






首先IIC的概念就略过了。这个网上写的很详细。
从CUBEMX配置完代码开始吧。
手上的项目是一主机,七个从机,从机使用中段收发。
关于地址是一个大坑,后续的读写中断也是个坑。
通讯逻辑:
主机查询模式向从机:
1,发送用户配置HAL_I2C_Master_Transmit(&hi2c1,(SLAVEADD<<1)|0x00,I2CBuf_TxData,IIC_LEN,20);,
2,或读取数据HAL_I2C_Master_Receive(&hi2c1,(SLAVEADD<<1)|0x01,I2CBuf_RxData,IIC_LEN,20);。
相应的: 从机打开中断:
1,接收用户配置数据HAL_I2C_SlaveRxCpltCallback;
2,发送数据HAL_I2C_SlaveTxCpltCallback。
从机地址:
硬件为I2C_ADDRESSINGMODE_7BIT时的从机地址时,从机的地址需要左移一位,最低为表示读或者写。比如从机地址I2COwnAddr = 0x0A,左移一位配置为:
hi2c1.Init.OwnAddress1 = I2COwnAddr<<1;//从机的地址设置需要左移一位
这样从机的配置初始化函数:
/* I2C1 init function */
void MX_I2C1_Init(void)
{
/* USER CODE BEGIN I2C1_Init 0 */
/* USER CODE END I2C1_Init 0 */
/* USER CODE BEGIN I2C1_Init 1 */
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x2000090E;
hi2c1.Init.OwnAddress1 = I2COwnAddr<<1;//从机的地址设置需要左移一位
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/** Configure Analogue filter
*/
if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
{
Error_Handler();
}
/** Configure Digital filter
*/
if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
#ifndef MASTER
// HAL_I2C_Slave_Receive_IT(&hi2c1, I2CBuf_RxData, sizeof(I2CBuf_RxData)); // 启动中断接收
HAL_I2C_Slave_Transmit_IT(&hi2c1, I2CBuf_TxData, sizeof(I2CBuf_TxData)); // 启动中断发送
// HAL_I2C_EnableListen_IT(&hi2c1);
#endif
/* USER CODE END I2C1_Init 2 */
}
然后主机的地址可以忽略,在主机中读取从机的数据,地址需要时从机地址左移一位与上1:
//查询读取从机6个字节数据,从机地址为0X0A
HAL_I2C_Master_Receive(&hi2c1,(0X0A<<1)|0x01,I2CBuf_RxData,6,1000);
向从机发送数据:
HAL_I2C_Master_Transmit(&hi2c1,(0X0A<<1)|0x00,I2CBuf_TxData,6,1000);
中断收发:
主机的比较简单,使用查询来读取发送。从机使用中断需要处理几个回调函数。
从机的HAL库同时配置了接收和发送,从机需要等待随时更新用户配置,接收到用户配置后同时打开用户数据发送中断。
配置函数就是上面的,从机模式可以先使能接受中断:
HAL_I2C_Slave_Receive_IT(&hi2c1, I2CBuf_RxData, sizeof(I2CBuf_RxData)); // 启动中断接收
在这个函数里面,有接收中断,地址终端,监听中断。调用了下面这个
/* Enable ERR, TC, STOP, NACK, RXI interrupt */
/* possible to enable all of these */
/* I2C_IT_ERRI | I2C_IT_TCI | I2C_IT_STOPI | I2C_IT_NACKI |
I2C_IT_ADDRI | I2C_IT_RXI | I2C_IT_TXI */
I2C_Enable_IRQ(hi2c, I2C_XFER_RX_IT | I2C_XFER_LISTEN_IT);
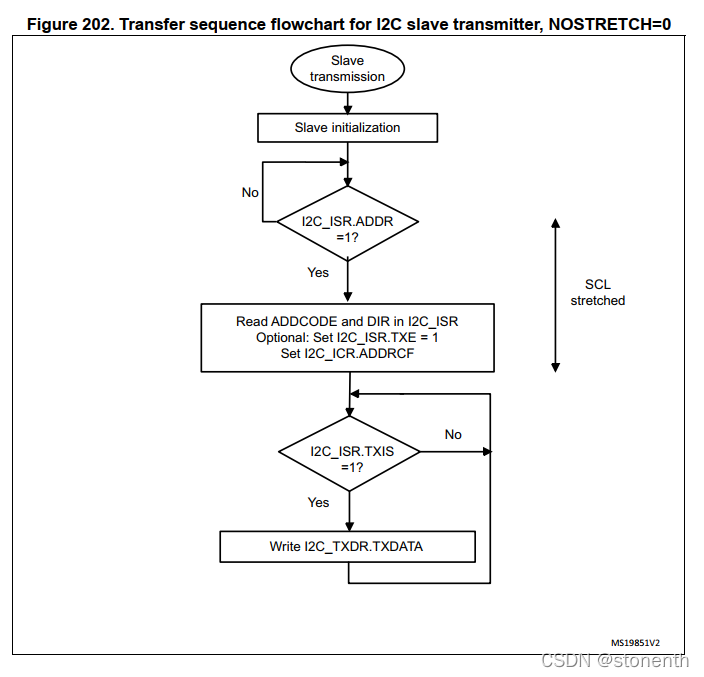
当ADD中断产生后TXIS置位TXIE打开,开始发送数据
好了,发送完成了,然后就是比较坑的了,完成后中断是会被关闭的。。。
所以啊还需要在发送完成回调函数里面再次打开,简单一句,浪费我好多天才跟踪到(划水划水)
void HAL_I2C_SlaveTxCpltCallback(I2C_HandleTypeDef *hi2c)
{
HAL_I2C_Slave_Transmit_IT(&hi2c1, I2CBuf_TxData, sizeof(I2CBuf_TxData)); // 启动中断发送
}
接收函数也是如此,想再次接受数据就需要再次打开
void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *hi2c)
{
if(hi2c->Instance == I2C1)
{
//PROGRESS READ DATA//SET Static Value
if(I2CBuf_RxData[0] == I2CBuf_RxData[1])
{
//处理数据
//配置完成,进入发送
HAL_I2C_Slave_Transmit_IT(&hi2c1, I2CBuf_TxData, sizeof(I2CBuf_TxData)); // 启动中断发送
}
memset(I2CBuf_RxData,0,sizeof(I2CBuf_RxData));
//同时等待新配置数据
HAL_I2C_Slave_Receive_IT(hi2c, I2CBuf_RxData, sizeof(I2CBuf_RxData));
}
}
当然终端还需要一个错误处理函数。总线很容易锁定。
void HAL_I2C_ErrorCallback(I2C_HandleTypeDef *hi2c)
{
if(hi2c->Instance == I2C1)
{
//从机不再复位总线
// ResetFlag = 1;
// memset(I2CBuf_RxData,0,sizeof(I2CBuf_RxData));
// HAL_I2C_DeInit(hi2c);
// MX_I2C1_Init();
hi2c->Instance->CR1 = 0; //复位PE
hi2c->Instance->CR1 = 1; //解除复位
HAL_I2C_Slave_Receive_IT(hi2c, I2CBuf_RxData, sizeof(I2CBuf_RxData));
HAL_I2C_Slave_Transmit_IT(&hi2c1, I2CBuf_TxData, sizeof(I2CBuf_TxData)); // 启动中断发送
}
}
锁定之后需要总线复位,这里参考网上的改了一点,效果不错。
void HAL_I2C_MspInit(I2C_HandleTypeDef* i2cHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(i2cHandle->Instance==I2C1)
{
/* USER CODE BEGIN I2C1_MspInit 0 */
/* USER CODE END I2C1_MspInit 0 */
/* I2C1 clock enable */
__HAL_RCC_I2C1_CLK_ENABLE();//放到了前面
__HAL_RCC_GPIOB_CLK_ENABLE();
//初始化引脚拉高拉低,复位IIC
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_SET);
i2cHandle->Instance->CR1 = I2C_CR1_SWRST; //复位I2C
i2cHandle->Instance->CR1 = 0; //解除复位
/**I2C1 GPIO Configuration
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
*/
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF1_I2C1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* I2C1 interrupt Init */
HAL_NVIC_SetPriority(I2C1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(I2C1_IRQn);
/* USER CODE BEGIN I2C1_MspInit 1 */
/* USER CODE END I2C1_MspInit 1 */
}
}
应该没有了吧,调了这么多天,总结一下做个笔记,希望能帮到你。
其他使用方式:
使用地址中断,在地址回调函数里面判断收发,在调用对应函数的,可以同时中断收发,地址在下面,写的很详细
void HAL_I2C_AddrCallback(I2C_HandleTypeDef *hi2c, uint8_t TransferDirection, uint16_t AddrMatchCode)
{
if(TransferDirection == I2C_DIRECTION_TRANSMIT)
{
if(HAL_I2C_Slave_Seq_Receive_IT(&hi2c1, i2c.RxData, sizeof(i2c.RxData), I2C_FIRST_FRAME) != HAL_OK)
{
}
}
else if(TransferDirection == I2C_DIRECTION_RECEIVE)
{
if(HAL_I2C_Slave_Seq_Transmit_IT(&hi2c1, i2c.TxData, sizeof(i2c.TxData), I2C_LAST_FRAME)!= HAL_OK)
{
}
}
}
————————————————
版权声明:本文为优快云博主「@残梦」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.youkuaiyun.com/qq_36561846/article/details/117474070

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









