









1、作者PPT文档:链接:https://pan.baidu.com/s/1xPcJbAsuEPxbkLei7jtJfg
提取码:akp7
2、代码:链接:https://pan.baidu.com/s/1f5AHab8-4ndgi0RU80BBwQ
提取码:y17j
3、基本公式:sm=K[R|t]M
内容:
1、K为内参,为[f,0,0;0,f,0;0,0,1]
2、F为基础矩阵
使用Ransac和DLt求得F。
3、E 本质矩阵
E=k'Fk
4、Rt和E的关系
5、Mot 为Rt矩阵,大小为3*4,设第一张图片的相机坐标为世界坐标系的原点。
Mot矩阵表示第c个相机与o1原点坐标系的关系,如[R2o1|t2o1] ,[R3o1|t3o1],将o1坐标原点转移到相机3所在的原点世界坐标系的变换矩阵。
6、Str 为o1为原点的建立的三维空间坐标
7、ObsVal为图像中的匹配点坐标,格式为2*88,前44个点属于图1,后者为图2中的坐标
8、ObsIdx 为三维空间点的索引:在简单的两幅图像情况下,例如共44个点,第一幅图像索引为1:44,第二幅对应45:88;在3幅图像的情况下,共有59个点,其中1:44为1和2对应的空间点,剩余15个为2和3对应的空间点,对应关系为Idx(3,59)=118,其中59表示第59个空间点,3表示第三个相机,118表示点的图像坐标存储在ObsVal的第118列中
9、三角测量:
函数:triangulate.m 中:P=K*[R|t],sm=PM
其中,x为一组图像中的匹配点
Step1,对图像压缩:P=H*P;H=[2/H, 0, -1;
0, 2/W, -1;
0, 0, 1]
对匹配特征点归一化,u=H(1:2;1:2)*x+H(1:2,3)
原公式转换为:sHm=HK[R|t]M,u=Hm,由P=HP,此时su=PM
Step2,系数转换:1)反对称矩阵转换,坐标u^为:[0,X(3),-X(2);-X(3),0,X(1);X(2),-X(1),0]
2)由公式u^PX=0,得4组有效的约束方程,令A=[u1^P1; u2^P2],、
Step3,SVD分解A,求得系数X为三维空间点的齐次形式,X为4*1
Step4,分解X,X=T*[Y’,1],Y的初始值为[0,0,0],T=SVD(X’,0),T的大小为4*4,
有su=PM=PTM,由Q=PT,有su=QM
Step5,牛顿法迭代优化Y,计算残差,e=QM/s-u
计算更新Y
迭代结束后得,X=T*[Y’,1]
Step6,迭代计算当前两幅图所有的点,并转换为3维坐标。
10、BA
Step1:由旋转矩阵计算旋转轴和旋转角度:

上述公式展开为以下矩阵形式:
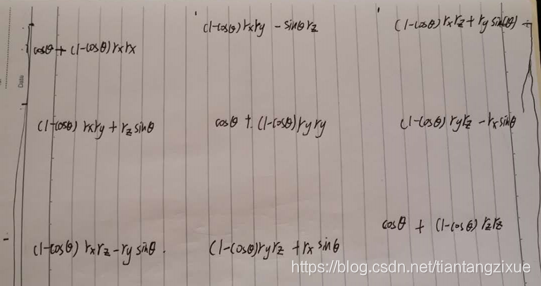
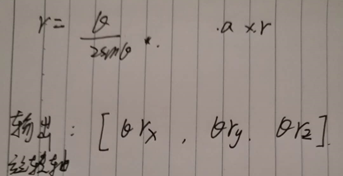
求取旋转角度theta和旋转轴(rx,ry,rz)

Step2,由旋转角度和旋转轴计算旋转矩阵,将空间点转移到对应图像中计算误差。
Step3,使用LM算法迭代,误差:图像投影后的坐标损失。
参数迭代:三维坐标3*N,旋转轴和角度(rx,ry,rz),三维平移坐标(Tx,Ty,Tz)
11、融合点云
Step1,以第一幅图片为中心,若第二幅图片为第三幅和第一幅之间的过渡,则满足:
Sm1=K[R1o1|t1o1]X,
Sm2=K[R2o1|t2o1]X [R2o1|t2o1]为2与1的对应guanxi,X为由第一幅图片与第二幅图片得到的空间点,世界坐标系的原点为o1,由两个相机的旋转和平移矩阵确定。
Sm3=K[R2o2|t2o2]X
Sm4=K[R3o2|t3o2]X
A为相机1和2的对应关系,B为相机2和相机3之间的关系
代码:concatRts(invRt(A.Mot(:,:,A.frames==2)), B.Mot(:,:,B.frames==2))
GraphB.Str = transformPtsByRt(GraphB.Str, RtBW2AW);
其中,X1=[R2o1|t2o1]-1*[R2o2|t2o2]*X3, 将o2世界坐标系原点转换至o1世界坐标系原点。X3是以相机坐标系为o2原点估计得到的世界坐标系中的点。[R2o2|t2o2]*X3将X3从原先o2为原点的坐标系转移到以相机2对应的相机中心为原点的坐标系,在通过[R2o1|t2o1]-1将坐标原点转移到o1中。
其等价形式为:
[R2o1|t2o1]*X1= [R2o2|t2o2]*X3
Step 2,更新旋转和平移矩阵:
代码:concatenateRts(GraphB.Mot(:,:,i), inverseRt(RtBW2AW))
[R2o1|t2o1]-1*[R2o2|t2o2],将o2世界坐标系原点转换至o1世界坐标系原点,过渡图片为图片2,
RtBW2AW=[R2o1|t2o1]-1*[R2o2|t2o2]
更新后为:[R2o2|t2o2]*[R2o2|t2o2]-1*[R2o1|t2o1]= [R2o1|t2o1],
将旋转、平移矩阵更新成[R2o1|t2o1]。
以及,图像3转换为:
[R3o1|t3o1]=[R3o2|t3o2]*[R2o2|t2o2]-1*[R2o1|t2o1],
其中, [R3o1|t3o1]为将o1坐标原点转移到相机3所在的原点世界坐标系的变换矩阵。
在后续结算中,以图片3为过渡图像,则有
RtBW2AW=[R3o1|t3o1]-1*[R3o3|t3o3]
其中,[R3o1|t3o1]-1是以第三个相机的原点为坐标系,转移到以o1为原点的坐标系。
Step 3,找出已有点和新添加点
已有点通过intersect函数求取交集,新添加点通过setdiff函数求差集,上述两者的数目总和等于图片中去重后的匹配点数目。
在融合后的数据中添加公共点的匹配对,并在融合后的共有数据ObsIdx
的相应标签下,添加新的匹配对。例如,第2幅图像中和第三幅图像有公共点,将第三幅图像的公共点的位置与第二幅图像相对应。
在新增点的数据中,不仅需要添加对应关系,也需要添加转换到o1为坐标原点的点云数据。
Step 4,三角测量
在之前的三角测量部分,只考虑两幅图像之间的单应,在此处考虑到一个点对应多幅(ncamera>2)图像,使用原理不变,但方程增多,结果也更精确。
Step 5,BA
针对相机c从1到nCam来说,对所有的空间点Str,找出在相机c中存在的点,并将其映射至相机c所在的图像空间中,计算重投影误差。
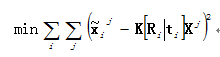
最终将nCam个相机中的误差汇总。使用LM优化算法,优化的参数为空间位置和相机的旋转平移参数,参数量为:3*Npoints+nCam*3*2。
matlab代码:
[vec,resnorm,residuals,exitflag] = lsqnonlin(@(x) reprojectionResidual(graph.ObsIdx,graph.ObsVal,px,py,f,x), [Mot(:); Str(:)],[],[],options);
Step 6,去离群点
Step 7, 再次BA
12、得到最终结果

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









