clear all;
clc;
%获取文件名、路径
[Filename,Pathname,FilterIndex]=uigetfile({'test1.png','D:\新建文件夹\遥感\数字摄影测量\Forstner算子'},'Select the input image');
if FilterIndex
pic_orig=imread([Pathname,Filename]);%读取原始标准影像
else
return
end
figure(1);
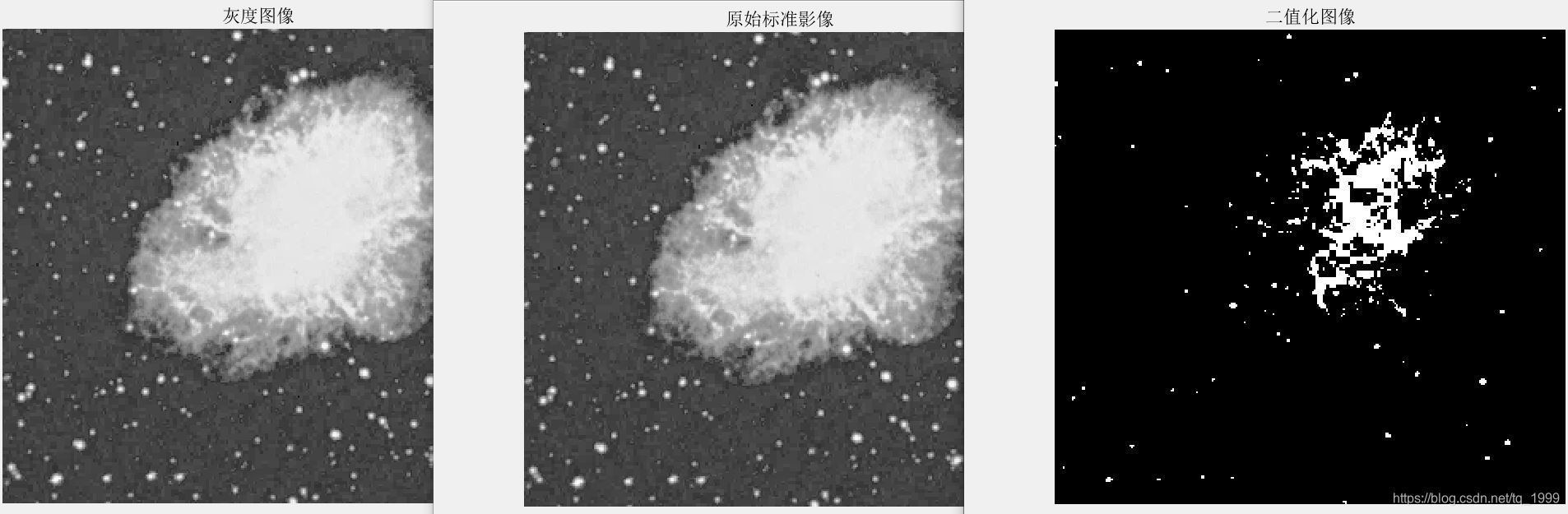
imshow(pic_orig);%显示原始标准影像
title('原始标准影像');
%判断是否为彩色图像,是彩色则转换为灰度图像
[x,y,z]=size(pic_orig);
if(z~=1)
pic_gray = rgb2gray(pic_orig);
end
figure(2);
imshow(pic_gray);%显示灰度图像
title('灰度图像');
%lever=graythresh(pic_gray);%二值图像的阈值
pic_bw=im2bw(pic_gray,0.9);%把灰度图像转换成二值图像,阈值可调
figure(3);
imshow(pic_bw);
title('二值化图像');
%第一步:先用4个方向的差分算子提取初选点
result=zeros(x,y);%特征提取结果
for i=2:x-1
for j=2:y-1
dg1=abs(pic_bw(i,j)-pic_bw(i+1,j));
dg2=abs(pic_bw(i,j)-pic_bw(i,j+1));
dg3=abs(pic_bw(i,j)-pic_bw(i-1,j));
dg4=abs(pic_bw(i,j)-pic_bw(i,j-1));
dg=[dg1,dg2,dg3,dg4];
temp=sort(dg);%对四个差分算子进行升序排列
if temp(3)==1%有任意两个大于阈值,则该像素有可能是一特征点
result(i,j)=255;%是初选点
else
result(i,j)=0;%不是初选点
end
end
end
figure(4);
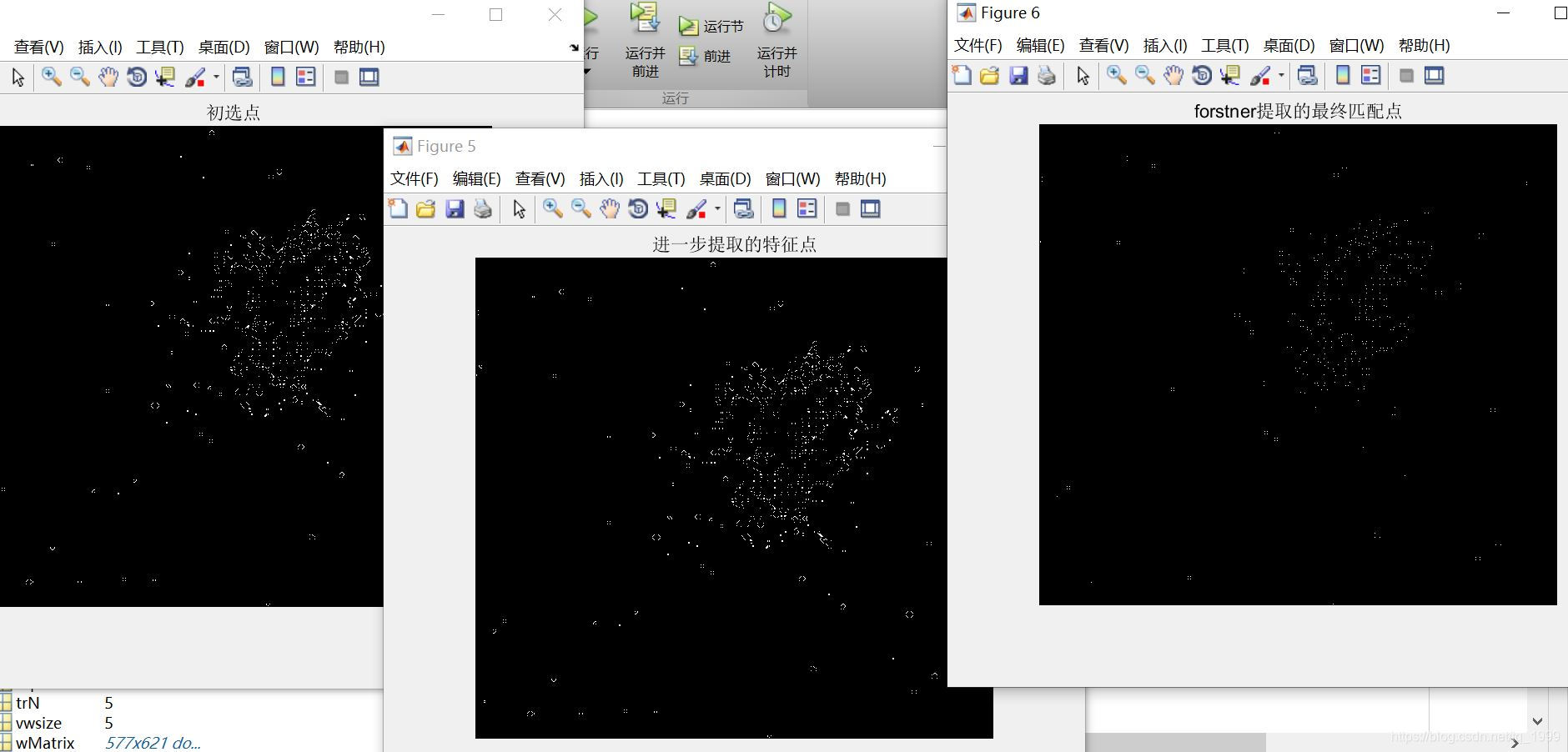
imshow(result);
title('初选点');
%第二步:在以初选点为中心的3*3窗口中计算协方差矩阵与圆度
wMatrix=zeros(x,y);%权重矩阵
Tq=0.8;%阈值,可设置
for i=2:x-1
for j=2:y-1
if result(i,j)==255%如果是初选点
gu2=0.0;
gv2=0.0;
guv=0.0;
for ii=i-1:i
for jj=j-1:j
gu2=gu2+(pic_bw(ii+1,jj+1)-pic_bw(ii,jj))^2;
gv2=gv2+(pic_bw(ii,jj+1)-pic_bw(ii+1,jj))^2;
guv=guv+(pic_bw(ii+1,jj+1)-pic_bw(ii,jj))*(pic_bw(ii,jj+1)-pic_bw(ii+1,jj));
end
end
DetN=gu2*gv2-guv^2;
trN=gu2+gv2;
q=4*DetN/(trN*trN);
%第三步:设点该阈值Tq,若满足则计算权值
if q>Tq
wMatrix(i,j)=DetN/trN;
else
result(i,j)=0;
end
end
end
end
figure(5);
imshow(result);
title('进一步提取的特征点');
%第四步:以权值为基础,在一定窗口内抑制非最大候选点,取出局部极大值点
vwsize=5;%选择5*5的窗口
wradius=floor(vwsize/2);
for i=wradius+1:x-wradius
for j=wradius+1:y-wradius
if result(i,j)==255
tempiv= wMatrix(i-wradius:i+wradius,j-wradius:j+wradius);
tempsort=sort(tempiv(:),'descend');
if wMatrix(i,j)==tempsort(1)&&wMatrix(i,j)~=tempsort(2)
;
else
result(i,j)=0;
end
end
end
end
figure(6);
imshow(result);
title('forstner提取的最终匹配点');



























 2119
2119

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









