



GitPuk社区版支持钉钉集成,实现与企业统一认证登入体系的无缝衔接。本文将详解如何配置,让团队成员一键登录,畅通无阻。
1、GitPuk安装与配置
1.1 安装
本文以CentOS操作系统为例。
- 下载
CentOS安装包下载地址:点击下载gitpuk,点击CentOS下载,下载完成后得到类似tiklab-gitpuk-1.2.0.rpm的文件。
wget -O tiklab-gitpuk-1.2.0.rpm https://install.tiklab.net/app/install/gitpuk/V1.2.0/tiklab-gitpuk-1.2.0.rpm
- 安装
上传到服务器上,在文件同级目录执行命令安装
rpm -ivh tiklab-gitpuk-1.2.0.rpm
- 启动
系统默认安装路径为/opt目录,进入/opt/tiklab-gitpuk/bin目录下,执行./gitpuk start即可启动成功。
./gitpuk start
使用 http://ip:9800 进行访问。使用初始用户名密码admin\123456登录。成功登录后显示gitpuk首页。
1.2 配置钉钉信息
配置钉钉登录,首先需要填写钉钉的信息,开启钉钉配置后即可同步用户信息及登录。
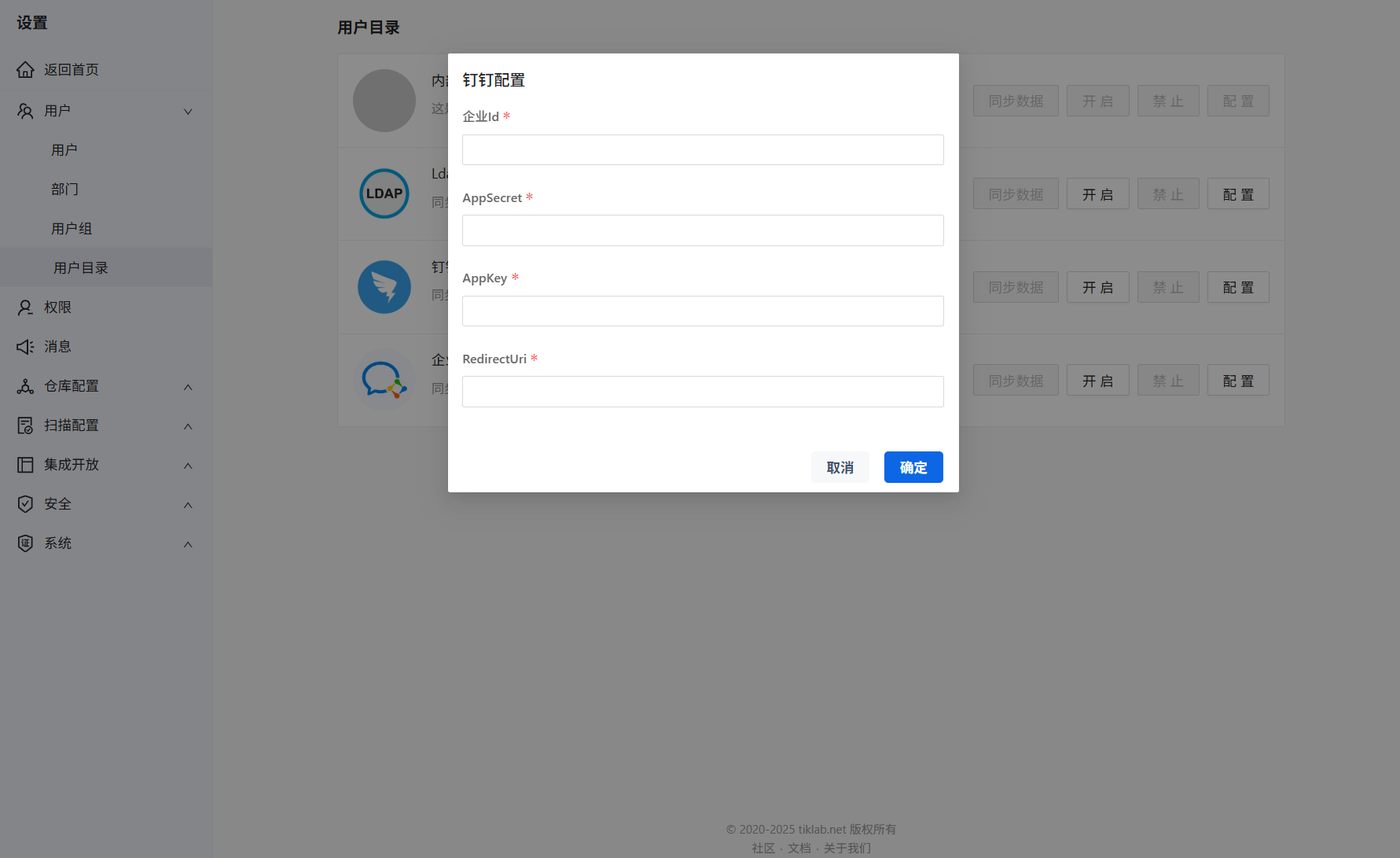
需要填写钉钉应用凭证,用于验证调用方身份并授权操作权限的密钥,主要包括以下类型
属性说明:
| 参数 | 说明 |
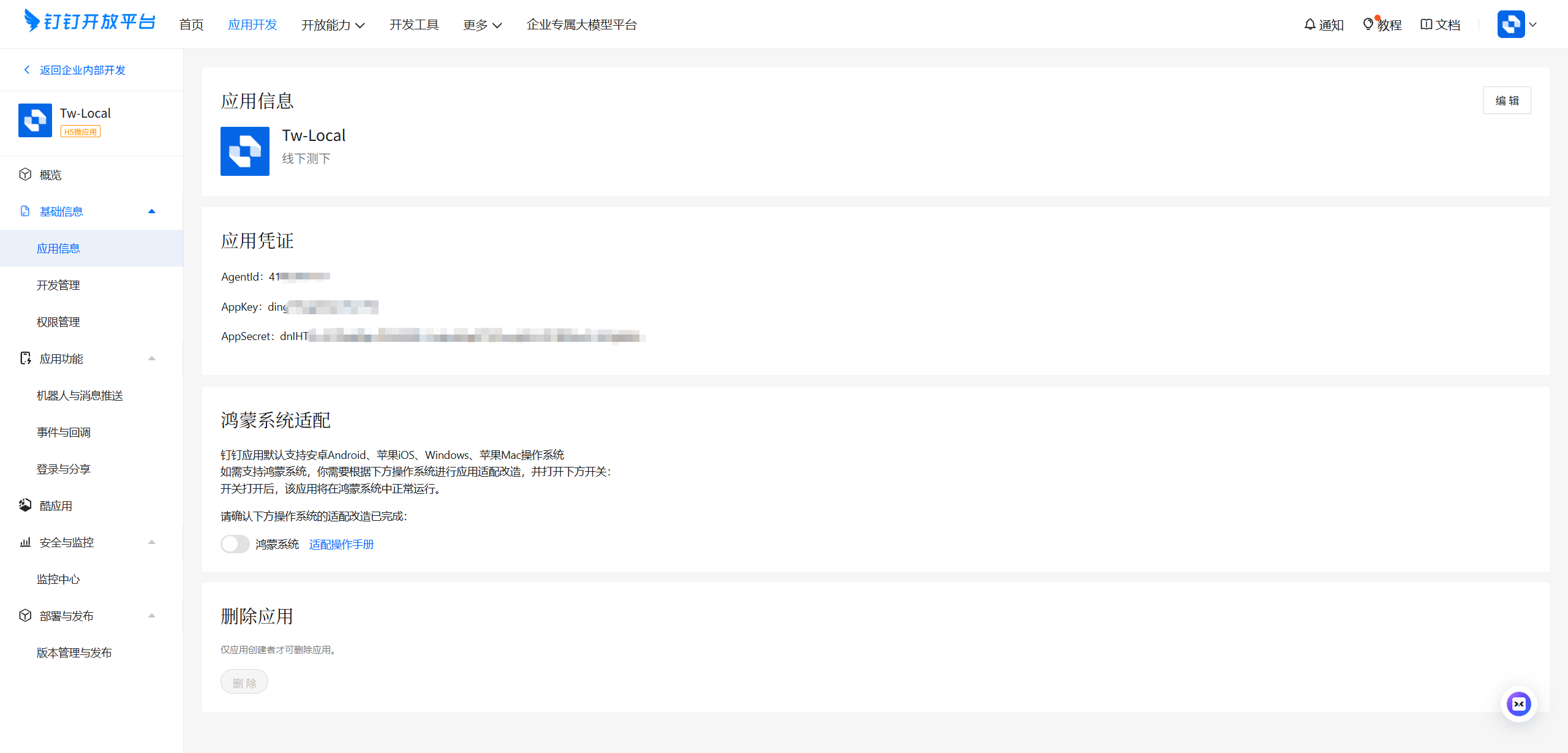
| 企业ID | 钉钉的企业ID,在钉钉开放平台显示为AgentId。 |
| AppKey | 企业内部应用的唯一标识与密钥,用于调用API。 |
| AppSecret | 企业内部应用的唯一标识与密钥,用于调用API。 |
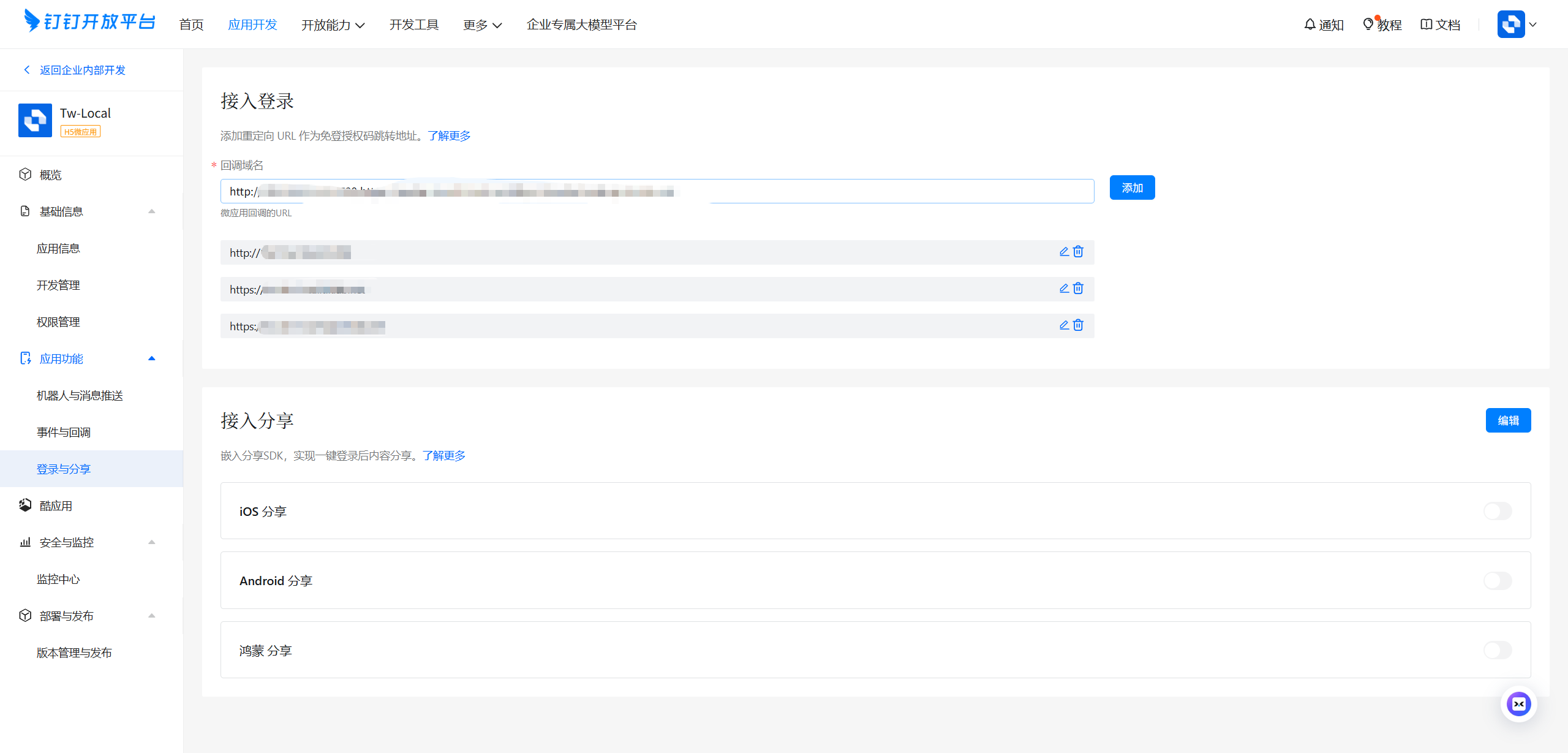
| RedirectUri | 微应用回调的URL。 |
钉钉应用凭证在钉钉开放平台中获取。
RedirectUri为钉钉开放平台微应用回调的URL,需要在应用功能→登录与分享添加方可。
2、钉钉登录
2.1 同步账号
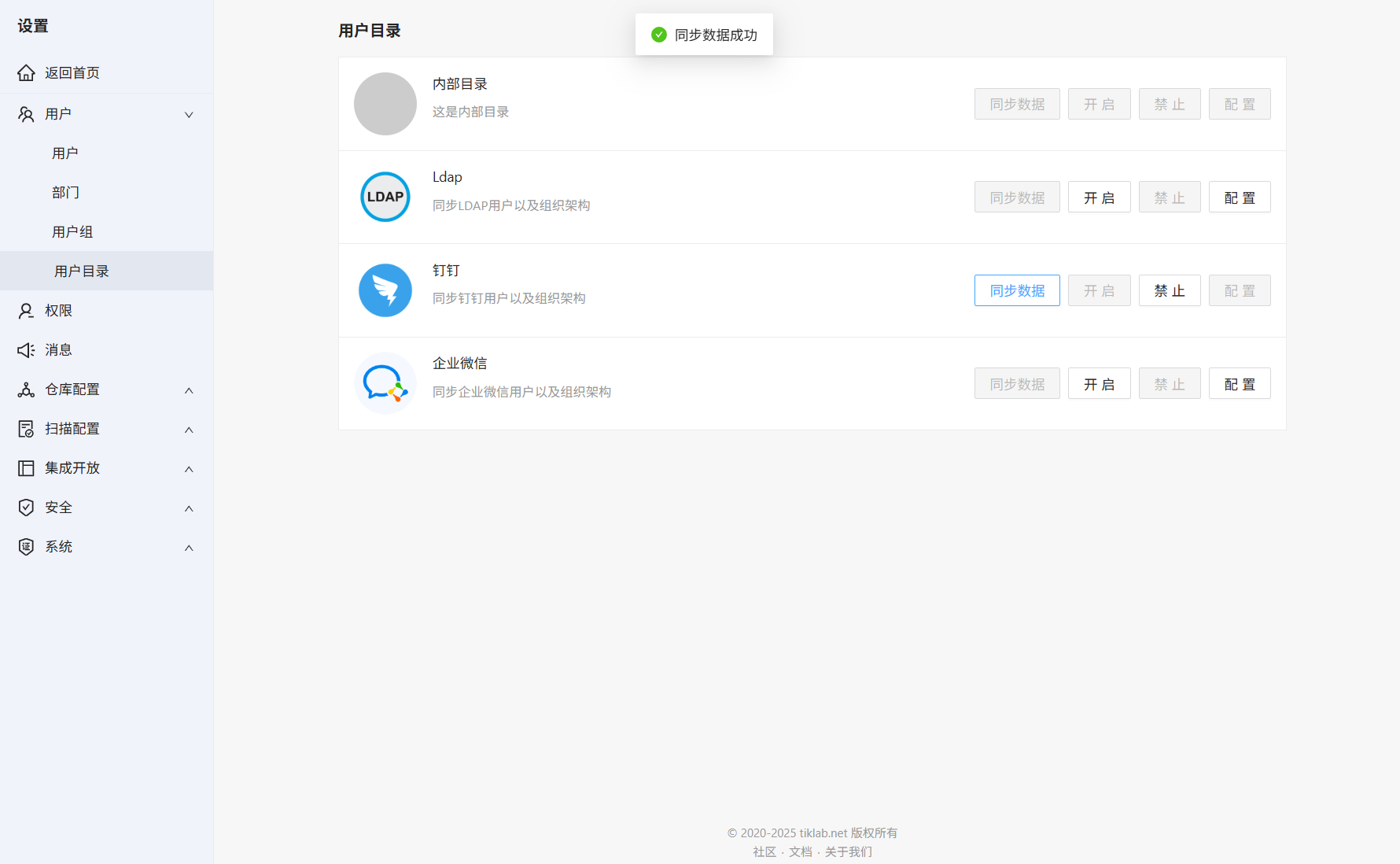
配置成功后点击开启,此时同步数据的按钮会亮起,点击同步数据,就会把钉钉下的用户信息同步到gitpuk。
若配置信息填写错误导致同步数据失败,点击禁止,配置按钮会再次亮起,可以修改配置信息。
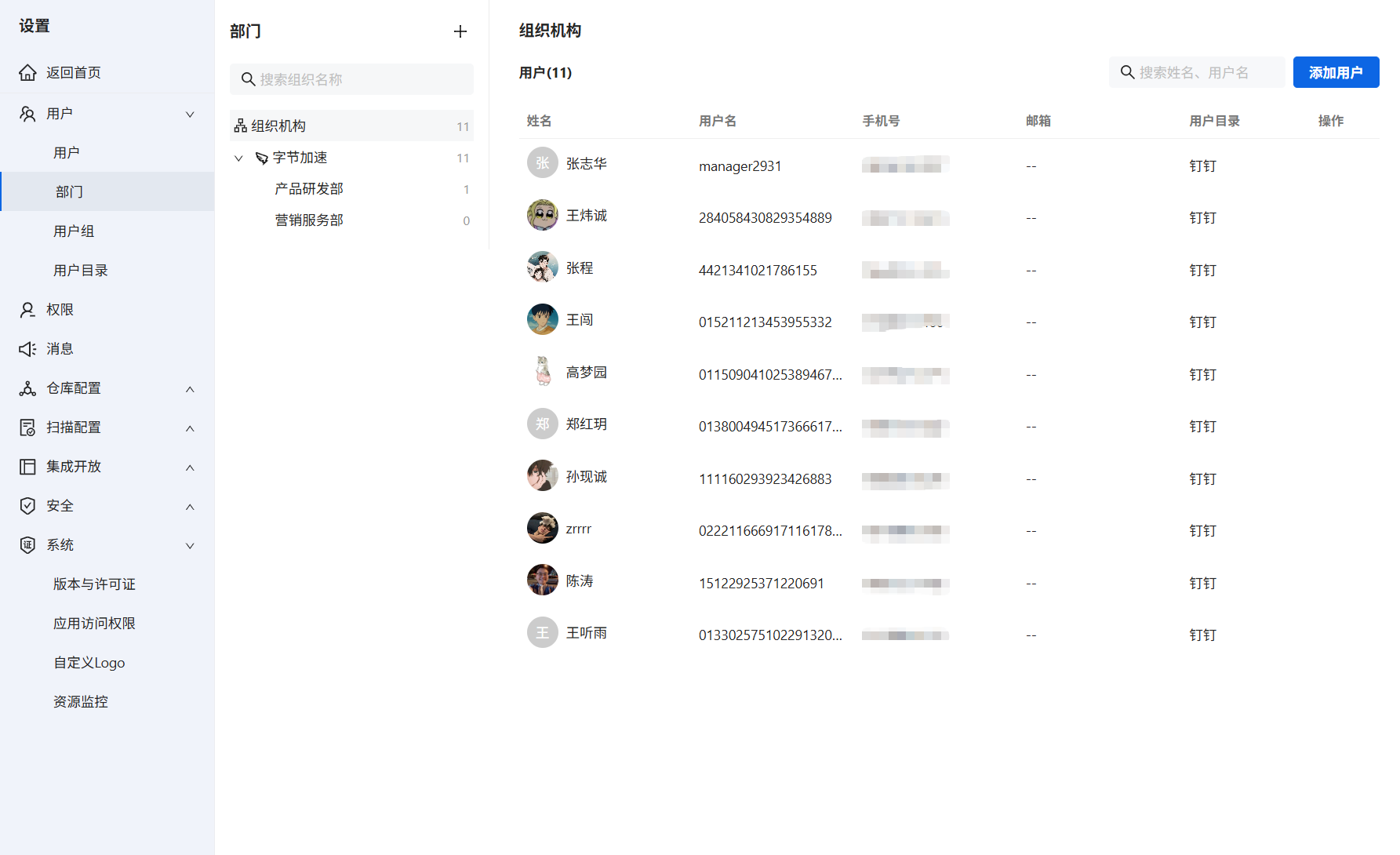
2.2 查询钉钉同步用户
1.同步完成后可以点击部门,进行查看同步的部门与用户
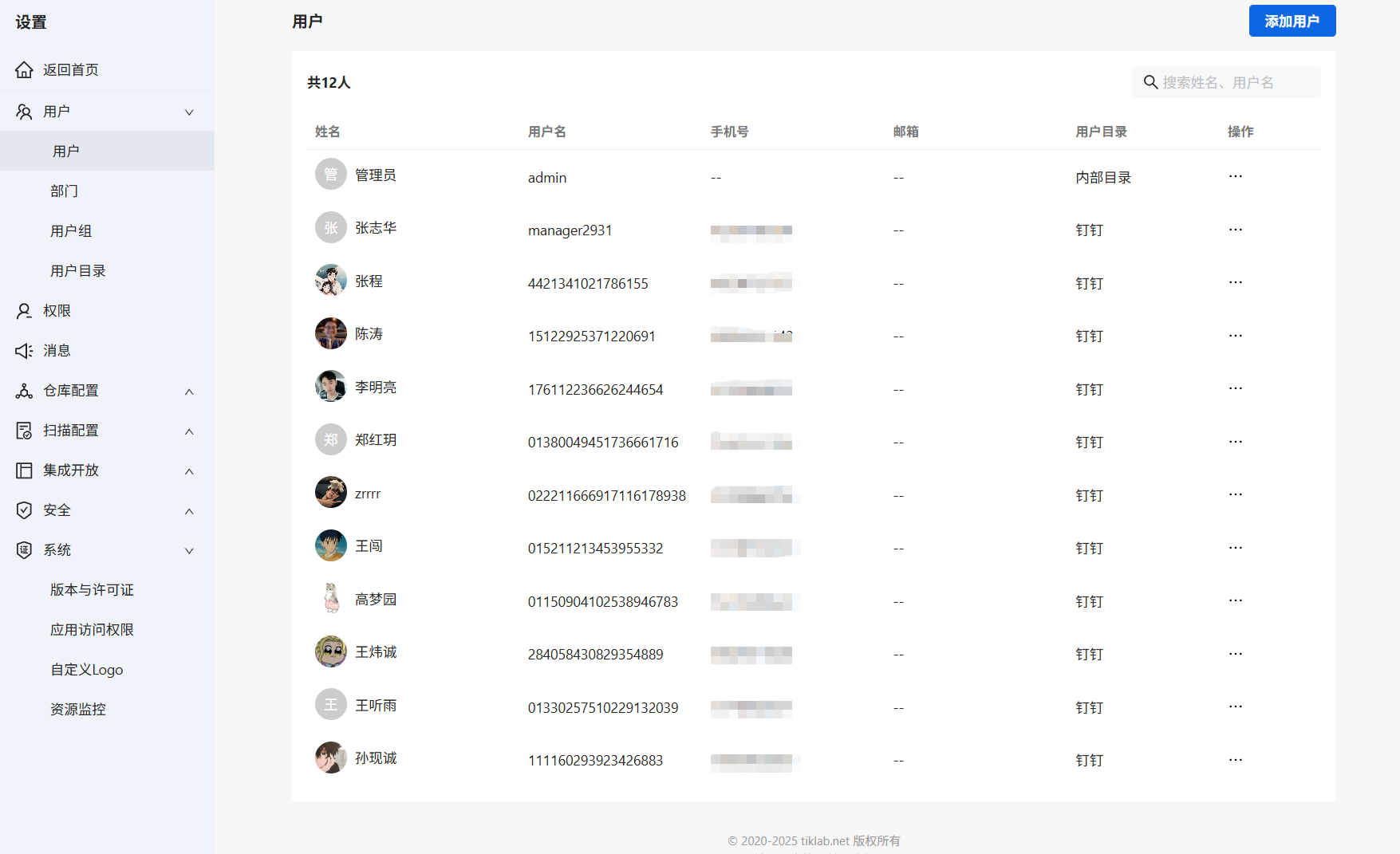
2.也可以点击用户进行查看同步完成后钉钉用户,同步过来的人用户目录会显示钉钉
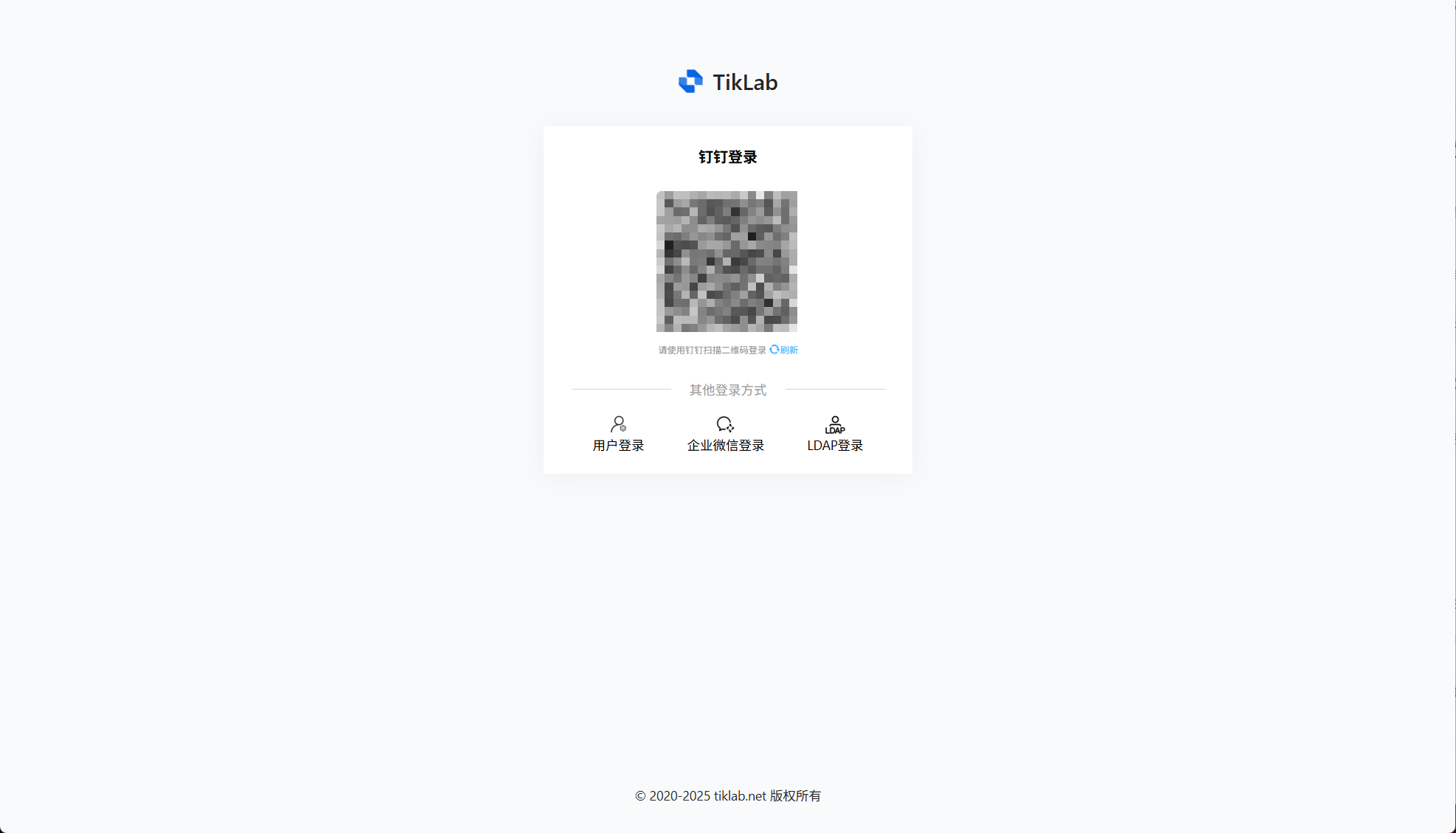
2.3 钉钉用户登入系统
在登入系统时,可以点击下方的钉钉登入方式进行登入

















 467
467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









