




 本文介绍了SVO(semi-dense visual odometry)中的深度滤波器原理,包括三角化估计深度、普通帧更新种子点概率分布以及高斯-均匀混合分布的逆深度描述。通过极线搜索在不同帧中匹配特征点,利用贝叶斯估计融合多个深度测量值,从而减小不确定性。在种子点的概率分布收敛后,将其插入地图中供追踪使用。
本文介绍了SVO(semi-dense visual odometry)中的深度滤波器原理,包括三角化估计深度、普通帧更新种子点概率分布以及高斯-均匀混合分布的逆深度描述。通过极线搜索在不同帧中匹配特征点,利用贝叶斯估计融合多个深度测量值,从而减小不确定性。在种子点的概率分布收敛后,将其插入地图中供追踪使用。
基础:三角化估计深度
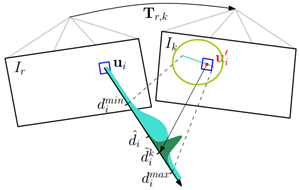
在不同的位置观测同一个三维点P(x, y, z),已知在不同位置处观察到的三维点的二维投影点p1(x1, y1), p2(x2, y2),利用三角关系,恢复出三维点的深度信息z。

由于两条直线无法相交,通过最小二乘法求解。
按照对极几何中的定义,设x1, x2为两个特征点的归一化坐标,则它们满足:
s1x1 = s2Rx2 + t 公式(1)
左右两侧分别乘以x1^,得:
s1x1^x1 = 0 = s2x1^R x2 +x1^ t
可以先求出s2,再求s1.最后得到特征点的空间位置。
Mapping部分主要是计算特征点的深度。单目VO中,刚刚从图像中提取的热乎的关键点是没有深度的,需要等相机位移之后再通过三角化估计深度。我们知道通过两帧图像的匹配点就可以计算出这一点的深度值,如果有多幅图像,那就能计算出这一点的多个深度值。这就像对同一个状态变量我们进行了多次
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 858
858

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









