



ProfControl V8
- PCV8教程
- 任何转载请添加本页链接地址
一、什么是ProfControl V8
ProfControl是一款专注于自动控制系统的上位机软件,它由讯易铂控团队开发,历时9年时间从初代发展到了最新的V8版本。ProfControl起步于Agv调度系统,目前已经延申到WCS/WMS/MES/三维可视化等众多领域。
为了满足不同场景、不同设备、不同现场的需求,ProfControl采用了组态化设计,系统由底层框架、算法单元、工具链、地图编辑器等基础单元构成,旨在达到一款软件配合不同的工程文件解决不同场景需求的目标。
ProfControl的核心使命包括以下几点:
-
安全稳定
ProfControl采用了组态化设计思路,系统本身是一个算法集和工具集,任何项目都是通过地图编辑+二次开发实现,所以避免了工程师在现场进行底层代码编程和调试的工作,极大的提高了稳定性,同时也降低了不同水平工程师实施项目导致差异化的风险。简单来说ProfControl迭代的系统本身稳定了,现场就稳定可靠了。 至于安全性方面,由于ProfControl秉承几乎不用第三方工具包、程序集的理念,所以ProfControl不会受制于任何版权问题。
-
极高的设备兼容性和通讯兼容性
ProfControl内嵌了几乎全部常用的通讯手段(Tcp/IP、Http、ModBus、HTTP、Mqtt、S7、OPC等),并且通过脚本编程可以迅速接入任何一个厂家的设备,此类设备包括但不限于Agv、Rgv、电动门、电梯、转盘、电子围栏等。同时ProfControl对于市面上主流厂家的协议已经完全接入,包括仙工、科聪、斯坦德、新松等
-
迅捷开发
迅捷开发是ProfControl最关注的指标,系统提供了类似于AutoCAD般的地图编辑器,同时提供了类似于VsCode般的IDE工具,配合属性管理器调节内部算法集的参数,可以非常便捷的接入设备,实现现场控制逻辑。
-
多平台支持
为了同时满足高性能和多平台的需求,ProfControl采用了C/S+B/S双架构方案。C/S方案具有极高的运算性能,配合自研的地图引擎可以实现30k+地图元素的流畅编辑,同时配合高效算法集可以实现百车规模的高效调度;B/S方案具有极强的跨平台特性,同时可兼容电脑、平板、手机、PDA、智能电视等一切具有标准浏览器的设备。
-
用户可以自学自用
ProfControl系统目标是服务整个自动控制行业,是一款标准化软件,我们除了采用组态开发外,同时提供了大量的教程和视频资料以供用户学习。
推荐快速了解
⭕ 教程推荐
二、核心功能
⭕ 自研的地图引擎
自动控制行业的应用场景,存在超大规模厂房、超多设备数量等需求,普通的商用二维引擎(Qt、WPF、Swing等)很难满足流畅编辑和使用的要求。ProfControl自研了基于显卡高速绘制的地图引擎,支持在5000元左右轻薄本的硬件条件下流畅显示50000个地图元素(站点、路径、图片及车体等)的能力。
⭕ 强大的地图编辑器
ProfControl具有完善的地图编辑功能,除了可以导入CAD或者通过脚本导入其他系统地图的能力外,系统提供了类似CAD软件般的地图编辑功能。
⭕ 便捷的属性配置
ProfControl内置了很多地图元素模型(车体、站点、路径等),同时还内置了很多算法集,通过在属性栏简单的修改值,勾选配置即可满足小到光伏领域花篮车大到无人矿卡、集装箱AGV的全部适配!
⭕ 用户脚本编程(二次开发)
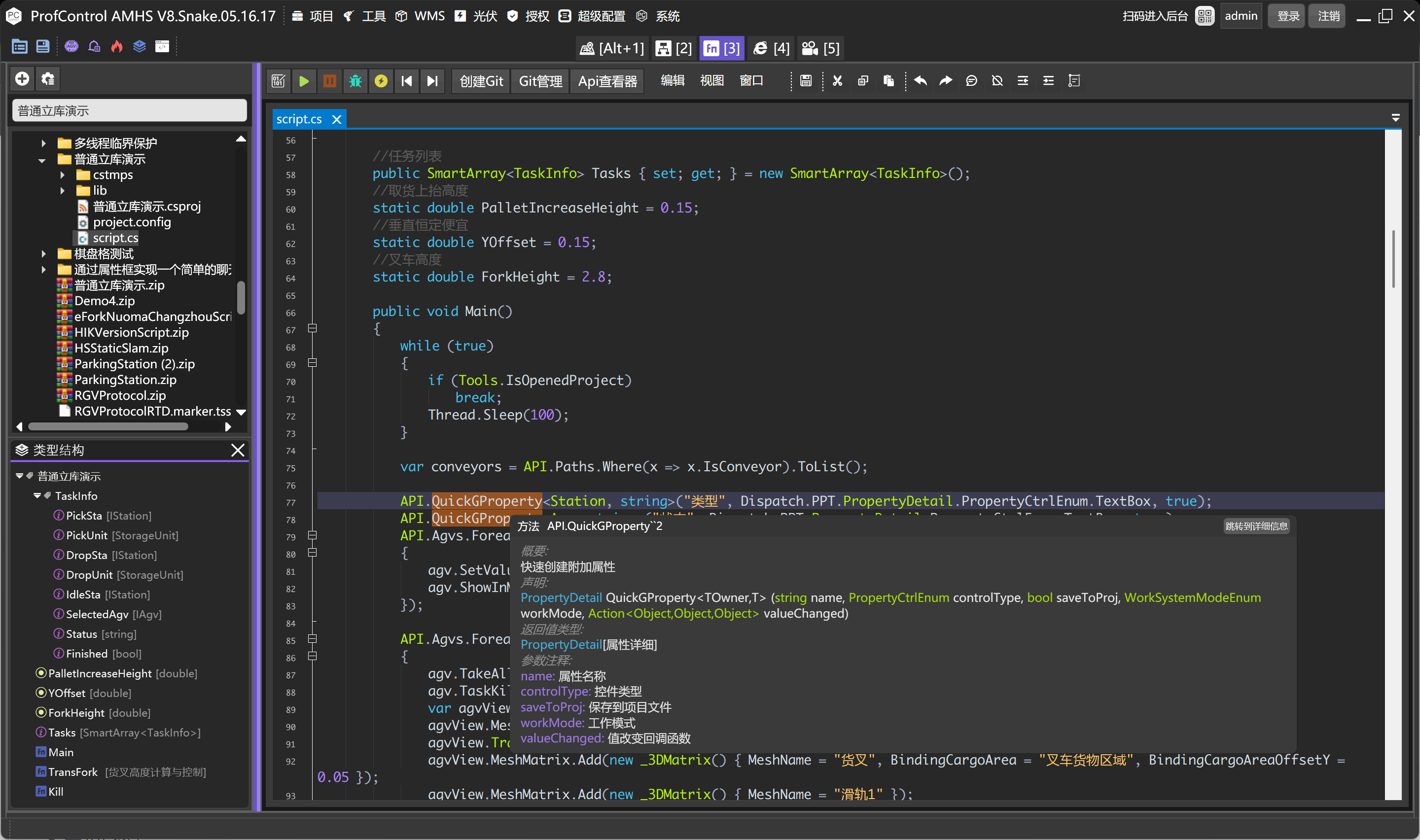
脚本编程是ProfControl非常重要的功能,它提供了用户通过系统实现任何项目需求的能力!通过脚本编程我们可以实现
-
项目流程开发
-
通讯协议对接
-
各种车体或现场设备的控制
-
数据收集与展示
-
与第三方系统对接
此外,ProfControl还提供了程序调试器(Debug)功能,让用户可以方便的进行脚本程序调试,例如“断点”、“单步执行”、“查看变量”等。
⭕ 迅捷开发
ProfControl设计主旨便是“快”,这个快体现在多个方面:
-
地图快捷设计
-
工具和算法的快速配置(属性管理器)
-
支持仿真,项目实施前即可完成整厂运行部署
-
丰富的脚本API,用户只需要极少量的脚本代码即可实现复杂的流程控制与设备控制
⭕ C/S及B/S双架构
为了同时满足性能和多平台的需求,ProfControl系统采用了双架构的方案,在算法层面追求极致的运算速度,在地图绘制层面追求极高的操作流畅度,在多平台应用上追求开箱即用。
- C/S架构
- 即运行在Windows/Linux上的专用UI界面,也是用户看到的ProfControl的主界面。C/S架构具有最优的硬件设备调用性能,所以例如Photoshop、WPS、AutoCAD,Solidworks等几乎所有与性能相关的系统都一定优先选择该架构方案。
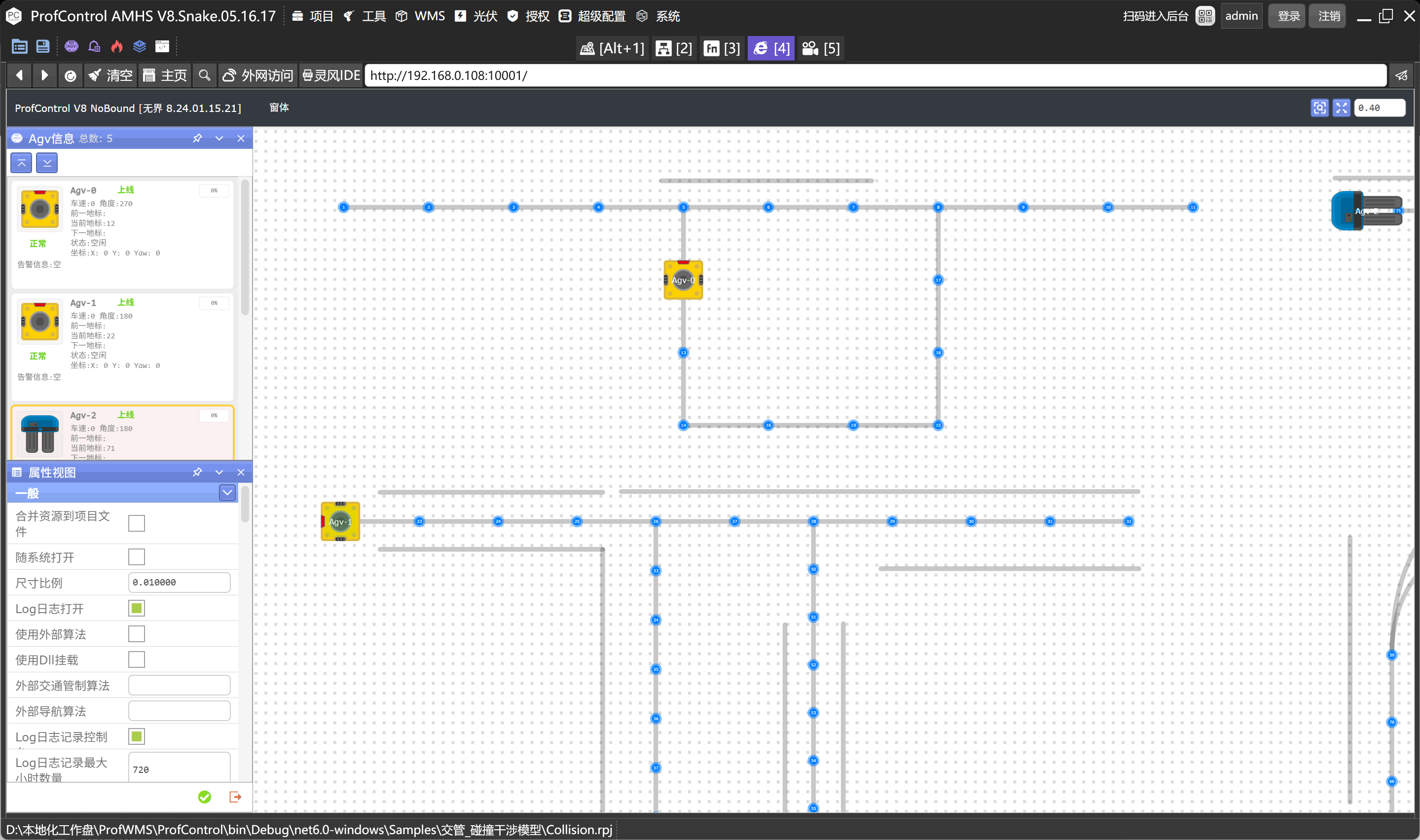
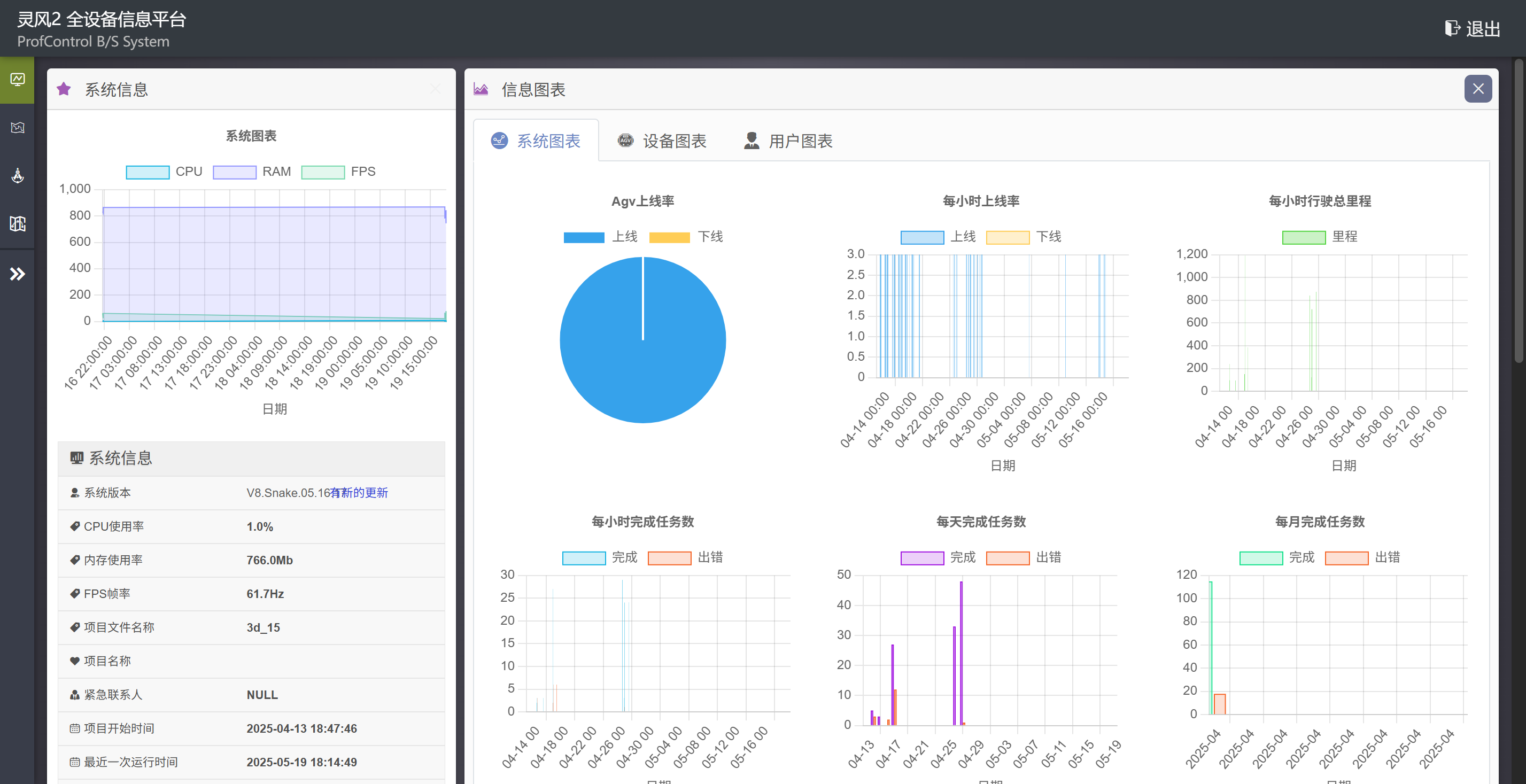
- B/S架构(Web端架构)
- 系统运行在工控机/服务器上,通过Web浏览器进行访问的UI界面。由于使用Http通讯,使得Web端架构可以运行在任何一个具有浏览器功能的设备上,该架构主要用于工业看板、中央大屏、呼叫PAD等。
⭕ 支持软件仿真和数字孪生
ProfControl提供了软件仿真和数字孪生功能。通过软件仿真我们可以在项目实施之前完整搭建现场环境,进行纯软件模拟运行。通过软件仿真我们具备以下几个优势:
-
提供投标演示视频
-
预先查找到项目规划的缺陷
-
预先验证交通管制的合理性,并且可以作为参考优化交管效率
⭕ 极其丰富的工具链
ProfControl提供了非常多的工具集合,以实现迅捷开发的需求。这些工具包括但不限于:
-
属性配置器
-
告警窗口
-
任务监视窗口
-
Log日志自动记录工具与查看工具
-
脚本API查看器
-
数据库查看器
-
脚本变量监视器
-
快速信号查看器
-
列表显示器
-
超级配置中心
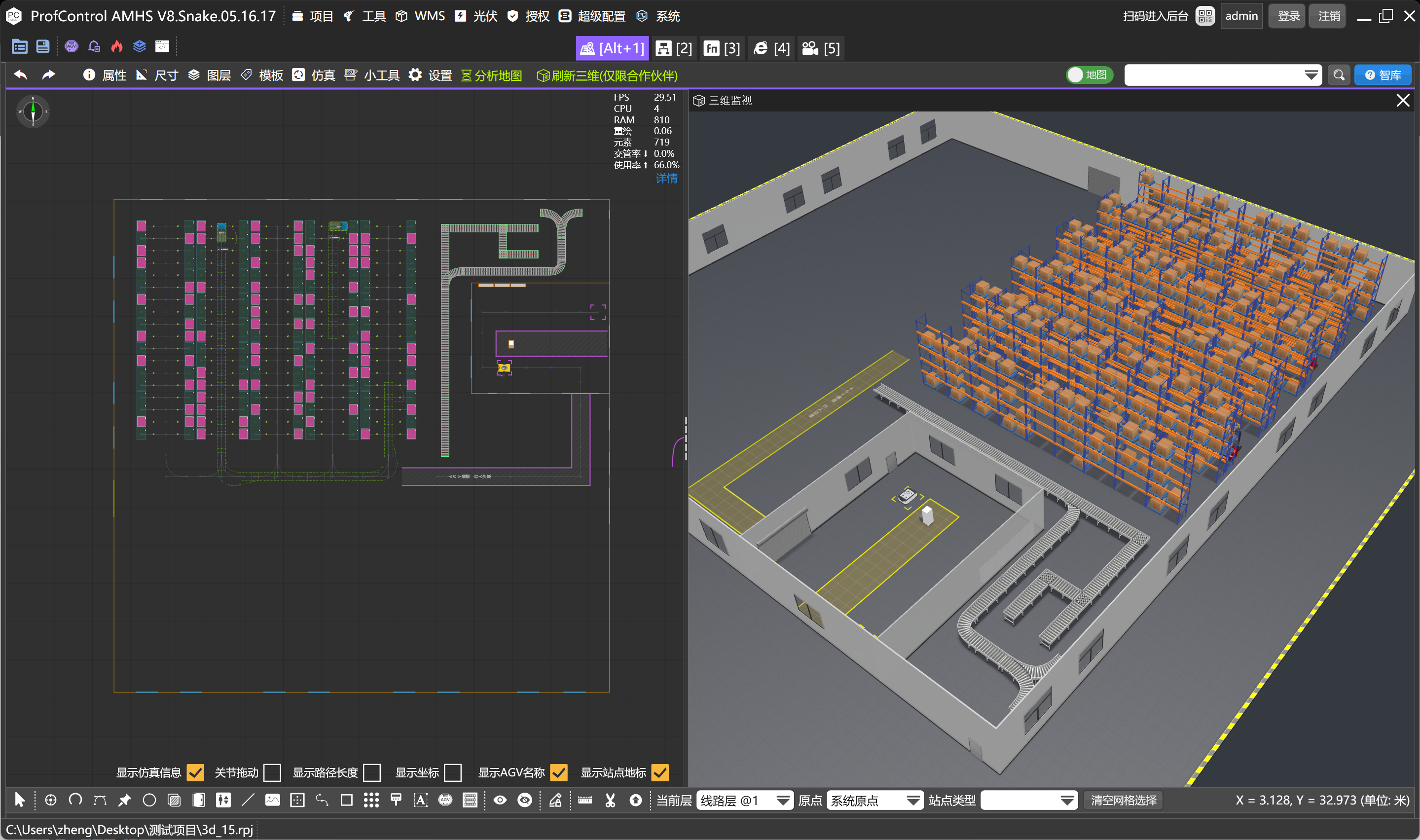
⭕ 三维可视化
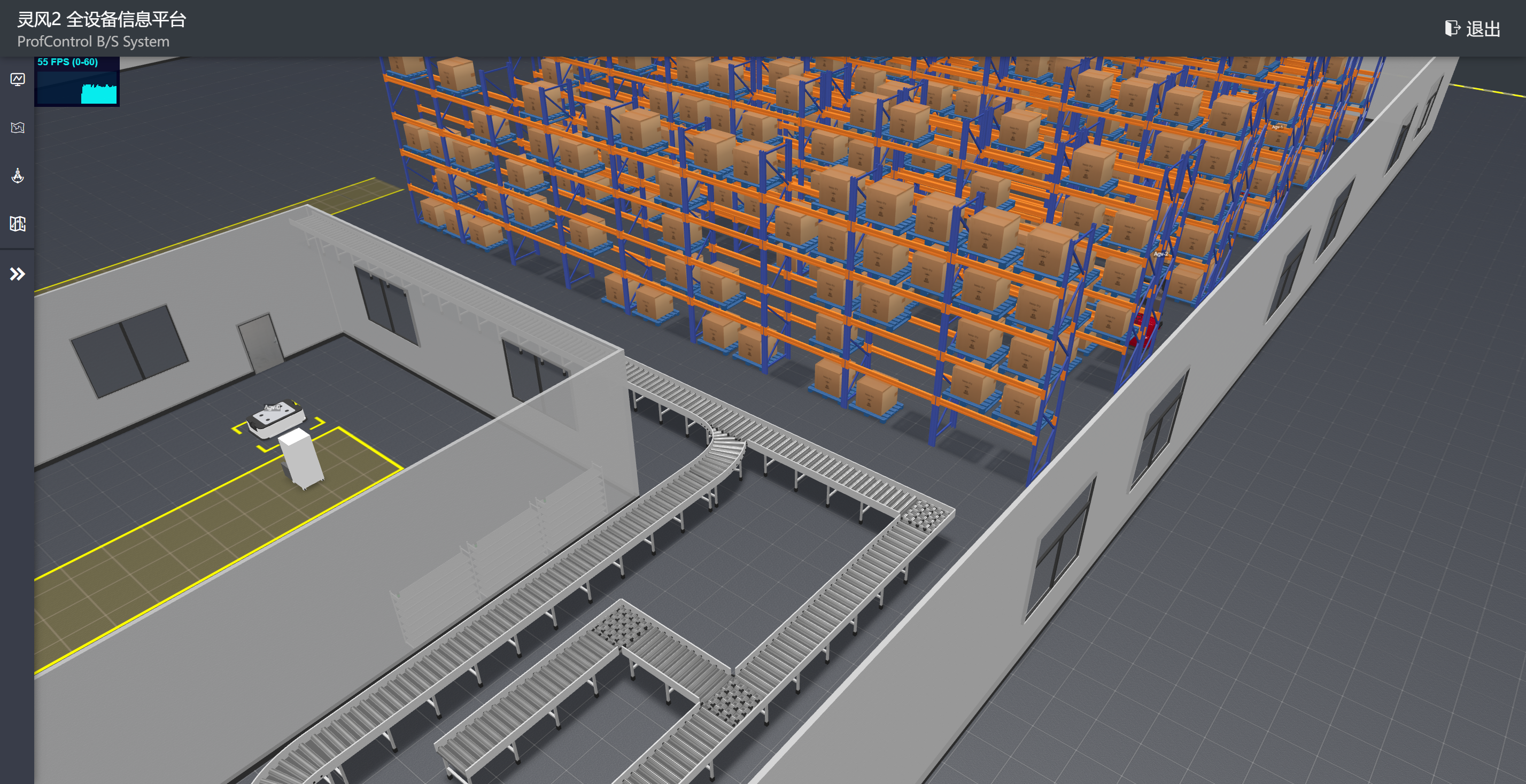
ProfControl内置了三维可视化一键切换功能,用户在二维地图编辑器设计完成后,可一键切换为三维显示!
三、性能(推荐硬件配置实测数据)
⭕ UI性能
UI性能主要评估在大量地图元素下,整体系统的流畅度。
-
1.大地图规模下,系统平均帧率
在50000个地图元素的场景下,按照下文推荐配置的硬件条件,帧率不低于60fps。
-
2.大地图规模下,窗体响应延迟
在50000个地图元素的场景下,打开各窗口延时时间小于100ms。
⭕ 通讯性能
通讯性能主要评估同时建立连接的数量,该性能与通讯库的处理方式相关。
-
1.最大通讯链路数
以Tcp/IP链路为例,并发通讯数不少于1000条。
-
2.通讯响应时间
仅测量应用层通讯响应,不计算AP-CP的硬件响应,在200条Tcp/IP链路下,平均并发响应时间为1-5ms。
-
3.通讯保活率(KeepAlive)
不考虑AP-CP硬件断链的情况,系统通讯保活率100%。通讯不会因为软件系统被迫中断。
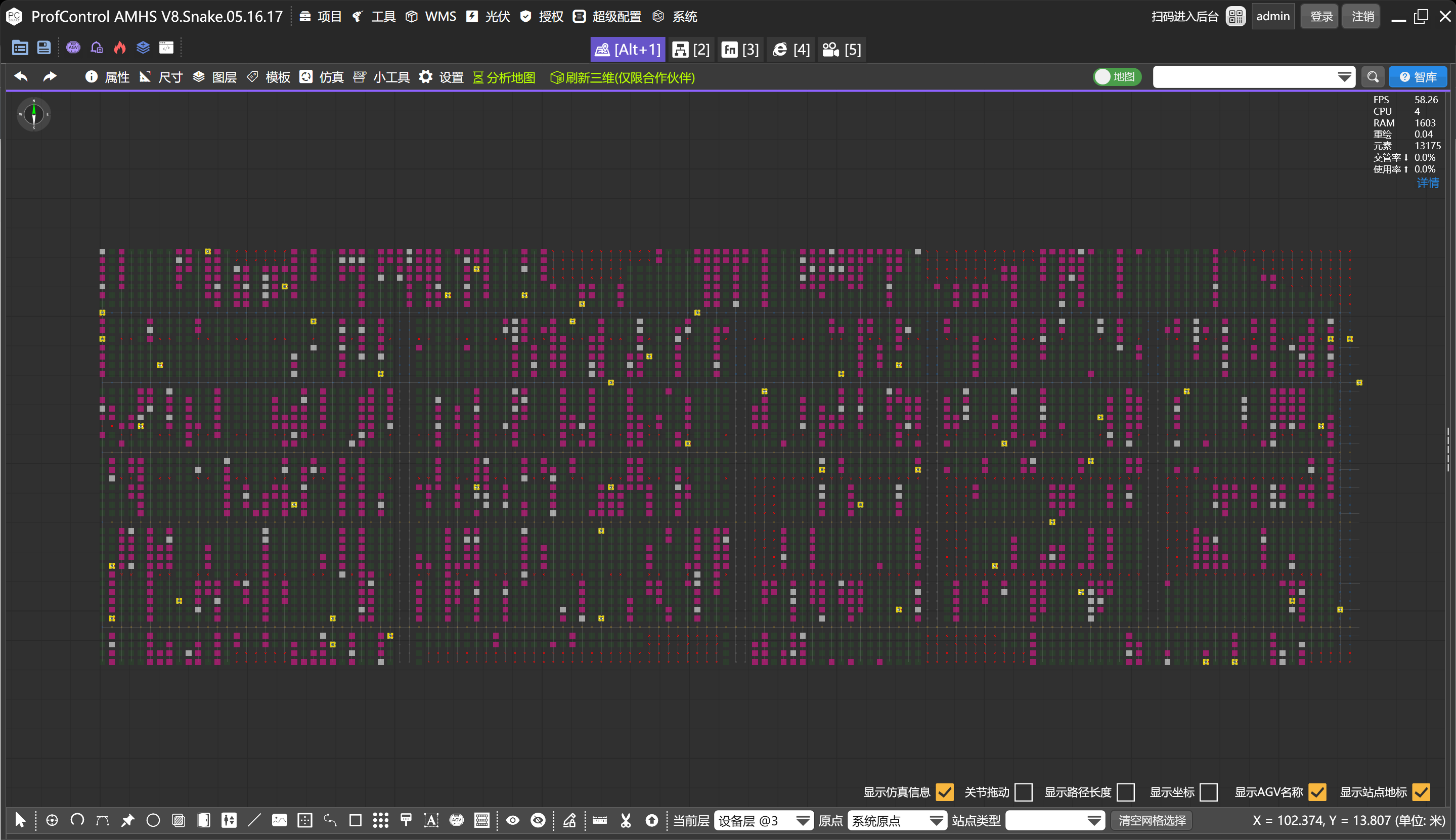
⭕ 路径规划性能
路径规划性能评估复杂路径情况下,系统对于路径规划的速度。
-
1.超大规模地图
在10000个节点的棋盘格地图,100辆Agv的测试环境下,在 不打开 结构干涉 算法情况下,平均导航时间30ms。
在10000个节点的棋盘格地图,100辆Agv的测试环境下,在 打开 结构干涉 算法情况下,导航时间范围为[500ms - 1200ms]。
-
2.超远距离导航
在10000个节点的棋盘格地图,100辆Agv的测试环境下,在 不打开 结构干涉 算法情况下,左下角导航到右上角的导航时间250ms。一个棋盘格地图中,左下到右上是对角线长度也是最远距离。
在10000个节点的棋盘格地图,100辆Agv的测试环境下,在 打开 结构干涉 算法情况下,左下角导航到右上角的平均导航时间3600ms。
⭕ 交通管制性能
交通管制性能评估:
-
1.交管计算效率(路径规划完成后,计算出确认路径的时间)
在900个节点的棋盘格地图中,10辆Agv的测试环境下,交管计算计算时间范围为[2ms-45ms]。
在2500个节点的棋盘格地图中,30辆Agv的测试环境下,交管计算计算时间范围为[20ms-220ms]。
-
2.拥堵解算效率(交管后解除交管的时间)
棋盘格地图解算难度低,在2500个节点的棋盘格地图中,30辆Agv的测试环境下,平均拥堵解算时间为5s。
在以长直路为主的,1000个节点的地图中,50辆Agv的测试环境下,平均拥堵解算时间为13s。
-
3.车辆稼动率(运动车辆数/总车辆数)
棋盘格地图由于关联路径多,所以车体稼动率高,一般可以达到75%以上。
以长直路为主的地图,如果临时停靠点少,车流量大,车辆稼动率一般在50%-60%左右。
⭕ 最大设备接入数
最大设备接入数是几种性能指标的结合指标,它主要考察“通讯性能”、“路径规划性能”及“交通管制性能”这三个方面
-
1.最大Agv/Rgv/穿梭车等接入数
棋盘格地图中,最大Agv接入数不低于150台。当需求超过这个数量,请在推荐配置的基础上提高硬件配置,主要需要提高CPU的配置。
环行线路下,最大Agv接入数不低于300台。当需求超过这个数量,请在推荐配置的基础上提高硬件配置,主要需要提高CPU的配置。
四、覆盖行业(以ProfControl案例列举)
- ■ 智能工厂
- ■ 智慧物流
- ■ 半导体行业
- ■ 光伏行业
- ■ 医药生产
- ■ 烟草生产
- ■ 电力巡检行业
- ■ 煤矿井下作业
- ■ 汽车加工业
- ■ 机加工行业
- ■ 矿业运输
- ■ 码头运输
- ■ 食品生产行业
- ■ 包装行业
- ■ 军用领域
五、支持设备(包括但不限于)
移载类型
- ■ Agv
- ■ Rgv
- ■ 叉车
- ■ 晶圆搬运车
- ■ 晶圆花篮车
- ■ 重载AGV
- ■ Kiva
- ■ 穿梭车
- ■ 四向穿梭车
- ■ 堆垛机
- ■ 协作机器人
- ■ 无人卡车(矿卡)
厂区常见类型
- ■ 电动门
- ■ 电梯(包含升降梯和普通电梯)
- ■ 转盘
- ■ 输送线
- ■ 机器人(机械手)
- ■ 滚筒线
- ■ 皮带线
告警标识类型
- ■ 红绿灯
- ■ 区域示廓灯
- ■ 射灯
- ■ 地面安全灯带
安全防护类型
- ■ 电子围栏
- ■ 道闸
- ■ 联动安全门
- ■ 安全光栅
六、支持的通讯
ProfControl支持所有工业领域的基础通讯方式,其中常用的部分系统提供了迅捷开发工具,包括:
- 1.Tcp/IP (TCP、UDP)
- 2.Modbus
- 3.Http
- 4.MQTT
- 5.S7
- 6.OPC
ProfControl通过脚本可以完成任何一个设备的控制协议开发和设备对接,目前已直接支持“仙工”、“科聪”、“斯坦德”、“新松”等控制协议。任何厂家的任何设备均可以通过通讯脚本开发进行对接。
七、系统安全与版权
1.系统安全
ProfControl采用了内核封闭策略、多环境(C++/C#)嵌套策略,是一款安全的,不易被破坏、修改及勒索的软件系统。
ProfControl的Web端在客户《网络安全审查》申请中,通过率100%。
2.版权
1.使用ProfControl的版权安全
ProfControl系统具有完备的《软件著作权证书》,系统承诺几乎不使用第三方程序集,除必要的.Net平台程序集外,未使用任何未付费的程序集或版权不明的程序集。所以在任何严苛的项目版权审查中通过率100%。
2.ProfControl的使用权
- ■ ProfControl提供了试用版本,使用权为个人15天
- ■ ProfControl提供了教育版本,使用权为个人3个月
- ■ ProfControl提供了年费版本,使用权为个人1年
- ■ ProfControl提供了企业版本,使用权为项目永久
- ■ ProfControl提供了高效教材版本,使用权为个人7个月
八、系统运行环境
硬件
推荐配置
ProfControl不一定需要服务器规模的设备,企业用户推荐使用工控机,一般开发人员、规划设计师及学生老师推荐采用普通台式电脑或者笔记本电脑即可。
-
CPU:采用当前主流CPU,Intel或AMD品牌均可,X86架构64位的CPU。核心数不小于4核,推荐采用8核以上CPU,单核主频最高可达3.7GHz。参考型号:i5-14600KF或以上。
-
内存:采用当前主流RAM,支持DDR4,总线频率不低于2666。推荐参数:16G DDR4 3200或以上。
-
硬盘:由于ProfControl具有自动Log日志、本地Redis等功能,请使用固态硬盘,推荐参数:512GB/1TB SSD固态硬盘。
-
显卡:由于ProfControl自研地图引擎采用了显卡渲染,在项目地图复杂的情况下推荐使用较好的显卡,一般地图规模推荐:GTX1060/GTX1660S 复杂场景推荐:RTX2060S。
-
显示器:显示器根据现场实际情况选用,为了更好的显示ProfControl全貌,请确保显示器配合显卡可以达到至少1920*1080分辨率。
⭕ 不同台数下推荐配置
注意:这是根据各种场景下平均数据作为参考值的推荐,由于场景、地图规模、地图模型对于算法需求的差异,具体车辆数和配置对应关系,存在一定差异。
| 配置(驱动Agv数量) | CPU | 内存 | 显卡 | 备注 |
|---|---|---|---|---|
| 最低配置 (1-10台) | i3-12100F / AMD 锐龙 R5 5600X | 8G DDR4 2666 | 集成显卡或GTX960 | 不推荐该配置 |
| 普通配置 (1-30台) | i5-13490F / AMD 锐龙5 7500F | 8G DDR4 2666 | GTX1060/GTX1660S | 内存可以扩展为16G |
| 推荐配置 (1-100台) | i5-14600KF / AMD 锐龙 5 9600X处理器(R5) | 16G DDR4 3200 | RTX2060S | |
| 高性能配置 (1-300台) | Intel Ultra 7 265K/AMD 锐龙 9 9900X处理器(R9) | 32G DDR4 3200及以上 | RTX5070 |
操作系统及环境
1.操作系统
ProfControl运行在Windows系统上,推荐系统Windows 11/Windows 10,如果需要安装在Windows 7上,可能需要安装更多的环境包。
Linux和MacOS用户可以使用虚拟机方案,或者联系我们定制Linux专用版本,我们有相关开发经验。
2.运行环境
.Net 6运行环境及SDK开发包。点击下载
九、注意事项
1.尊重版权
任何对于ProfControl进行逆向破解、修改的行为都是违法的,系统作品受专利和著作权保护。ProfControl团队欢迎任何热爱相关领域的人员参与讨论、开发甚至于共事。HR电话:18021171523。
2.技术支持
ProfControl的技术部门是一个人数不多的团队,我们欢迎交流和提问,但是我们优先解决企业用户的相关问题,您的任何问题都会被重视,只是现阶段我们无法保障那么大规模回复的时效性,请理解!我们发现90%的提问都是教程或者视频墙中有解决方案的,请珍惜我们教程的劳动成果,多查阅多搜索!
3.安全问题
不要依赖基于无线通讯的上位机软件解决工业现场的安全隐患问题!
4.开放策略
ProfControl团队的教程不仅仅是系统使用说明书,我们同时在努力为这个茁壮成长的行业添砖加瓦,我们会提出一些“本不存在”的定义,提供一些“无中生有”的算法策略,我们不想“人与亦云”,不要“拿来主义”。一定跟忠实用户们一起创造、一起推进行业的进步和革新!


















 10万+
10万+




 到【灌水乐园】发言
到【灌水乐园】发言







