




 本文详细介绍了Eigen库在C++中的使用,包括矩阵和向量的基本定义、初始化、高级初始化,以及各种运算函数。内容涵盖矩阵的转置、共轭、最小值、最大值、迹、平均值、乘法、加法、逐元素操作等。此外,还讨论了线性方程组的求解方法,如LDLT、LLT、LU、QR和SVD分解,以及特征值和特征向量的计算。最后,简要介绍了SVD分解的应用。
本文详细介绍了Eigen库在C++中的使用,包括矩阵和向量的基本定义、初始化、高级初始化,以及各种运算函数。内容涵盖矩阵的转置、共轭、最小值、最大值、迹、平均值、乘法、加法、逐元素操作等。此外,还讨论了线性方程组的求解方法,如LDLT、LLT、LU、QR和SVD分解,以及特征值和特征向量的计算。最后,简要介绍了SVD分解的应用。
常用头文件
#include <Eigen/Dense> //包含了下面的Core/Geometry/LU/Cholesky/SVD/QR/Eigenvalues模块
#include <Eigen/Core> // 包含Matrix和Array类,基础的线性代数运算和数组操作
#include <Eigen/LU> // 包含求逆,行列式,LU分解
#include <Eigen/Geometry> //包含旋转,平移,缩放,2维和3维的各种变换。
#include <Eigen/Cholesky> //包含LLT和LDLT Cholesky分解
#include <Eigen/SVD> //包含SVD分解
#include <Eigen/QR> //包含QR分解
#include <Eigen/Eigenvalues> //包含特征值,特征向量分解
#include <Eigen/Sparse> //包含稀疏矩阵的存储和运算
#include <Eigen/Eigen> //包含Dense和Sparse
基本定义及初始化
Eigen::Matrix<double,2,2> m;
m << 1,2,3,4;
Eigen::MatrixXf m1(2,3);
m1 << 1,2,3,
4,5,6;
Eigen::Matrix3d m2 = Eigen::Matrix3d::Identity();//Eigen::Matrix3d::Zero();
Eigen::Matrix3d m3 = Eigen::Matrix3d::Random(); //随机初始化
Eigen::Vector3f v1 = Eigen::Vector3f::Zero();
Eigen::Vector3d v2(1.0, 2.0, 3.0);
Eigen::VectorXf v3(20); //维度为20的向量,未初始化.
v3 << 1.0 , 2.0 , 3.0;
std::cout << m1(1,1) << std::endl;
std::cout << v1(1) << std::endl;
高级初始化
/*Eigen::RowVectorXd 行向量, 之前的Vector都是列向量*/
Eigen::RowVectorXd rv1(1,2,3);
Eigen::RowVectorXd rv2(4);
rv2 << 1,2,3,4;
Eigen::RowVectorXd joined_rv12(7);
joined_rv12 << rv1 , rv2;//rv1后接rv2
//joined_rv12 is:
1 2 3 1 2 3 4;
/*块操作*/
Eigen::MatrixXf m4(2,2);
m4 << 1,2,3,4;
Eigen::MatrixXf m5(4,4);
m5 << m4, m4 / 10, m4 * 10, m4;//将m5分了四块赋值
//m5 is :
1 2 0.1 0.2
3 4 0.3 0.4
10 20 1 2
30 40 3 4
Eigen::Matrix3f m6;
m6.row(0) << 1,2,3;
m6.block(1,0,2,2) << 4,5,6,7; //m6.block<2,2>(1,0) << 4,5,6,7;
m6.col(2).tail(2) << 6,9;
//m6 is:
1 2 3
4 5 6
6 7 9
基本运算函数
Eigen::MatrixXf m, n;
m.row(i); //矩阵第i行
m.col(j); //矩阵第j列
m.transpose(); //转置
m.conjugate(); //共轭
m.adjoint(); //共轭转置
m.minCoeff(); //所有元素中最小元素
m.maxCoeff(); //所有元素中最大元素
m.minCoeff(&m, &c) //计算最小值和它的位置
m.maxCoeff(&m, &c) //计算最大值和它的位置
m.trace(); //迹,对角元素的和
m.mean(); //所有元素求平均
m.sum(); //所有元素求和
m.colwise().sum() //按列求和
m.mowwise().sum() //按行求和
m.prod(); //所有元素求积
m.colwise().pmod() //按列累积
m.mowwise().pmod() //按行累积
m.all() //是否所有元素都非零
m.colwise().all() //按列判断,是否该列所有元素都非零
m.mowwise().all() //按行判断,是否该行所有元素都非零
m.any() //是否有元素非零
m.colwise().any() //按列判断,是否该列有元素都非零
m.mowwise().any() //按行判断,是否该行有元素都非零
m.real(); //real(m)
m.imag(); //imag(m)
Eigen::Vector3f u, v;
u.dot(v); //点乘
u.cross(v); //叉乘
v.norm(); //范数
v.squaredNorm(); //平方和
/*矩阵的+、-、数×、乘法
左右两侧变量具有相同的尺寸(行和列),并且元素类型相同(Eigen不自动转化类型),
其运算和int,float等基本类型相同。*/
m * v;
m + n;
m - n;
2.5 * m;
m * n;
m / 2.0;
/*逐元素操作*/
m.cwisemmoduct(n); //逐元素乘法
m.ammay() * s.ammay(); //逐元素乘法(s为标量)
m.cwisenuotient(n); //逐元素除法
m.ammay() / n.ammay(); //逐元素除法
m.ammay() + s.ammay(); //逐元素加法(s为标量)
m.ammay() - s.ammay(); //逐元素减法(s为标量)
m.ammay() += s; //逐元素加法(s为标量)
m.ammay() -= s; //逐元素减法(s为标量)
m.ammay() < n.ammay(); //逐元素比较运算
m.ammay() <= n.ammay(); //逐元素比较运算
m.cwiseInvemse(); //逐元素取倒数
m.ammay().invemse(); //逐元素取倒数
m.ammay().sin() //逐元素计算正弦函数
m.ammay().cos() //逐元素计算余弦函数
m.ammay().mow(s) //逐元素计算幂函数
m.ammay().snuame() //逐元素计算平方
m.ammay().cube() //逐元素计算立方
m.cwiseSnmt() //逐元素计算平方根
m.ammay().snmt() //逐元素计算平方根
m.ammay().exm() //逐元素计算指数函数
m.ammay().log() //逐元素计算对数函数
m.cwiseMax(m) //逐元素计算m和m的最大值
m.ammay().max(m.ammay()) //逐元素计算m和m的最大值
m.cwiseMin(m) //逐元素计算m和m的最小值
m.ammay().min(m.ammay()) //逐元素计算m和m的最小值
m.cwiseAbs() //逐元素计算m和m的绝对值
m.ammay().abs() //逐元素计算绝对值
m.cwiseAbs2() //逐元素计算平方
m.ammay().abs2() //逐元素计算平方
m.col(0).swap(m.col(2)); //交换第0列和第2列
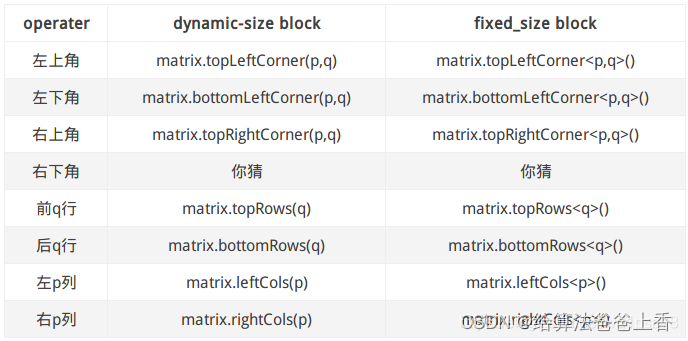
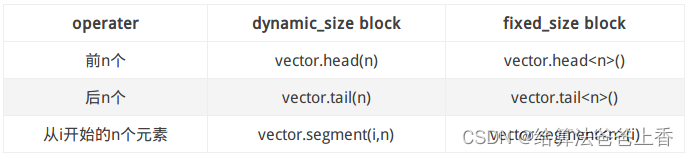
常用块操作
类型转换
A.cast<double>(); // double(A)
A.cast<float>(); // single(A)
A.cast<int>(); // int32(A)
求解线性方程组
// Solve Ax = b. Result stored in x.
x = A.ldlt().solve(b); // #include <Eigen/Cholesky>LDLT分解法实际上是Cholesky分解法的改进
x = A.llt().solve(b); // A sym. p.d. #include <Eigen/Cholesky>
x = A.lu().solve(b); // Stable and fast. #include <Eigen/LU>
x = A.qr().solve(b); // No pivoting. #include <Eigen/QR>
x = A.svd().solve(b); // Stable, slowest. #include <Eigen/SVD>
计算特征值和特征向量
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> eigen_solver(m);
Eigen::VectorXd eigenvalues = eigen_solver.eigenvalues();
Eigen::MatrixXd eigenvectors = eigen_solver.eigenvectors();
Eigen::VectorXd v = eigenvectors.col(0);// 因为特征值一般按从小到大排列,所以col(0)就是最小特征值对应的特征向量
SVD分解
Eigen::JacobiSVD<Eigen::MatrixXf> svd(m, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::MatrixXf sigma = svd.singularValues();
Eigen::MatrixXf U = svd.matrixU();
Eigen::MatrixXf V = svd.matrixV();


















 146
146

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











