer_scale", "use_multi_query", "use_residual"
]
args = dict(zip(mhsa_schema_, [args['oup']] + (mhsa)))
layers.add_module(f"mhsa_{i}", MultiHeadSelfAttentionBlock(**args))
elif block_names == "fused_ib":
schema_ = ['inp', 'oup', 'stride', 'expand_ratio', 'act']
for i in range(layer_spec['num_blocks']):
args = dict(zip(schema_, layer_spec['block_specs'][i]))
layers.add_module(f"fused_ib_{i}", InvertedResidual(**args))
else:
raise NotImplementedError
return layers
class MobileNetV4(nn.Module):
def __init__(self, model):
# MobileNetV4ConvSmall MobileNetV4ConvMedium MobileNetV4ConvLarge
# MobileNetV4HybridMedium MobileNetV4HybridLarge
"""Params to initiate MobilenNetV4
Args:
model : support 5 types of models as indicated in
"https://github.com/tensorflow/models/blob/master/official/vision/modeling/backbones/mobilenet.py"
"""
super().__init__()
assert model in MODEL_SPECS.keys()
self.model = model
self.spec = MODEL_SPECS[self.model]
# conv0
self.conv0 = build_blocks(self.spec['conv0'])
# layer1
self.layer1 = build_blocks(self.spec['layer1'])
# layer2
self.layer2 = build_blocks(self.spec['layer2'])
# layer3
self.layer3 = build_blocks(self.spec['layer3'])
# layer4
self.layer4 = build_blocks(self.spec['layer4'])
# layer5
self.layer5 = build_blocks(self.spec['layer5'])
def forward(self, x):
x0 = self.conv0(x)
x1 = self.layer1(x0)
x2 = self.layer2(x1)
x3 = self.layer3(x2)
x4 = self.layer4(x3)
x5 = self.layer5(x4)
x5 = nn.functional.adaptive_avg_pool2d(x5, 1)
x5 = x5.squeeze(dim=3).squeeze(dim=2)
return x5
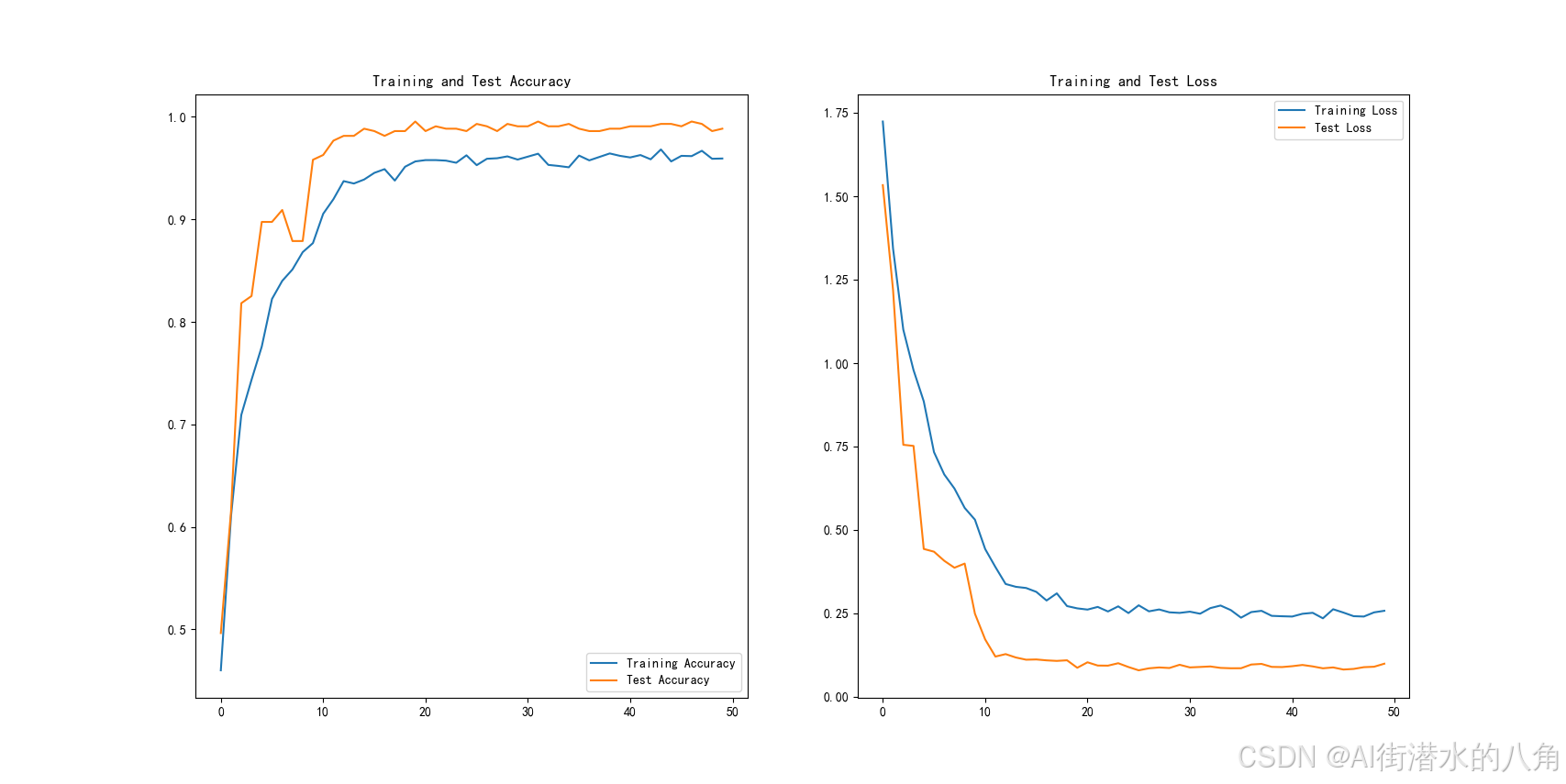
第四步:统计训练过程的loss和正确率变化
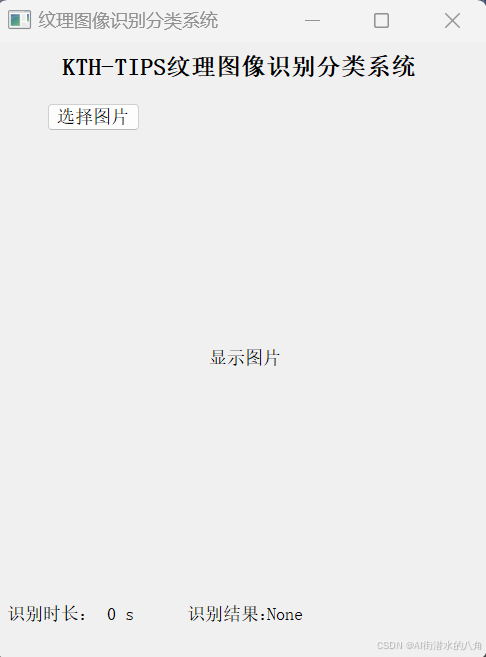
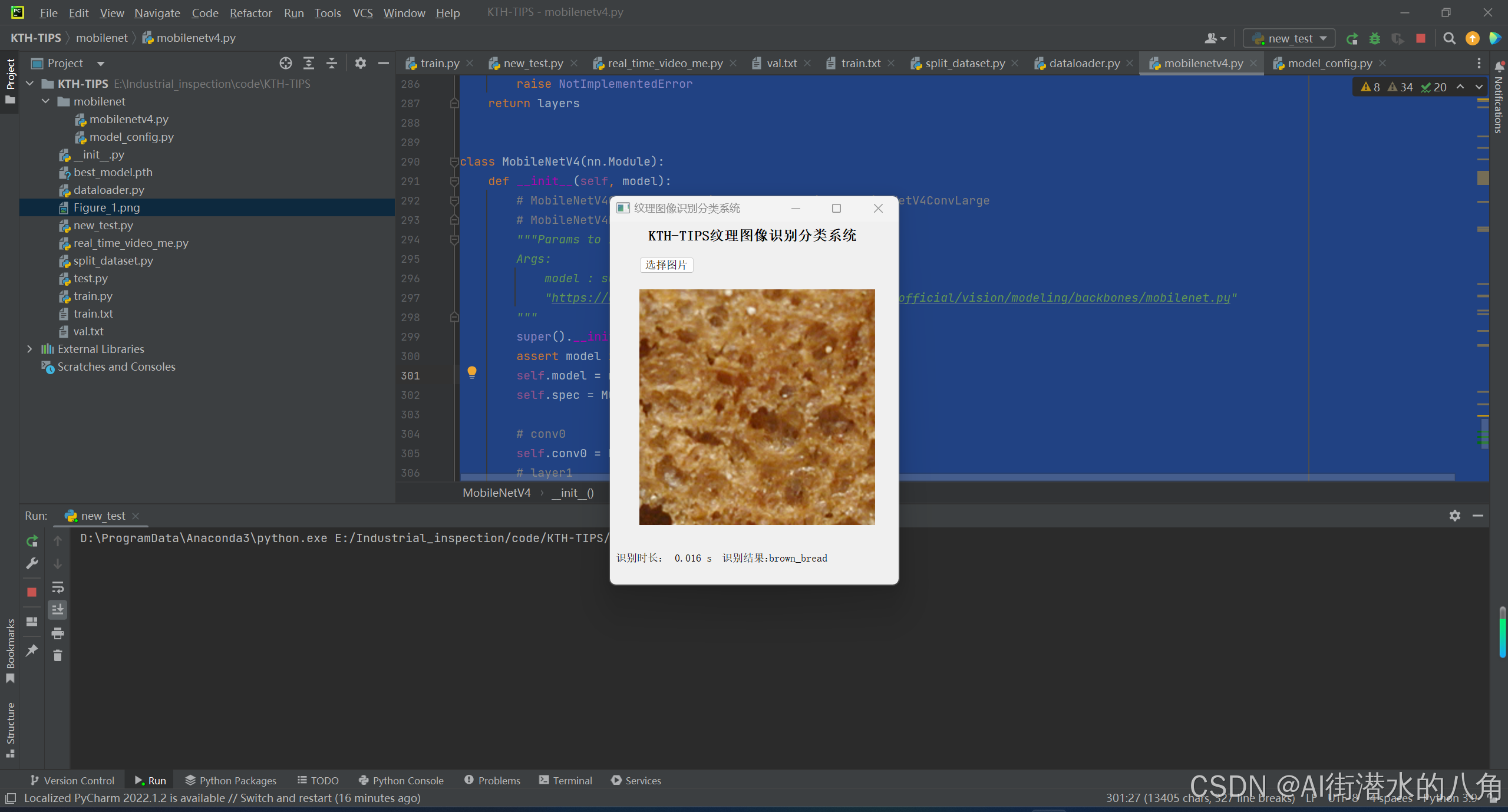
第五步:搭建GUI界面
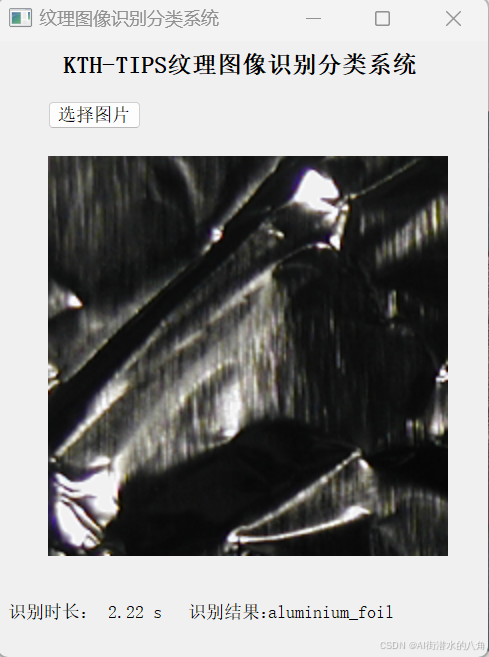
第六步:整个工程的内容
有训练代码和训练好的模型以及训练过程,提供数据,提供GUI界面代码
项目完整文件下载请见演示与介绍视频的简介处给出:➷➷➷
工业缺陷检测实战——KTH-TIPS纹理图像识别分类系统_哔哩哔哩_bilibili


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











