







 本文介绍了四轴无人机项目中基于Freertos的操作系统使用,主要关注main函数。硬件初始化后,创建任务以实现系统任务切换。代码风格整洁,注释规范。文中提到Freertos作为轻量级操作系统,首次应用于小型四轴飞行器,期待观察其实效。后续将深入探讨任务调度和姿态解算控制。
本文介绍了四轴无人机项目中基于Freertos的操作系统使用,主要关注main函数。硬件初始化后,创建任务以实现系统任务切换。代码风格整洁,注释规范。文中提到Freertos作为轻量级操作系统,首次应用于小型四轴飞行器,期待观察其实效。后续将深入探讨任务调度和姿态解算控制。
先看看整个工程的任务关系
手机APP是需要自己开发APP的,暂时没空搞,坐等官方。。
然后主要就是上位机和遥控器的使用了
上位机通过USB连接四轴,需要烧录固件BootLoader
遥控器使用NFR无线通信,这个也是可玩性最高的地方,当然也是最核心的部分—姿态解算和姿态控制,之后主要要研究的就是这块代码
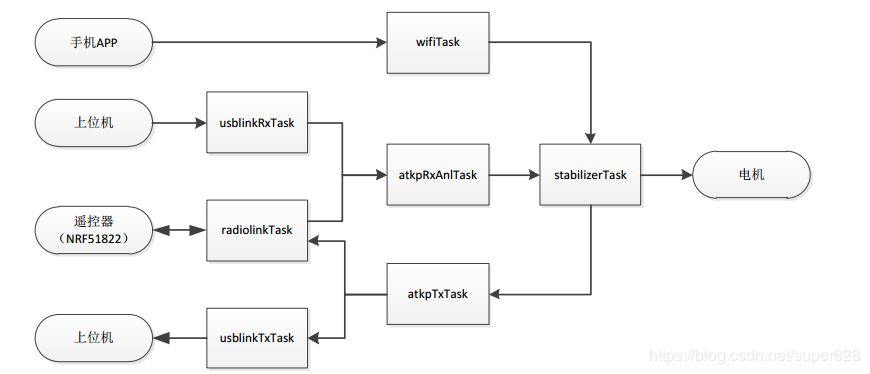
整个系统是基于Freertos系统,所以函数也是在系统中进行任务切换
看下main函数部分:
首先说下代码风格很喜欢,可能是强迫症,注释必须对其
#include "system.h" /*头文件集合*/
TaskHandle_t startTaskHandle
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1021
1021

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











