




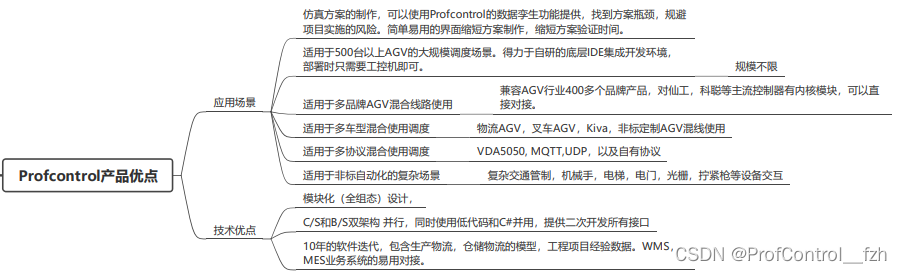
 ProfControlV8是一款面向智能工厂和智慧物流的全组态控制系统,支持AGV配置、地图绘制、导航算法和协议设置。用户可进行地图绘制,AGV视图和模型配置,以及AGV仿真导航和协议配置。系统采用先进UI设计,提升图形性能,兼容多种导航方式,满足复杂环境的导航需求。
ProfControlV8是一款面向智能工厂和智慧物流的全组态控制系统,支持AGV配置、地图绘制、导航算法和协议设置。用户可进行地图绘制,AGV视图和模型配置,以及AGV仿真导航和协议配置。系统采用先进UI设计,提升图形性能,兼容多种导航方式,满足复杂环境的导航需求。
目录
ProfControl V8是一款全组态的面向智能工厂及智慧物流的自动化控制系统。
ProfControl V8是一款全组态的面向智能工厂及智慧物流的自动化控制系统。

-
先进的UI设计以满足日益增长的现场设备数量,确保在极度复杂的地图及设备情况下的高效运行。
全新的UI系统采用了最新的图形化技术,可以满足场景中同时拥有50k+以上元素的需求。比v6图形性能提高不低于20倍。
- 完全兼容磁导航、二维码导航及激光SLAM导航的全新的地图系统。
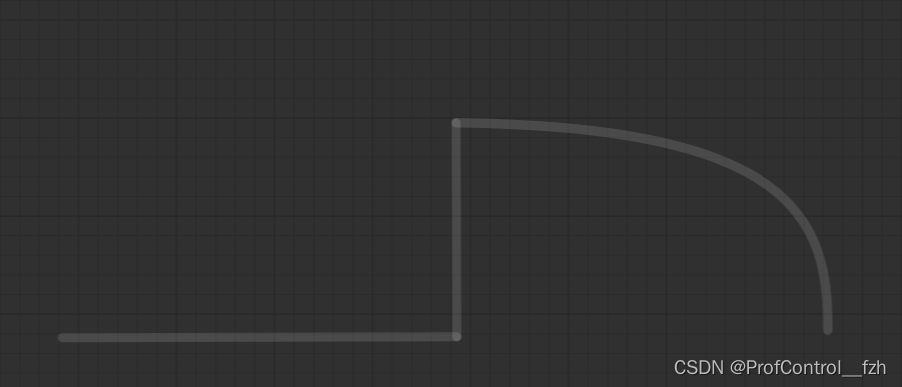
增加了贝塞尔路径、复合路径、B样条等全新的路径,完美支持SLAM导航中各种奇怪且特殊的行驶路径需求。
- 全新的导航算法,以满足复杂的棋盘格及SLAM导航需求。
基于遗传算法的全新导航规划,可以轻松应对复杂棋盘格导航的需求,且对于过道通行能力有限的导航需求具有先天的优势。
- 全新的规则算法,以满足不同现场极端的导航需求。
- 完整内嵌WCS及WMS,满足AllInOne系统的需求。
- 内嵌复杂坐标系统,支持多楼层,多区域的坐标拟合需求。
- 完全独立的协议模板,支持任意拓展各种现场设备。
-
一、简单绘制一个地图
1.按住shift键,用鼠标框选住所画地图
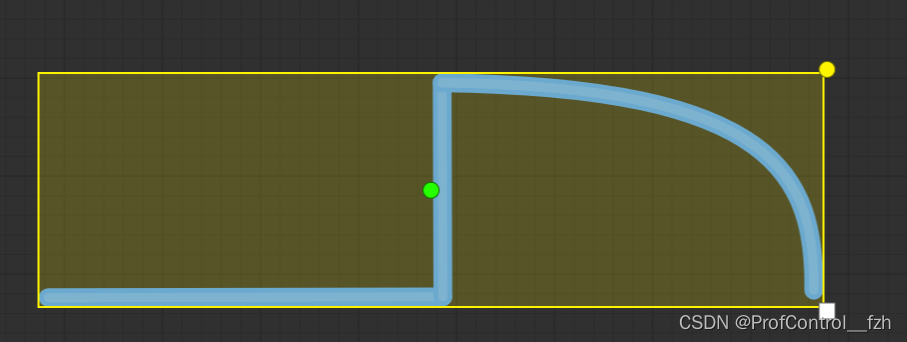
2. 右击点击自动分割相交路径

3.在上方工具栏中的小工具中选择【路径端点添加站点】
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 836
836




 到【灌水乐园】发言
到【灌水乐园】发言







