



在日益复杂的IT环境中,开发团队往往需要维护多套系统的账号密码,这不仅增加了管理成本,也带来了潜在的安全风险。为了彻底解决这一问题,GitPuk现已支持与Soular进行深度集成。
1、soular安装
1.1 安装
以centos操作系统为例
- 下载
centos安装包下载地址:点击下载soular,点击centos下载,下载完成后得到tiklab-soular-1.1.5.rpm的文件
wget -O tiklab-soular-1.1.5.rpm https://install.tiklab.net/app/install/soular/V1.1.5/tiklab-soular-1.1.5.rpm
- 安装
上传到服务器上,在文件同级目录执行命令安装。
sudo rpm -ivh tiklab-soular-1.1.5.rpm
- 启动
系统默认安装路径为/opt目录,进入/opt/tiklab-soular/bin目录下,执行./soular start即可启动成功。
./soular start
使用 http://ip:9100 进行访问。初始用户名密码admin\123456登录,首次登录根据需要修改管理员密码。成功登录后展示soular首页。

2、GitPuk安装与配置
2.1 安装
以centos操作系统为例
- 下载
centos安装包下载地址:点击下载GitPuk,点击centos下载,下载完成后得到tiklab-gitpuk-1.2.0.rpm的文件
wget -O tiklab-gitpuk-1.2.0.rpm https://install.tiklab.net/app/install/gitpuk/V1.2.0/tiklab-gitpuk-1.2.0.rpm
- 安装
上传到服务器上,在文件同级目录执行命令安装。
rpm -ivh tiklab-gitpuk-1.2.0.rpm
- 启动
系统默认安装路径为/opt目录,进入/opt/tiklab-gitpuk/bin目录下,执行./gitpuk start即可启动成功。
./gitpuk start
使用 http://ip:9800 进行访问。初始用户名密码admin\123456登录,首次登录根据需要修改管理员密码。成功登录后展示gitpuk首页。
2.2 配置
属性说明:
配置统一登录,需要修改application.yaml。配置文件yaml文件各个系统的默认位置:
| 系统 | 默认位置 |
| Windows | 默认在安装目录 --> conf目录下application.yaml文件 |
| Mac | 默认在app下的Contents --> conf 目录下application.yaml文件 |
| Linux | 默认在/opt/tiklab-arbess/conf 目录下application.yaml文件 |
| Docker | 默认在镜像文件内/usr/local/tiklab-arbess/conf 目录下application.yaml文件 |
以CentOS为例,找到配置文件application.yaml,编辑配置文件,找到auth项目。

属性说明:
| 字段 | 说明 |
| auth.type | 是否为统一登录,local:本地模式 soular:统一模式 |
| auth.soular.address | Soular的应用地址。 |
| auth.expire | 登录过期时间,设置的时间段呢不需要重新登录。 |
将auth.type值调整为soular,auth.soular.address调整为文章第一段启动的链接(即soular的启动地址)。

配置完成后,需要重启gitpuk系统重启完成之后,进入登录页使用soular用户登录。进入gitpuk系统设置后打开用户,点击用户信息都会跳转到soular进行维护。

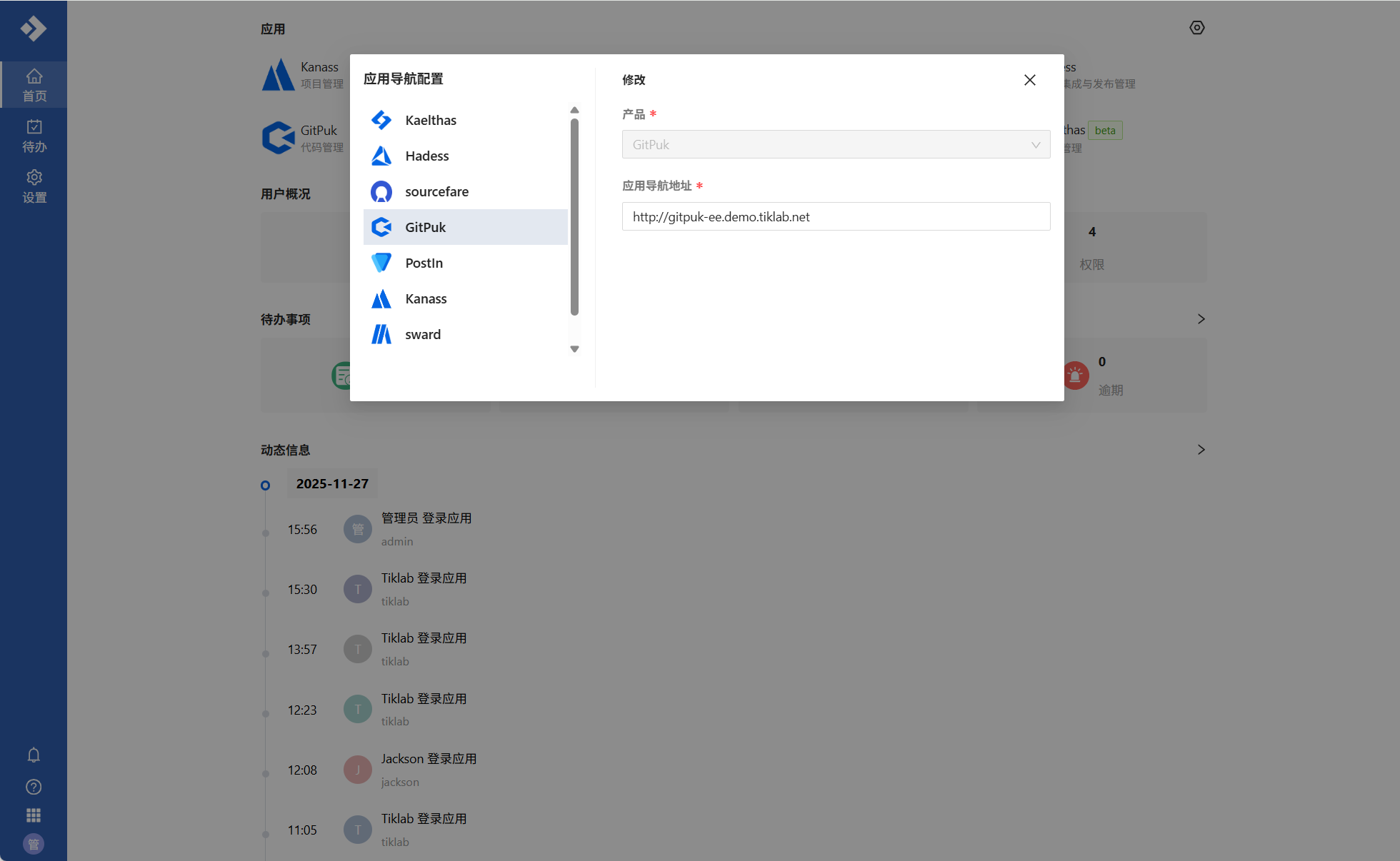
3、添加GitPuk地址
GitPuk统一登录配置完成后,可以在soular配置GitPuk地址。进入soular后点击右上角设置按钮配置上GitPuk即可

















 568
568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









