







 本文是马同学高等数学学习笔记,围绕矩阵及其计算展开。介绍了矩阵定义、分类,如行矩阵、列矩阵等;阐述高斯消元法与阶梯矩阵;详细讲解矩阵的加法、乘法、幂运算、转置等运算;还说明了矩阵乘法的线性函数性质、几何意义,以及基本矩阵和矩阵函数的性质。
本文是马同学高等数学学习笔记,围绕矩阵及其计算展开。介绍了矩阵定义、分类,如行矩阵、列矩阵等;阐述高斯消元法与阶梯矩阵;详细讲解矩阵的加法、乘法、幂运算、转置等运算;还说明了矩阵乘法的线性函数性质、几何意义,以及基本矩阵和矩阵函数的性质。
本文是马同学高等数学的学习笔记!
文章目录
第二章 矩阵及其计算
2.1 线性方程组和矩阵
2.1.1 矩阵
矩阵的定义 :
由
m
×
n
m × n
m×n个数
a
i
j
(
i
=
1
,
2
,
⋯
m
;
j
=
1
,
2
,
⋯
n
)
a_{ij}(i = 1,2,\cdots m;j = 1,2,\cdots n)
aij(i=1,2,⋯m;j=1,2,⋯n)排成的m行n列的数表称为m行n列矩阵,简称
m
×
n
m×n
m×n矩阵,记作:
A
=
(
a
11
a
12
⋯
a
1
n
a
21
a
22
⋯
a
2
n
⋯
⋯
⋯
a
m
1
a
m
2
⋯
a
m
n
)
A = \left(\begin{matrix}a_{11} & a_{12} & \cdots & a_{1n} \\ a_{21} & a_{22} & \cdots &a_{2n} \\ \cdots & \cdots & & \cdots \\ a_{m1} & a_{m2} & \cdots & a_{mn}\end{matrix}\right)
A=⎝⎜⎜⎛a11a21⋯am1a12a22⋯am2⋯⋯⋯a1na2n⋯amn⎠⎟⎟⎞
这
m
×
n
m × n
m×n个数称为矩阵
A
A
A的元素。
矩阵简写 :
数
a
i
,
j
a_{i , j}
ai,j表示矩阵
A
A
A的第
i
i
i行
j
j
j列的数,称为矩阵
A
A
A的
(
i
,
j
)
(i, j)
(i,j)元。
以数
a
i
,
j
a_{i , j}
ai,j为
(
i
,
j
)
(i , j)
(i,j)元的矩阵记作
(
a
i
j
)
(a_{ij})
(aij)。
m
×
n
m×n
m×n矩阵
A
A
A也记作
A
m
×
n
A_{m×n}
Am×n。
行矩阵与列矩阵 :
行数与列数都等于n的矩阵称为n阶矩阵或者n阶方阵。
只有一行的矩阵:
A
=
(
a
1
,
a
2
,
⋯
a
n
)
A = \left(\begin{matrix}a_1, a_2, \cdots a_n\end{matrix}\right)
A=(a1,a2,⋯an)
称为行矩阵,又称行向量。
只有一列的矩阵:
B
=
(
b
1
b
2
⋮
b
m
)
B = \left(\begin{matrix}b_1 \\ b_2 \\ \vdots \\ b_m\end{matrix}\right)
B=⎝⎜⎜⎜⎛b1b2⋮bm⎠⎟⎟⎟⎞
称为列矩阵,又称列向量。
2.2 高斯消元法与阶梯矩阵
2.2.1 单位阵
若n阶方阵从左上角到右下角的直线(对角线)以外的元素都是0,这种方阵称为对角矩阵,简称对角阵,也记作:
A
=
d
i
a
g
(
λ
1
,
λ
2
,
⋯
 
,
λ
n
)
A = diag(\lambda_1, \lambda_2, \cdots, \lambda_n)
A=diag(λ1,λ2,⋯,λn)
特别地,当均为1时,对应的方阵称为n阶单位矩阵(identity matrix)
注:若
A
B
=
B
AB = B
AB=B,则
A
A
A也不一定为单位矩阵。
如:
(
1
3
1
3
0
1
)
(
1
1
2
2
)
=
(
1
1
2
2
)
\left(\begin{matrix}\frac{1}{3} & \frac{1}{3} \\ 0 & 1\end{matrix}\right)\left(\begin{matrix}1 & 1 \\ 2 & 2\end{matrix}\right) = \left(\begin{matrix}1 & 1 \\ 2 & 2\end{matrix}\right)
(310311)(1212)=(1212)
2.2.2 初等变换与初等矩阵
Guass消元法只需要三种操作就可以实现,这三种操作对应了三种矩阵:
| 名称 | 操作 | 应用到单位阵 |
|---|---|---|
| 倍加变换 | r 1 ′ = r 1 + k r 2 r^{'}_1 =r_1 + kr_2 r1′=r1+kr2 | ( 1 k 0 0 1 0 0 0 1 ) \left(\begin{matrix}1 & k & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1\end{matrix}\right) ⎝⎛100k10001⎠⎞ |
| 倍乘变换 | r 1 ′ = k r 1 ( k ≠ 0 ) r^{'}_1 = kr_1(k \neq 0) r1′=kr1(k̸=0) | ( k 0 0 0 1 0 0 0 1 ) \left(\begin{matrix}k & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1\end{matrix}\right) ⎝⎛k00010001⎠⎞ |
| 对换变换 | r 1 ↔ r 2 r_1 \leftrightarrow r_2 r1↔r2 | ( 0 1 0 1 0 0 0 0 1 ) \left(\begin{matrix}0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1\end{matrix}\right) ⎝⎛010100001⎠⎞ |
以上三种称为初等行变换,初等行变换和初等列变换合称初等变换。
把对单位阵实施一次初等变换得到的矩阵称为:初等矩阵
2.2.3 阶梯矩阵
非零矩阵若满足:
- 非零行在零行的上面
- 某一行的先导元素所在的列位于前一行先导元素的右边
- 某一先导元素所在列的下方元素都是0
则称此矩阵为行阶梯矩阵,阶梯矩阵中的非零行的先导元素称为主元。
其中先导元素指的是非零行中最左边的非零元素。
若 A A A是行阶梯矩阵,并且还满足:
- 非零行的先导元素为1
- 先导元素所在的列的其他元素均为0
则称 A A A为行最简矩阵
2.3 矩阵运算(上)–加法和乘法
2.3.1 同型矩阵与矩阵相等
同型矩阵 : 两个矩阵的行数和列数相等。
矩阵相等 : 如果 A A A 与 B B B 是同型矩阵,且它们的对应元素相等,则矩阵 A A A和矩阵 B B B相等,记作: A = B A = B A=B。
零矩阵 : 元素都是零的矩阵称为零矩阵,记作 O O O,注意不同型的零矩阵是不同的。
2.3.2 矩阵加法与数乘
加法定义 :设有两个
m
×
n
m × n
m×n矩阵
A
=
(
a
i
j
)
A = (a_{ij})
A=(aij)和
B
=
(
b
i
j
)
B = (b_{ij})
B=(bij),那么矩阵
A
A
A和
B
B
B的和记为
A
+
B
A+B
A+B,规定为:
A
+
B
=
(
a
11
+
b
11
a
12
+
b
12
⋯
a
1
n
+
b
1
n
a
21
+
b
21
a
22
+
b
22
⋯
a
2
n
+
b
2
n
⋯
⋯
⋯
a
m
1
+
b
m
1
a
m
2
+
b
m
2
⋯
a
m
n
+
b
m
n
)
A + B = \left(\begin{matrix} a_{11}+b_{11} & a_{12} + b_{12} & \cdots& a_{1n} + b_{1n} \\ a_{21} + b_{21} & a_{22} + b_{22} & \cdots &a_{2n} + b_{2n} \\ \cdots & \cdots & & \cdots \\ a_{m1} + b_{m1} & a_{m2} + b_{m2} & \cdots & a_{mn} + b_{mn} \end{matrix}\right)
A+B=⎝⎜⎜⎛a11+b11a21+b21⋯am1+bm1a12+b12a22+b22⋯am2+bm2⋯⋯⋯a1n+b1na2n+b2n⋯amn+bmn⎠⎟⎟⎞
−
A
-A
−A称为矩阵
A
A
A的负矩阵,记作:
−
A
=
(
−
a
i
j
)
-A = (-a_{ij})
−A=(−aij)
显然有:
A
+
(
−
A
)
=
O
A + (-A) = O
A+(−A)=O
数乘定义 : 数
k
k
k与矩阵
A
A
A的乘积记作:
k
A
或
A
k
kA 或 Ak
kA或Ak
规定为:
k
A
=
A
k
=
(
k
a
11
k
a
12
⋯
k
a
1
n
k
a
21
k
a
22
⋯
k
a
2
n
⋯
⋯
⋯
k
a
m
1
k
a
m
2
⋯
k
a
m
n
)
kA = Ak = \left(\begin{matrix} ka_{11} & ka_{12} & \cdots& ka_{1n} \\ ka_{21} & ka_{22} & \cdots &ka_{2n} \\ \cdots & \cdots & & \cdots \\ ka_{m1} & ka_{m2} & \cdots & ka_{mn} \end{matrix}\right)
kA=Ak=⎝⎜⎜⎛ka11ka21⋯kam1ka12ka22⋯kam2⋯⋯⋯ka1nka2n⋯kamn⎠⎟⎟⎞
2.3.3 矩阵乘法的合法性
- m × n m × n m×n的矩阵只能和 n × p n × p n×p矩阵相乘
- 相乘后的矩阵大小为 m × p m × p m×p
2.3.4 行观点、列观点与点积观点
行观点 :
假设:
x
=
(
x
1
,
x
2
,
⋯
 
,
x
m
)
,
A
=
(
a
11
a
12
⋯
a
1
n
a
21
a
22
⋯
a
2
n
⋯
⋯
⋯
a
m
1
a
m
2
⋯
a
m
n
)
x = (x_1, x_2, \cdots, x_m), A = \left(\begin{matrix} a_{11} & a_{12} & \cdots& a_{1n} \\ a_{21} & a_{22} & \cdots &a_{2n} \\ \cdots & \cdots & & \cdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} \end{matrix}\right)
x=(x1,x2,⋯,xm),A=⎝⎜⎜⎛a11a21⋯am1a12a22⋯am2⋯⋯⋯a1na2n⋯amn⎠⎟⎟⎞
计算
x
A
xA
xA,将结果看成行向量的线性组合:
x
A
=
(
x
1
,
x
2
,
⋯
 
,
x
m
)
(
a
11
a
12
⋯
a
1
n
a
21
a
22
⋯
a
2
n
⋯
⋯
⋯
a
m
1
a
m
2
⋯
a
m
n
)
=
x
1
(
a
11
,
a
12
,
⋯
 
,
a
1
n
)
+
⋯
+
x
m
(
a
m
1
,
⋯
 
,
a
m
n
)
xA = (x_1, x_2, \cdots, x_m)\left(\begin{matrix} a_{11} & a_{12} & \cdots& a_{1n} \\ a_{21} & a_{22} & \cdots &a_{2n} \\ \cdots & \cdots & & \cdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} \end{matrix}\right) = x_1(a_{11}, a_{12}, \cdots, a_{1n}) + \cdots + x_m(a_{m1}, \cdots,a_{mn})
xA=(x1,x2,⋯,xm)⎝⎜⎜⎛a11a21⋯am1a12a22⋯am2⋯⋯⋯a1na2n⋯amn⎠⎟⎟⎞=x1(a11,a12,⋯,a1n)+⋯+xm(am1,⋯,amn)
此时
A
A
A在行向量
x
x
x的右边,可以说
A
A
A右乘x。
列观点 :
假设:
x
=
(
x
1
x
2
⋮
x
n
)
,
A
=
(
a
11
a
12
⋯
a
1
n
a
21
a
22
⋯
a
2
n
⋯
⋯
⋯
a
m
1
a
m
2
⋯
a
m
n
)
x = \left(\begin{matrix}x_1 \\ x_2\\ \vdots \\ x_n\end{matrix}\right), A = \left(\begin{matrix} a_{11} & a_{12} & \cdots& a_{1n} \\ a_{21} & a_{22} & \cdots &a_{2n} \\ \cdots & \cdots & & \cdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} \end{matrix}\right)
x=⎝⎜⎜⎜⎛x1x2⋮xn⎠⎟⎟⎟⎞,A=⎝⎜⎜⎛a11a21⋯am1a12a22⋯am2⋯⋯⋯a1na2n⋯amn⎠⎟⎟⎞
计算
A
x
Ax
Ax,将结果看成列向量的线性组合:
A
x
=
(
a
11
a
12
⋯
a
1
n
a
21
a
22
⋯
a
2
n
⋯
⋯
⋯
a
m
1
a
m
2
⋯
a
m
n
)
(
x
1
x
2
⋮
x
n
)
=
x
1
(
a
11
a
21
⋮
a
m
1
)
+
x
2
(
a
12
a
22
⋮
a
m
2
)
+
⋯
+
x
n
(
a
1
n
a
2
n
⋮
a
m
n
)
Ax = \left(\begin{matrix} a_{11} & a_{12} & \cdots& a_{1n} \\ a_{21} & a_{22} & \cdots &a_{2n} \\ \cdots & \cdots & & \cdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} \end{matrix}\right)\left(\begin{matrix}x_1 \\ x_2\\ \vdots \\ x_n\end{matrix}\right) = x_1\left(\begin{matrix}a_{11} \\ a_{21}\\ \vdots \\ a_{m1}\end{matrix}\right) + x_2\left(\begin{matrix}a_{12} \\ a_{22}\\ \vdots \\ a_{m2}\end{matrix}\right) + \cdots + x_n\left(\begin{matrix}a_{1n} \\ a_{2n}\\ \vdots \\ a_{mn}\end{matrix}\right)
Ax=⎝⎜⎜⎛a11a21⋯am1a12a22⋯am2⋯⋯⋯a1na2n⋯amn⎠⎟⎟⎞⎝⎜⎜⎜⎛x1x2⋮xn⎠⎟⎟⎟⎞=x1⎝⎜⎜⎜⎛a11a21⋮am1⎠⎟⎟⎟⎞+x2⎝⎜⎜⎜⎛a12a22⋮am2⎠⎟⎟⎟⎞+⋯+xn⎝⎜⎜⎜⎛a1na2n⋮amn⎠⎟⎟⎟⎞
此时,A在列向量
x
x
x的左边,可以说
A
A
A左乘
x
x
x。
点积观点 :
设
A
=
(
a
i
j
)
A = (a_{ij})
A=(aij)是
m
×
s
m × s
m×s矩阵,
B
=
(
b
i
j
)
B = (b_{ij})
B=(bij)是一个
s
×
n
s×n
s×n矩阵,那么规定矩阵
A
A
A与
B
B
B的乘积是一个
m
×
n
m×n
m×n的矩阵
C
=
(
c
i
j
)
C = (c_{ij})
C=(cij),其中:
c
i
j
=
∑
k
=
1
s
a
i
k
b
k
j
c_{ij} = \sum\limits_{k = 1}^s a_{ik}b_{kj}
cij=k=1∑saikbkj,记作:
C
=
A
B
C = AB
C=AB
2.4 矩阵运算(下)–幂运算与转置
2.4.1 矩阵的幂
设
A
A
A是n阶方阵,定义:
A
1
=
A
,
A
2
=
A
1
A
1
,
⋯
 
,
A
k
+
1
=
A
k
A
1
A^1 = A, A^2 = A^1A^1, \cdots, A^{k+1} = A^{k}A^1
A1=A,A2=A1A1,⋯,Ak+1=AkA1
其中
k
k
k为正整数,也就是说,
A
k
A^k
Ak就是
k
k
k个
A
A
A连乘。只有方阵的幂才有意义。
2.4.2 矩阵的转置
将矩阵
A
A
A的行换成同序数的列得到一个新矩阵,叫做
A
A
A的转置矩阵,记作:
A
T
A^T
AT
则行向量和列向量互为转置矩阵。
而向量默认为列向量,则行向量用列向量的转置来表达。
x
=
(
a
1
a
2
⋮
a
n
)
,
x
T
=
(
a
1
,
a
2
,
⋯
 
,
a
n
)
x = \left(\begin{matrix}a_1 \\ a_2 \\ \vdots \\ a_n\end{matrix}\right), \qquad x^T = (a_1, a_2, \cdots, a_n)
x=⎝⎜⎜⎜⎛a1a2⋮an⎠⎟⎟⎟⎞,xT=(a1,a2,⋯,an)
2.4.3 转置矩阵的性质
(
A
B
)
T
=
B
T
A
T
(AB)^T = B^TA^T
(AB)T=BTAT
特殊的转置矩阵:
若:
A
T
=
A
A^T = A
AT=A则矩阵
A
A
A称为对称矩阵。
若:
A
T
=
−
A
A^T = -A
AT=−A则矩阵
A
A
A称为反对称矩阵。
2.5 矩阵乘法是线性函数
2.5.1 线性函数的定义
满足以下条件的函数是线性函数:
- 齐次性: L ( m x ) = m L ( x ) L(mx) = mL(x) L(mx)=mL(x)
- 可加性: L ( x + y ) = L ( x ) + L ( y ) L(x + y) = L(x) + L(y) L(x+y)=L(x)+L(y)
齐次性 : 输入是m倍、输出也是m倍。
2.5.2 矩阵函数是线性函数
A
(
m
x
)
=
m
(
A
x
)
A(mx) = m(Ax)
A(mx)=m(Ax)
A
(
x
+
y
)
=
A
(
x
)
+
A
(
y
)
A(x + y) = A(x) + A(y)
A(x+y)=A(x)+A(y)
2.5.3 一点补充
对一般函数
f
(
x
)
f(x)
f(x)而言,存在
f
(
x
)
=
b
f(x) = b
f(x)=b只有一个解,而
f
(
x
)
=
c
f(x) = c
f(x)=c有多个解的情况。
如:
f
(
x
)
=
x
2
f(x) = x^2
f(x)=x2
- x 2 = 0 x^2 = 0 x2=0有一个解
-
x
2
=
4
x^2 = 4
x2=4有两个解
然而线性函数不存在这样的情况。
命题 :
设
A
x
Ax
Ax是线性函数,且
A
x
=
b
Ax = b
Ax=b有多个不同解,则若
A
x
=
c
Ax = c
Ax=c有解,一定也是多个不同解。
proof:
设
x
1
x_1
x1是
A
x
=
c
Ax = c
Ax=c的一个解。
x
2
、
x
3
x_2、x_3
x2、x3是
A
x
=
b
Ax = b
Ax=b的两个不同解。
由线性函数的可加性:
A
(
x
1
+
(
x
2
−
x
3
)
)
=
A
x
1
+
A
x
2
−
A
x
3
=
c
+
b
−
b
=
c
A(x_1+(x_2 - x_3)) = Ax_1 + Ax_2- Ax_3 = c + b - b = c
A(x1+(x2−x3))=Ax1+Ax2−Ax3=c+b−b=c
说明
x
1
+
x
2
−
x
3
x_1 + x_2 - x_3
x1+x2−x3也是
A
x
=
c
Ax = c
Ax=c的解。
即
A
x
=
c
Ax = c
Ax=c也有多个不同解。
2.6 矩阵乘法的几何意义
2.6.1 坐标
给向量空间加上坐标系——自然基。(一般情况下,向量空间默认选择自然基作为基)
i = ( 1 0 ) , j = ( 0 1 ) i = \left(\begin{matrix}1 \\ 0\end{matrix}\right) , \qquad j = \left(\begin{matrix}0 \\ 1\end{matrix}\right) i=(10),j=(01)
令:
A
=
(
1
−
1
1
1
)
A = \left(\begin{matrix}1 & -1 \\ 1 & 1\end{matrix}\right)
A=(11−11)
再选取:
a
=
(
1
1
)
=
1
i
+
1
j
a = \left(\begin{matrix}1 \\ 1\end{matrix}\right) = 1i + 1j
a=(11)=1i+1j
根据矩阵乘法的规则,
A
a
=
b
Aa = b
Aa=b计算如下:
A
a
=
(
1
−
1
1
1
)
(
1
1
)
=
1
(
1
1
)
+
1
(
−
1
1
)
=
(
0
2
)
=
b
Aa = \left(\begin{matrix}1 & -1 \\ 1 & 1\end{matrix}\right)\left(\begin{matrix}1 \\ 1\end{matrix}\right) = 1\left(\begin{matrix}1 \\ 1\end{matrix}\right) + 1\left(\begin{matrix}-1 \\ 1\end{matrix}\right)= \left(\begin{matrix}0 \\ 2\end{matrix}\right) = b
Aa=(11−11)(11)=1(11)+1(−11)=(02)=b
这个过程可以看作矩阵列向量的线性组合。
令:
c
1
=
(
1
1
)
,
c
2
=
(
−
1
1
)
c_1 = \left(\begin{matrix}1 \\ 1\end{matrix}\right), \qquad c_2 = \left(\begin{matrix}-1 \\ 1\end{matrix}\right)
c1=(11),c2=(−11)
则:
a
=
1
i
+
1
j
⟶
A
b
=
1
c
1
+
1
c
2
a = 1i + 1j \stackrel{A}\longrightarrow b = 1c_1 + 1c_2
a=1i+1j⟶Ab=1c1+1c2
也就是保持系数不变,但是自然基被矩阵的列向量给替换了。
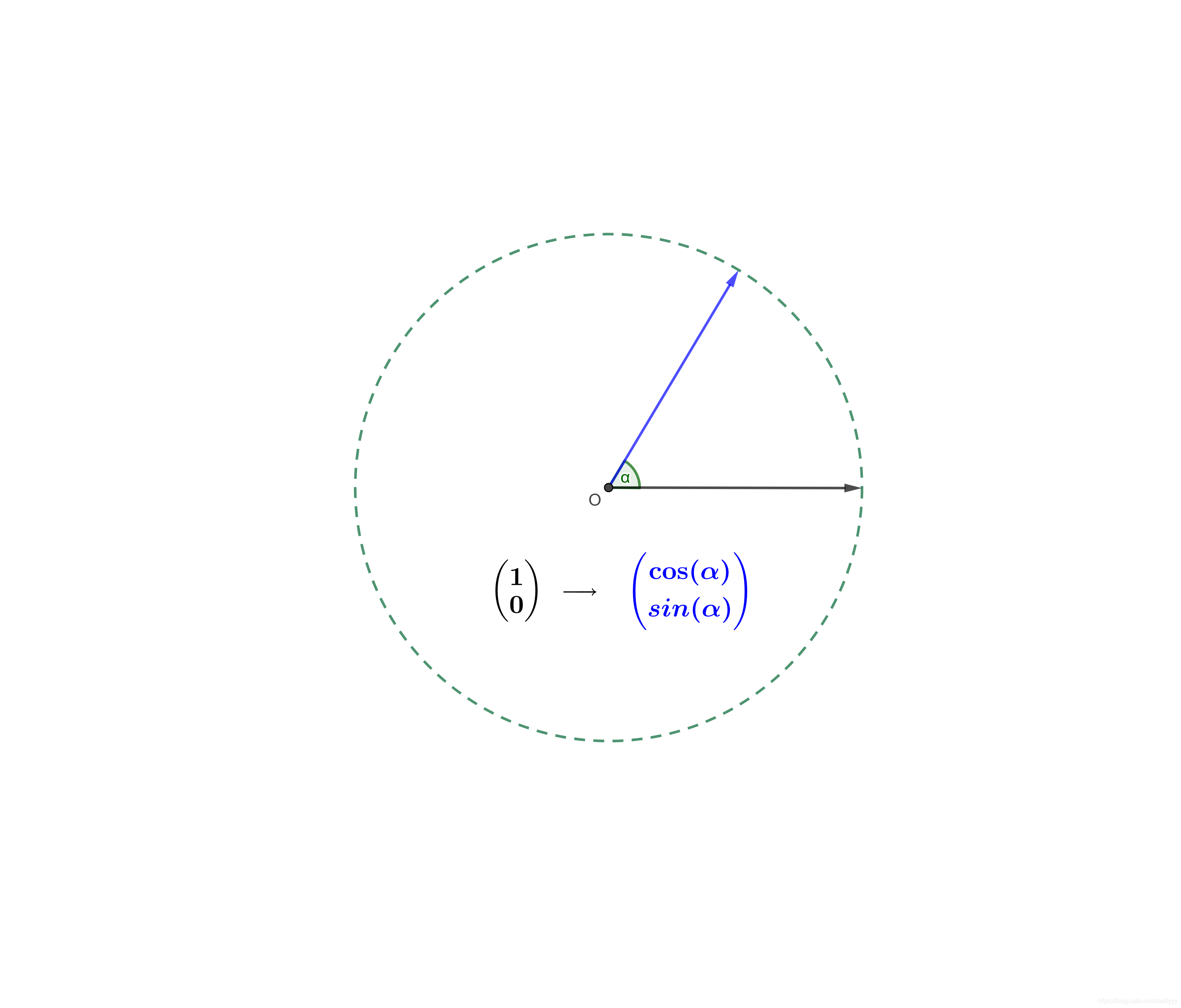
2.6.2 旋转矩阵
单位圆中,与
x
x
x轴夹角为
α
\alpha
α的向量表示如下:
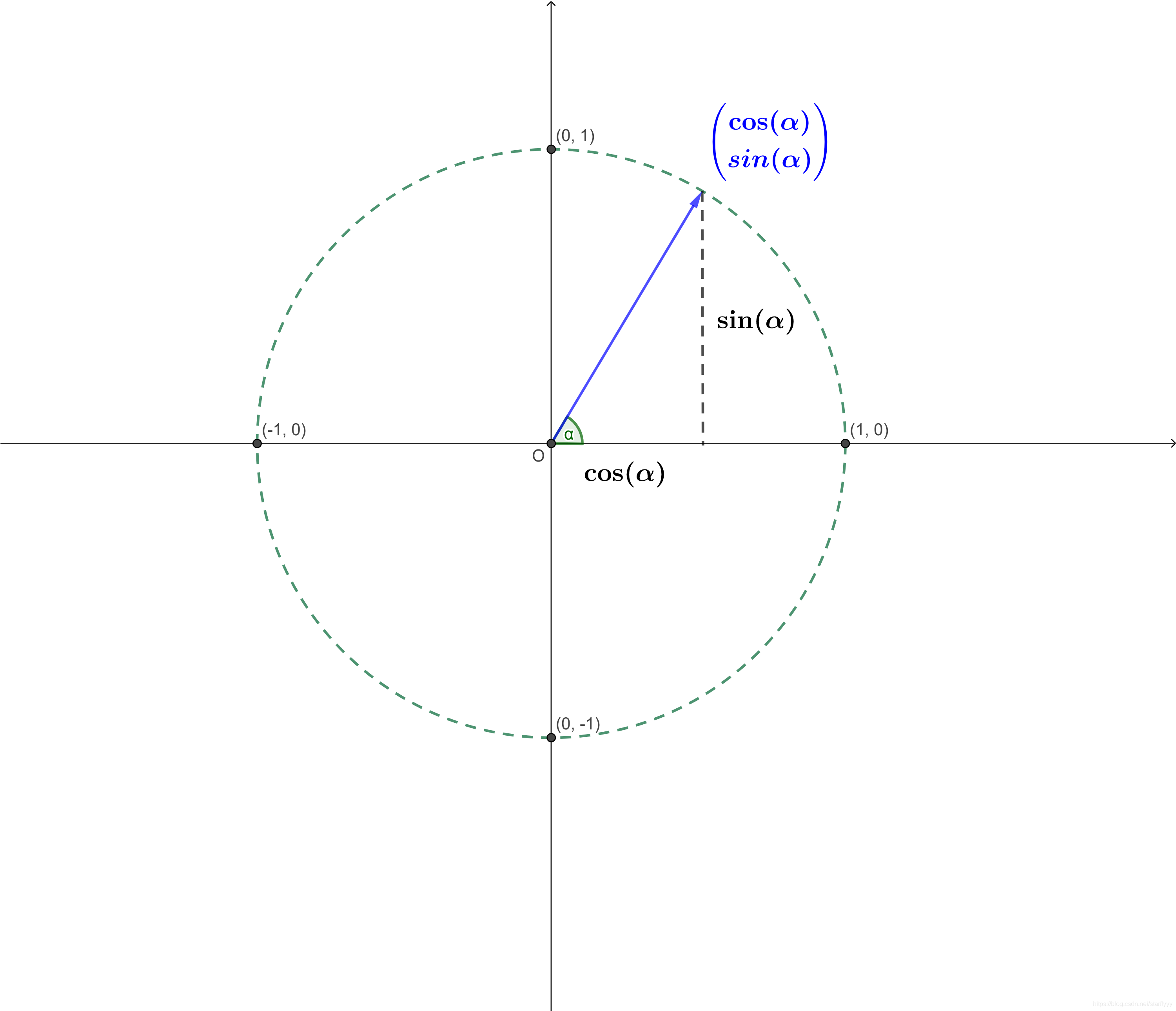
则:
与
y
y
y轴夹角为
α
\alpha
α的向量表示如下:
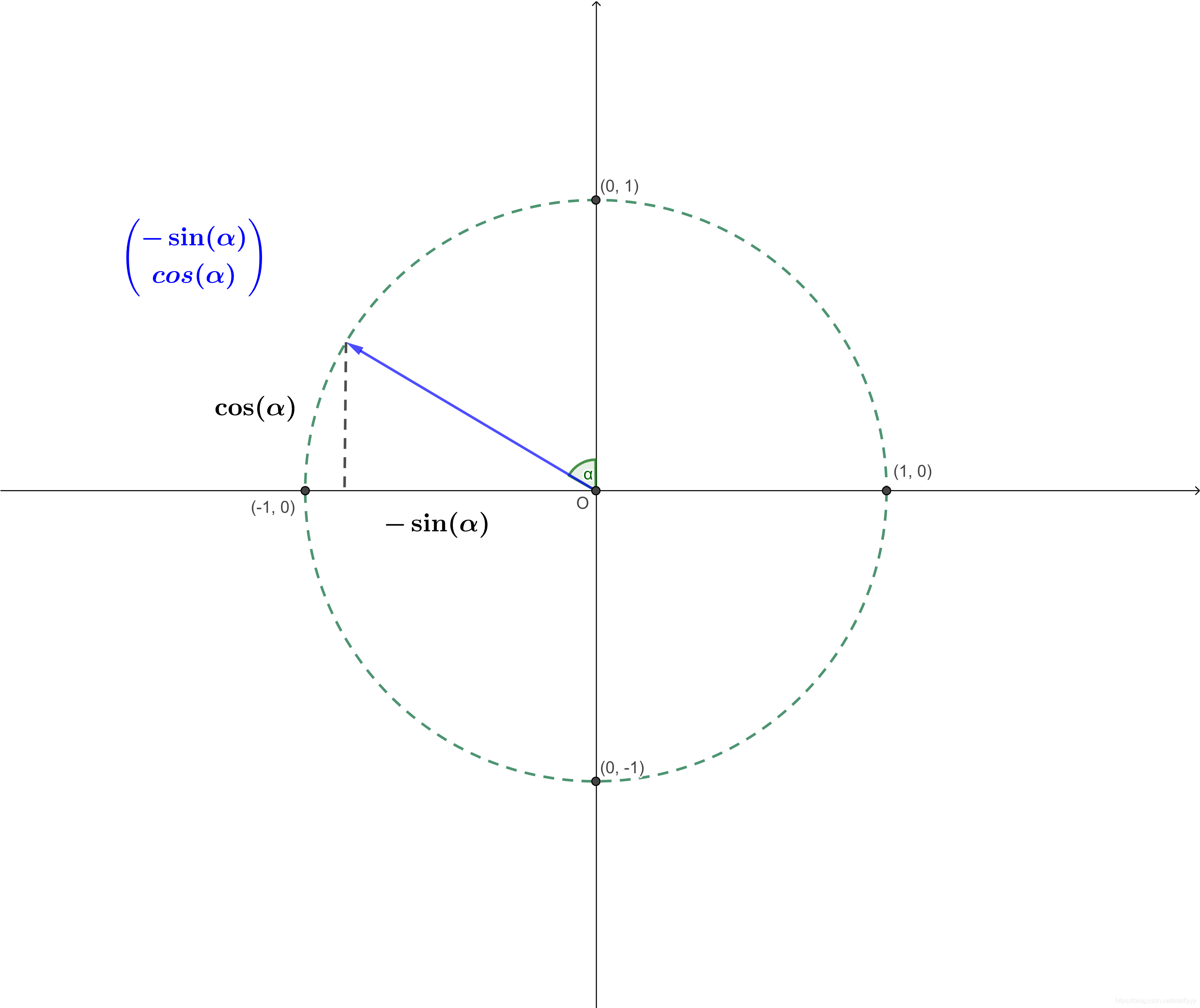
则:
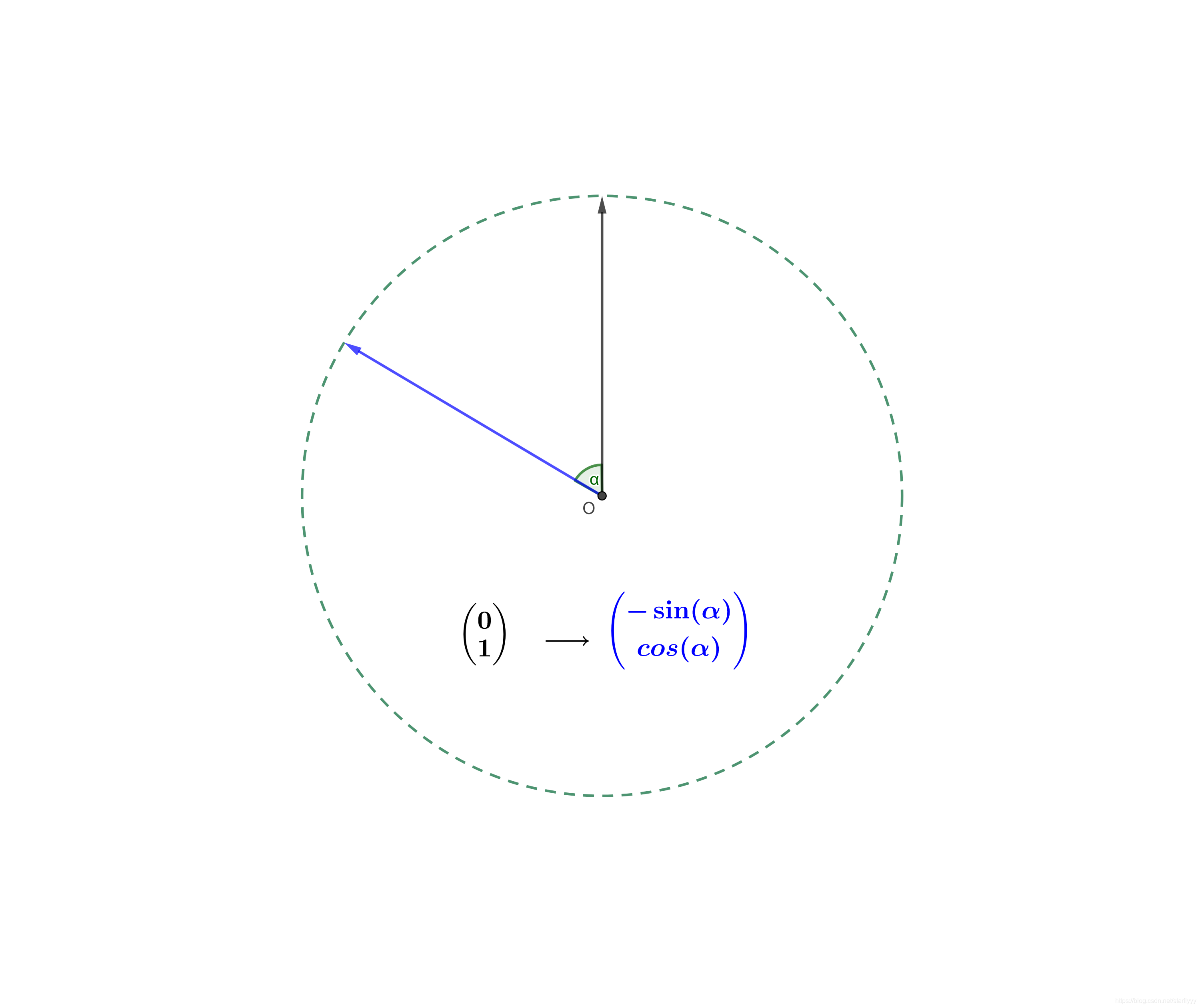
x
1
i
+
x
2
j
⟶
A
=
(
cos
α
−
sin
α
sin
α
cos
α
)
x
1
(
cos
α
sin
α
)
+
x
2
(
−
sin
α
cos
α
)
x_1 i + x_2 j \stackrel{A = \left(\begin{matrix}\cos\alpha & - \sin\alpha \\ \sin\alpha & \cos \alpha\end{matrix}\right)}\longrightarrow x_1 \left(\begin{matrix} \cos\alpha \\ \sin\alpha \end{matrix}\right) + x_2 \left(\begin{matrix}-\sin\alpha \\ \cos\alpha\end{matrix}\right)
x1i+x2j⟶A=(cosαsinα−sinαcosα)x1(cosαsinα)+x2(−sinαcosα)
旋转矩阵的原理,就是通过旋转基来实现的。
2.7 基本矩阵及矩阵函数的性质
2.7.1 向量函数的图像
矩阵函数是一个向量函数,它的作用需要比较两个向量空间中的点的变化而得出:
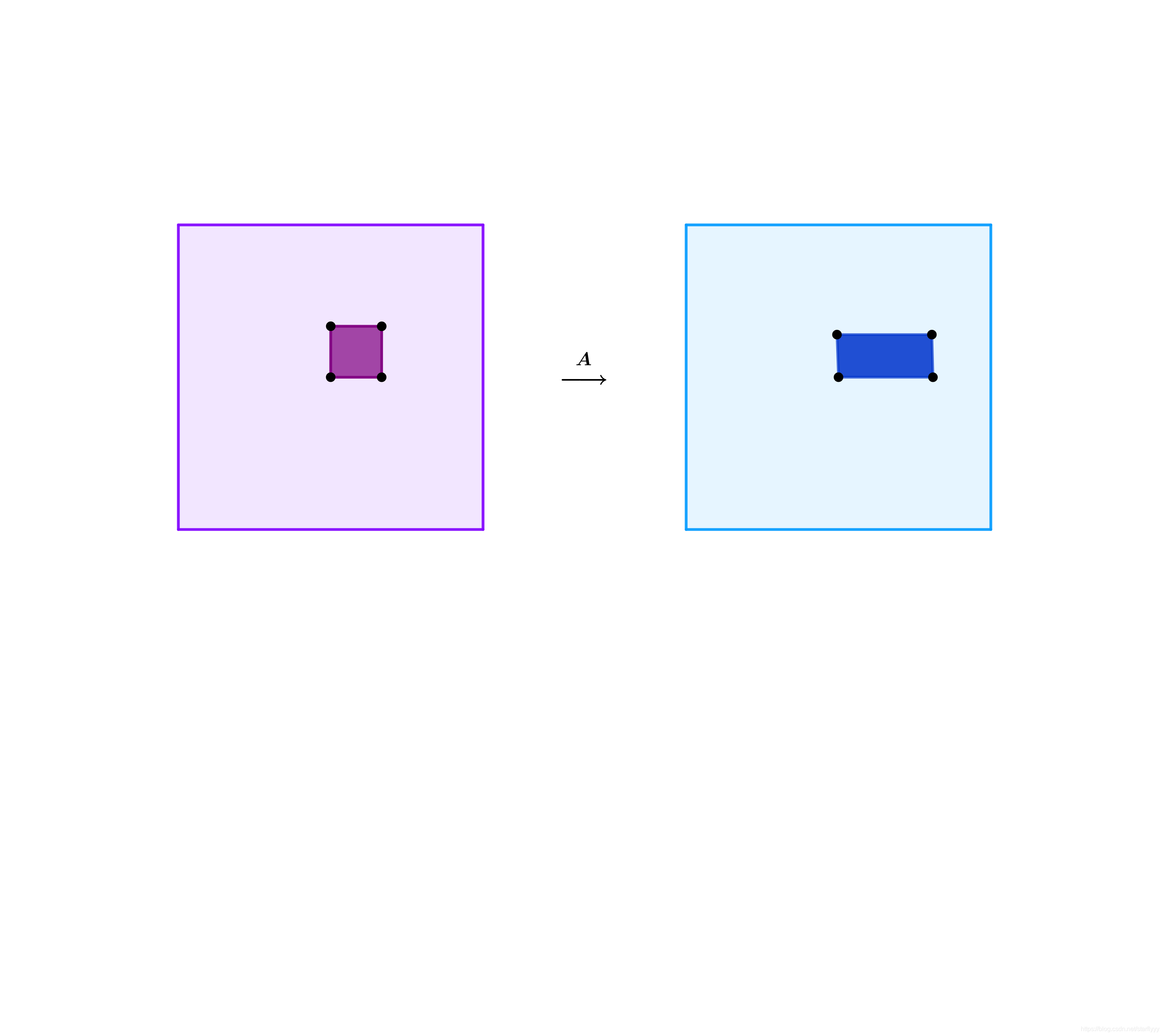
将向量用点来表示,再将各个点连接起来,构成几何图形。如此就可以看出矩形函数的特征。
2.7.2 基本函数图像
R 2 → R 2 R^2 \rightarrow R^2 R2→R2基本矩阵
-
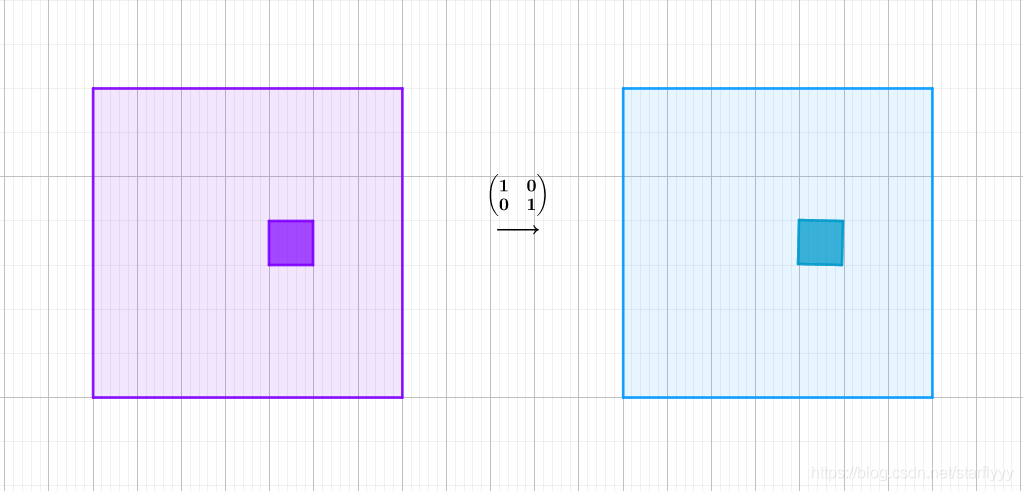
单位矩阵
什么都不改变的矩阵称作单位矩阵:
-
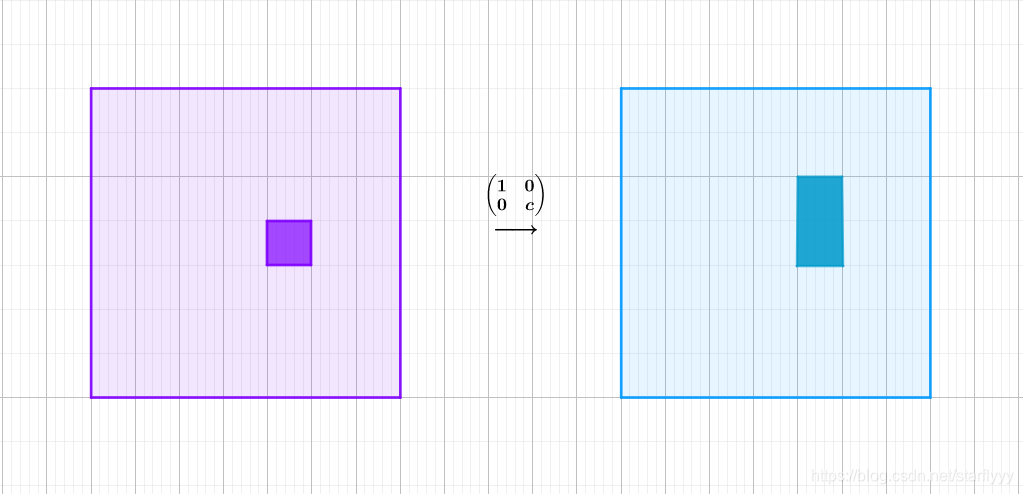
伸缩矩阵
在某个基(或每个基)方向上进行了缩放。
选取 i , j i, j i,j为基,下图是在 j j j方向上伸长了c倍:
-
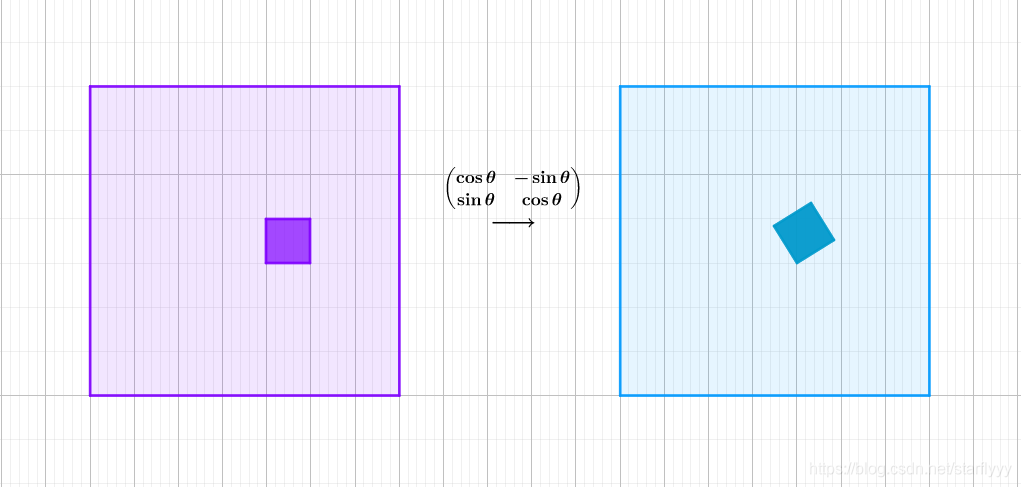
旋转矩阵
围绕原点,几何图形进行了旋转。下图是沿逆时针旋转了 θ \theta θ角:
-
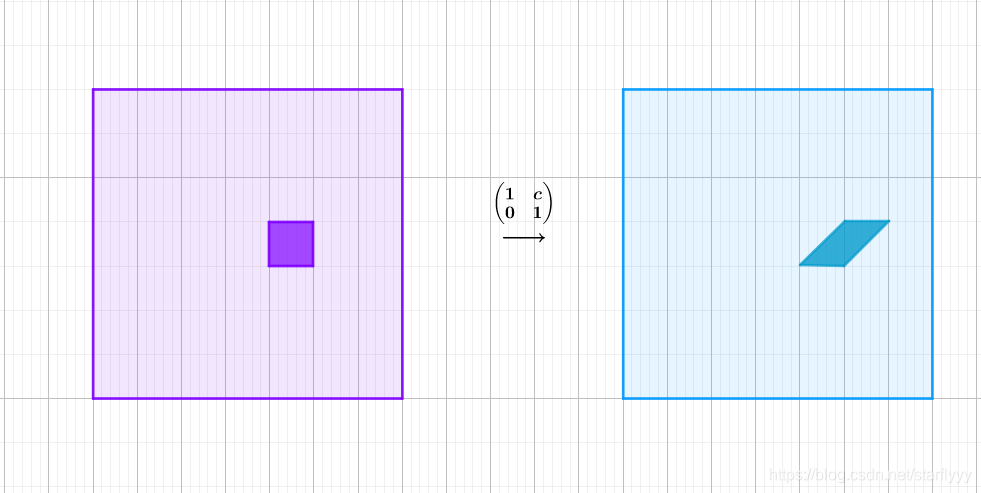
剪切矩阵
是通过在某个基上平移 c c c,将正方形变换成一般的平行四边形。
选取 i , j i,j i,j为基,下图是在i方向平移了 c c c:
-
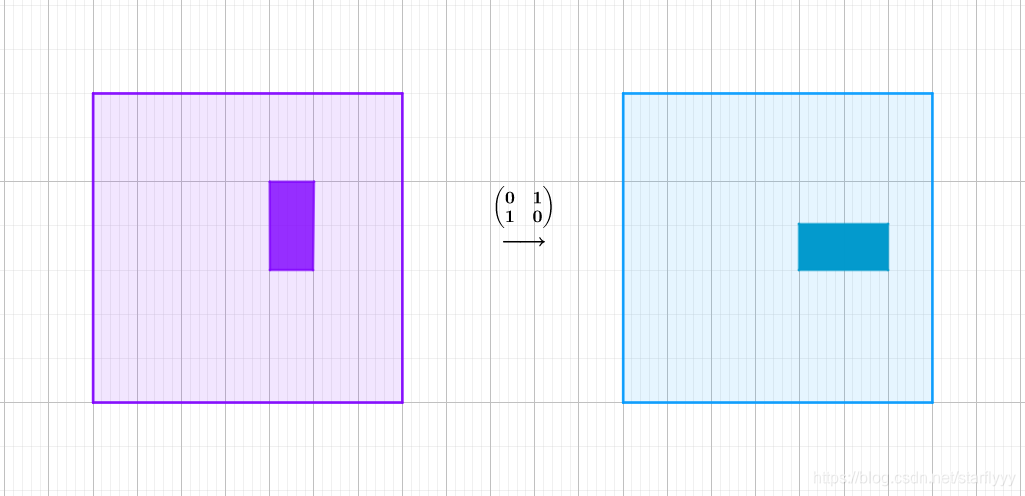
镜像矩阵
将平面上任一点 ( x , y ) (x, y) (x,y)变换成 ( y , x ) (y, x) (y,x),可以理解为以 y = x y = x y=x为对称轴的"镜射":
2.7.3 交换律、结合律和分配律
矩阵乘法作为线性函数,首先不满足交换律。
从复合函数的角度来看,复合的主次很重要。
对于矩阵乘法而言:
- 一般来说: A B ≠ B A AB \neq BA AB̸=BA
- B A = O BA = O BA=O不一定有 B = O B = O B=O或 A = O A = O A=O
复合函数中,在主次不变的前提下,复合的顺序不重要,矩阵的乘法满足结合律。
(
A
B
)
C
=
A
(
B
C
)
(AB)C = A(BC)
(AB)C=A(BC)
分配律即可加性:
A
(
B
+
C
)
=
A
B
+
A
C
A(B+C) = AB + AC
A(B+C)=AB+AC

















 1224
1224

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









