







 本文围绕AUTOSAR的MemIf模块展开,该模块全称Memory Abstraction Interface Module,属于ECU抽象层,可抽象ROM功能和设备。介绍了其设计原理,阐述了C语言实现,包括C文件架构、类定义、状态枚举及提供的API等,还说明了在DaVinci Configurator中的配置方法。
本文围绕AUTOSAR的MemIf模块展开,该模块全称Memory Abstraction Interface Module,属于ECU抽象层,可抽象ROM功能和设备。介绍了其设计原理,阐述了C语言实现,包括C文件架构、类定义、状态枚举及提供的API等,还说明了在DaVinci Configurator中的配置方法。
AUTOSAR-MemIf模块
0 前言
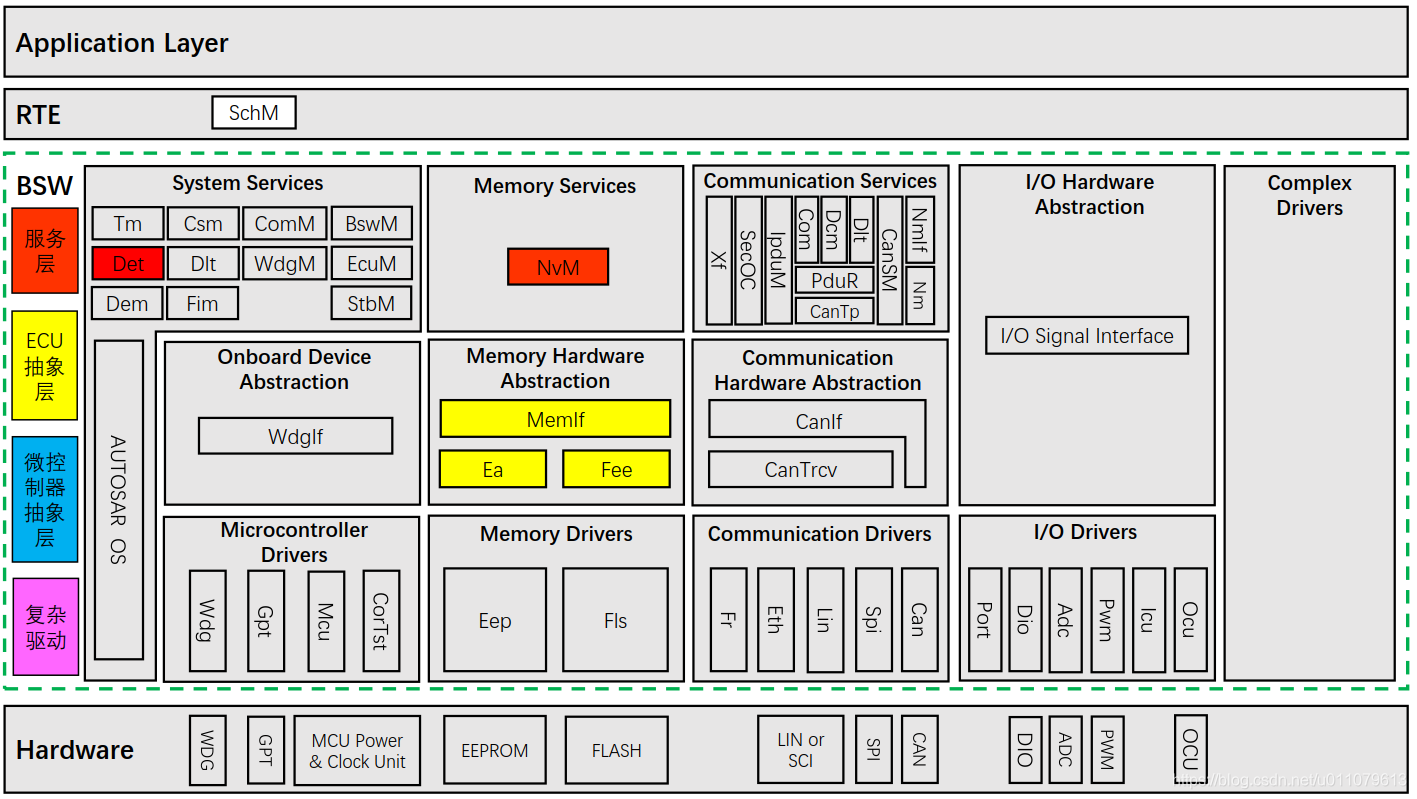
MemIf模块全称Memory Abstraction Interface Module,属于ECU抽象层
MemIf模块有两个意义:
- 抽象ROM的功能,无论使用Flash还是EEPROM,从MemIf模块开始指令没有任何区别,代码通用,彻底脱离硬件
- 抽象ROM的设备,MemIf模块眼中,ECU只有3种区别:只使用Flash,只使用EEPROM,两者同时使用
MemIf模块最精简任务包括:
- 给Flash或者EEPROM或者同时给两者一个Device Index,根据Device Index将NvM模块的指令转发给对应的Fee模块或者Ea模块
- MemIf模块模块没有初始化,没有配置指针,没有状态指针
1 MemIf模块的设计原理
MemIf模块没有MemIf_Init和MemIf_MainFunction
MemIf模块所有API都是同步指令
2 MemIf模块的C语言实现
2.1 C文件架构
| 静态文件 | 描述 |
|---|---|
| MemIf.h | 包含API所需的状态枚举常量、类定义 |
| MemIf.c | API代码 |
| MemIf_Types.h | EMEIF_开头的枚举常量 |
| 动态文件 | 描述 |
|---|---|
| StartApplication_MemIf_ecuc.arxml | Configurator生成的本地配置文件 |
| MemIf_Bswmd.arxml | |
| MemIf_Cfg.h | 包含项目所需的常量宏定义、开关宏定义 |
| MemIf_Cfg.c | 包含使用到的Device API列表 |
2.2 使用到的类定义和状态枚举
| MemIf定义的类 | 描述 | 定义来源 |
|---|---|---|
| MemIf_StatusType | 描述Fls模块的Module Status: 1. MEMIF_UNINIT模块未初始化 2. MEMIF_IDLE没有需要处理的job 3. MEMIF_BUSY模块正在处理job,不接受新job | MemIf_Types.h |
| MemIf_JobResultType | 描述Fls模块的Job Result 1. MEMIF_JOB_OKjob处理成功 2. MEMIF_JOB_FAILEDjob处理以error结束 3. MEMIF_JOB_PENDINGjob正在处理 4. MEMIF_JOB_CANCELLEDjob已经取消 | MemIf_Types.h |
| MemIf_ModeType | 描述Fls模块的Processing Mode: 1. MEMIF_MODE_SLOWSlow模式 2. MEMIF_MODE_FASTFast模式 | MemIf_Types.h |
| Std定义的类 | 描述 | 定义来源 |
|---|---|---|
| Std_ReturnType | 描述Job Request结果 1. E_OK对同步指令,表示指令执行成功 对异步指令,表示指令被队列接受 2. E_NOT_OK对同步指令,表示指令执行失败 对异步指令,表示指令被队列拒绝 | Std_Type.h |
2.3 MemIf模块提供的API
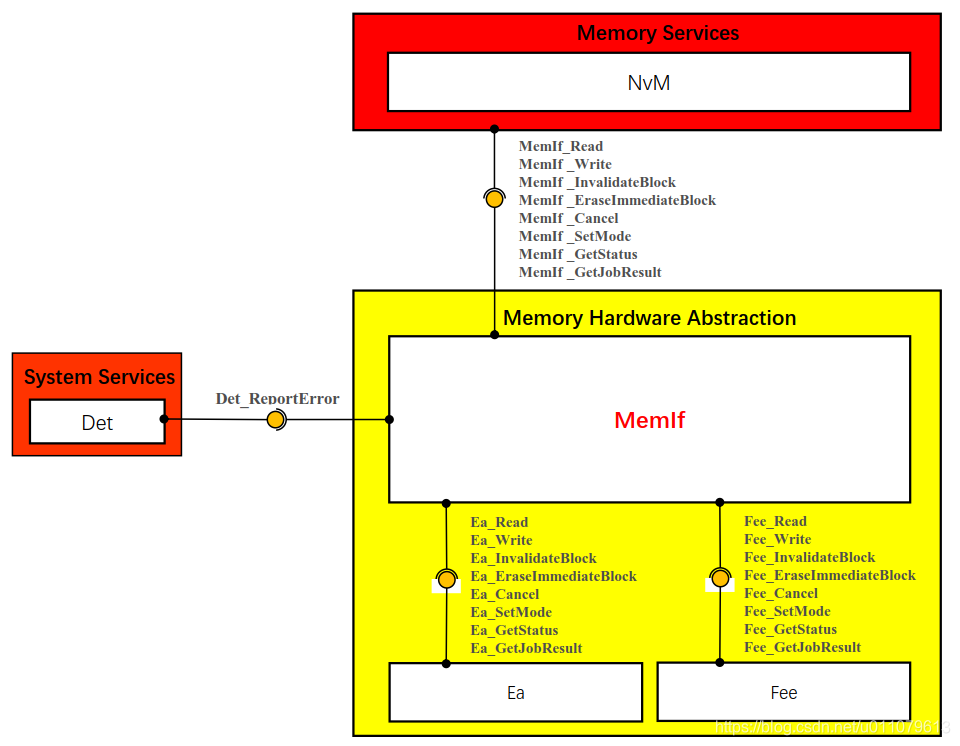
MemIf_Read
Std_ReturnType MemIf_Read( uint16 DeviceIndex,uint16 BlockNumber,uint16 BlockOffset,uint8* DataBufferPtr,uint16 Length) |
|---|
- 根据
DeviceIndex的不同,MemIf_Read将调用Fee_Read或者Ea_Read MemIf_Read是同步指令,Fee_Read或者Ea_Read是异步指令,注意区分
MemIf_Write
Std_ReturnType MemIf_Write( uint16 DeviceIndex,uint16 BlockNumber,uint8* DataBufferPtr) |
|---|
- 根据
DeviceIndex的不同,MemIf_Write将调用Fee_Write或者Ea_Write MemIf_Write是同步指令,Fee_Write或者Ea_Write是异步指令,注意区分
MemIf_InvalidateBlock
Std_ReturnType MemIf_InvalidateBlock( uint16 DeviceIndex,uint16 BlockNumber) |
|---|
- 根据
DeviceIndex的不同,MemIf_InvalidateBlock将调用Fee_InvalidateBlock或者Ea_InvalidateBlock MemIf_InvalidateBlock是同步指令,Fee_InvalidateBlock、Ea_InvalidateBlock都是异步指令,注意区分
MemIf_EraseImmediateBlock
Std_ReturnType MemIf_EraseImmediateBlock( uint16 DeviceIndex,uint16 BlockNumber) |
|---|
- 根据
DeviceIndex的不同,MemIf_EraseImmediateBlock将调用Fee_EraseImmediateBlock或者Ea_EraseImmediateBlock MemIf_EraseImmediateBlock是同步指令,Fee_EraseImmediateBlock、Ea_EraseImmediateBlock都是异步指令,注意区分
MemIf_Cancel
Std_ReturnType MemIf_Cancel(uint16 DeviceIndex) |
|---|
- 根据
DeviceIndex的不同,MemIf_Cancel将调用Fee_Cancel或者Ea_Cancel MemIf_Write、Fee_Write、Ea_Write都是同步指令
MemIf_SetMode
void MemIf_SetMode(MemIf_ModeType Mode) |
|---|
MemIf_SetMode同时调用Fee_SetMode或者Ea_SetModeMemIf_SetMode、Fee_SetMode、Ea_SetMode都是同步指令
MemIf_GetStatus
Std_ReturnType MemIf_GetStatus(uint16 DeviceIndex) |
|---|
- 根据
DeviceIndex的不同,MemIf_GetStatus将调用Fee_GetStatus或者Ea_GetStatus MemIf_GetStatus、Fee_GetStatus、Ea_GetStatus都是同步指令
MemIf_GetJobResult
Std_ReturnType MemIf_GetJobResult(uint16 DeviceIndex) |
|---|
- 根据
DeviceIndex的不同,MemIf_GetJobResult将调用Fee_GetJobResult或者Ea_GetJobResult MemIf_GetJobResult、Fee_GetJobResult、Ea_GetJobResult都是同步指令
2.4 MemIf模块使用的外部API
Det_ReportError
Std_ReturnType Det_ReportError( uint16 ModuleId,uint8 InstanceId,uint8 ApiId,uint8 ErrorId) |
|---|
- 来自Det模块的API,检测并报告开发错误,由Dev Error Detect启用
ModuleId==MEMIF_MODULE_ID或22InstanceId=0ErrorId有2个,如下
MEMIF_E_PARAM_DEVICE
MEMIF_E_PARAM_POINTER
3 MemIf模块的DaVinci Configurator配制
3.1 MemIf\MemIfMemHwAs
每个Fee模块或者Ea模块都有一个MemIfMemHwA页面,提供设备的Device Index
Reference to Fee/Ea
| 配制 | Configurator选项 | Reference to Fee/Ea -> reference |
|---|---|---|
| 影响 | MemIf_Cfg.h | #define MEMIF_Fee#define MEMIF_Ea |
- 关联一个Fee/FeeGeneral或者Ea/EaGeneral
Memory Hardware Abstraction Id
| 配制 | Configurator选项 | Memory Hardware Abstraction Id -> [0, 1] |
|---|---|---|
| 影响 | MemIf_Cfg.h | #define MEMIF_Fee#define MEMIF_Ea |
- 给关联的Fee/FeeGeneral或者Ea/EaGeneral提供一个Device Index
3.2 MemIf\MemIfGeneral
MemIfGeneral部分主要对应MemIf_Cfg.h文件中的常量宏定义和开关宏定义
Development Error Detection
| 配制 | Configurator选项 | Development Error Detection -> True/False |
|---|---|---|
| 影响 | MemIf_Cfg.h | #define MEMIF_DEV_ERROR_DETECT |
- 宏定义开关,是否启用Det模块检测开发错误
- 如果启用Development Error Detection,则添加
#include Det.h并启用APIDet_ReportError - 选择
False
Number of devices
| 配制 | Configurator选项 | Number of devices -> [0, 1] |
|---|
- 功能没做好,不用填
Safe Bsw Checks
| 配制 | Configurator选项 | Safe Bsw Checks -> True/False |
|---|
- 带有功能安全要求的项目需要开启,非AUTOSAR标准内容
- 选择
False
Version Info Api
| 配制 | Configurator选项 | Version Info Api -> True/False |
|---|---|---|
| 影响 | MemIf_Cfg.h | #define MEMIF_DEV_ERROR_DETECT |
- 宏定义开关,是否启用API
MemIf_GetVersionInfo - 选择
False

















 452
452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









