







主流机器人厂商

主要参数
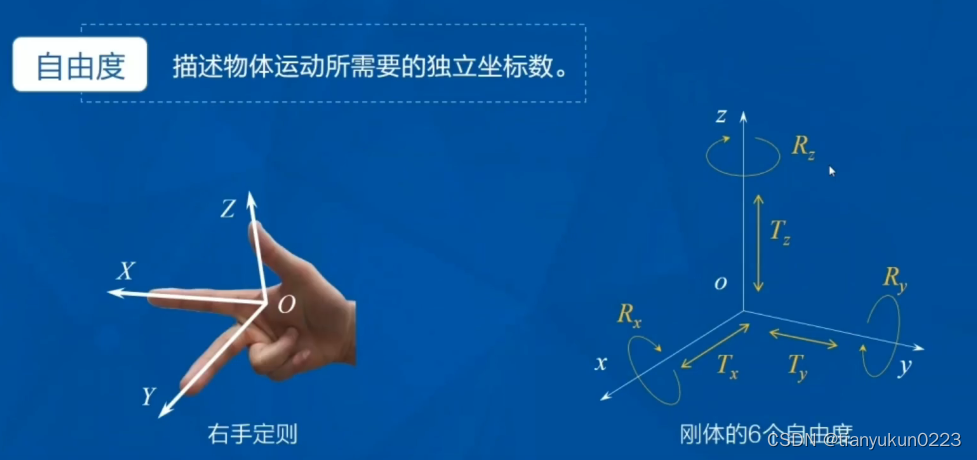
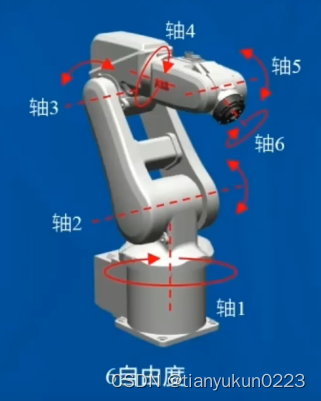
自由度
额定负载
额定负载 也称有效负载 是指正常作业条件下,工业机器人在规定性能范围内,手腕末端所能承受的最大载荷

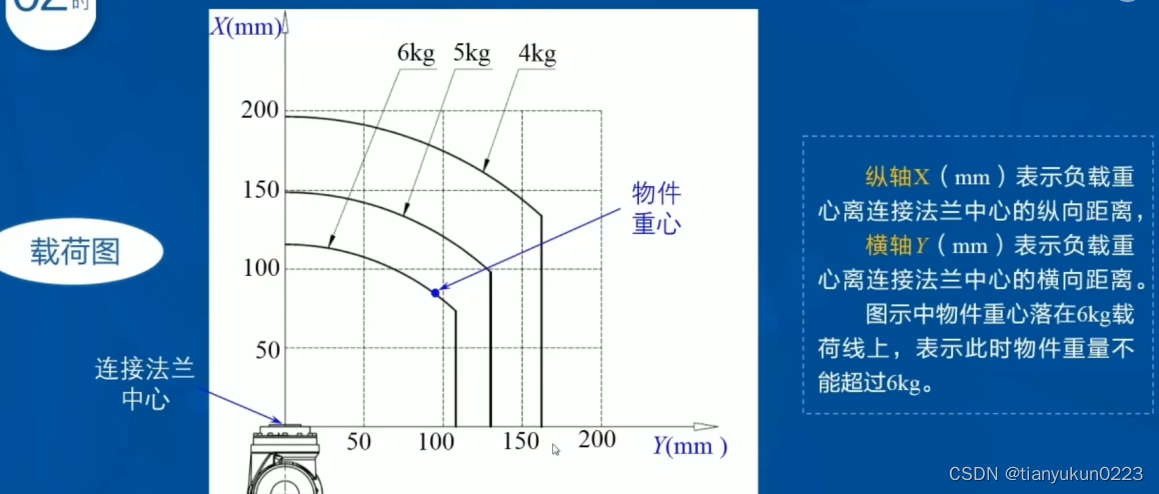
工作空间
工作空间又称工作范围 工作过程,是指工业机器人在作业时 手腕参考中心(即手腕旋转中心 ,P点)所能到达的空间区域,不包括手部本身所能达到的区域
精度
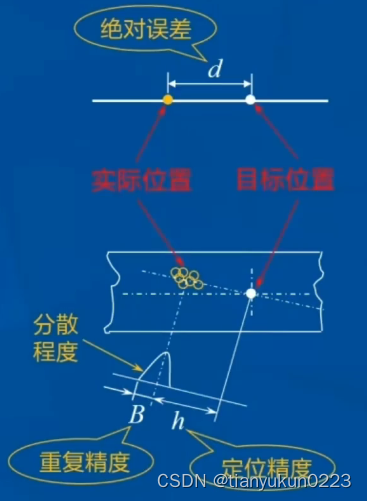
定位精度 又称绝对精度 是指机器人末端执行器实际到达位置与目标位置之间的差距
重复定位精度 指在相同的运动位置命令下,机器人重复定位其末端执行器与同一目标位置的能力,以实际位置值的分散程度来表示
驱动系统
工业机器人的驱动系统,按动力源分为液压,气动和电动三大类。依据需求也可由这三种范例组合并复合式的驱动系统。或者通过同步带、轮系、齿轮等机械传动机构来间接驱动。驱动系统有动力装置和传动机构,用以实行机构发生相应的动作,这三类根本驱动系统的各有特点,现在主流的是电动驱动系统。
由于低惯量,大转矩交、直流伺服电机及其配套的伺服驱动器(交换变频器、直流脉冲宽度调制器)的普遍接纳。这类系统不需能量转换,运用方便,控制灵敏。
大多数电机后面需安装精细的传动机构:减速器。其齿运用齿轮的速率转换器,将电机的反转数减速到所要的反转数,并得到较大转矩的装置,从而降低转速,添加转矩,当负载较大时,一味提升伺服电机的功率是很不划算的,能够在适宜的速率范畴内通过减速器来进步输出扭矩。(就是贵 买不起谐波减速器 唉 )伺服电机在低频运转下容易发热和出现低频振动,长时间和重复性的工作不利于确保其准确性、牢靠地运转。精细减速电机的存在使伺服电机在一个适宜的速率下运转,加强机器体刚性的同时输出更大的力矩。如今主流的减速器有两种:谐波减速器和RV减速
控制系统
现在机器人控制器多接纳较强的ARM系列、DSP系列、POWERPC系列、Intel系列等芯片构成。
由于已有的通用芯片功用及功能上不可以完全满足有些机器人系统在价钱、功能、集成度和接口等方面的要求,这就萌生了机器人系统对SoC(Systemon Chip)技能的需求,将特定的处置器与所需求的接口集成在一同,可简化系统外围电路的设计,减少系统尺寸,并低低成本。比方,Actel公司将NEOS或ARM7的处置器内核集成在其FPGA产品上,构成了一个完整的SoC系统。在机器人技术控制器方面,其研讨主要会合在美国和日本,并有成熟的成品,如美国DELTATAU公司、日本朋立株式会社等。其运动控制器以DSP技术为核心,采用基于PC的开放式结构。
感知系统
内部传感器:用来检测机器人本身状态(如手臂间的角度)的传感器,多为检测位置和角度的传感器。具体有:位置传感器、位置传感器、角度传感器等。
外部传感器:用来检测机器人所处环境(如检测物体,距离物体的距离)及状况(如检测抓取的物体是否滑落)的传感器。具体有距离传感器、视觉传感器、力觉传感器等。
伺服电机
伺服驱动器又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位。
一、伺服电机的分类
分为直流和交流伺服电动机两大类,交流伺服电动机又分为异步伺服电动机和同步伺服电动机,目前交流系统正在逐渐代替直流系统。与直流系统相比,交流伺服电机具有高可靠性、散热好、转动惯量小、能工作于高压状态下等优点。因为无电刷和转向器,故交流私服系统也成为无刷伺服系统,用于其中的电机是无刷结构的笼型异步电机和永磁同步型电机。
1)直流伺服电机分为有刷和无刷电机
①有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对使用环境有要求,通常用于对成本敏感的普通工业和民用场合;
②无刷电机体积小重量轻,出力大响应快,速度高惯量小,力矩稳定转动平滑,控制复杂,智能化,电子换相方式灵活,可以方波或正弦波换相,电机免维护,高效节能,电磁辐射小,温升低寿命长,适用于各种环境。
二、不同类型伺服电机的特点
1)直流伺服电机的优点和缺点
优点:速度控制精确,转矩速度特性很硬,控制原理简单,使用方便,价格便宜。
缺点:电刷换向,速度限制,附加阻力,产生磨损微粒(无尘易爆环境不宜)
2)交流伺服电机的优点和缺点
优点:速度控制特性良好,在整个速度区内可实现平滑控制,几乎无振荡,90%以上的高效率,发热少,高速控制,高精确度位置控制(取决于编码器精度),额定运行区域内,可实现恒力矩,惯量低,低噪音,无电刷磨损,免维护(适用于无尘、易爆环境)。
缺点:控制较复杂,驱动器参数需要现场调整PID参数确定,需要更多的连线。
目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









