




引言:为什么选择标准库开发?
在嵌入式开发领域,曾经有位开发者分享过这样的经历:"我花了三天时间调试一段LED闪烁代码,最后发现只是把0x40010C08写成了0x40010C0C。"这个真实案例生动地揭示了寄存器级开发的痛点——复杂的地址记忆和极易出错的特性。
2007年,ST公司推出的**STM32标准外设库(SPL)**彻底改变了这一局面。这个仅2MB的代码包,通过巧妙的封装将底层寄存器操作转化为直观的函数调用,让开发者能够用"人类可读的语言"与硬件对话。
一、开发方式对比:寄存器 vs 标准库
核心差异分析
| 对比维度 | 寄存器开发 | 标准库开发 |
|---|---|---|
| 代码效率 | 直接操作硬件,无额外开销 | 轻微封装开销,实际可忽略 |
| 开发速度 | 需熟记大量寄存器地址 | 直观函数调用,快速上手 |
| 代码可读性 | 十六进制数值,难以理解 | 语义化命名,逻辑清晰 |
| 维护成本 | 修改牵一发而动全身 | 模块化设计,易于迭代 |
| 学习曲线 | 深入理解硬件原理 | 快速实现功能需求 |
| 调试难度 | 错误隐蔽,难以定位 | 错误信息明确,易于排查 |
决策建议:初学者和大多数应用项目推荐使用标准库,追求极致性能或学习硬件原理时考虑寄存器开发。
二、GPIO深度解析:8种工作模式全掌握
GPIO模式全景概览
2.1 输出模式家族
推挽输出模式 - 最常用的输出模式
电路结构原理:
推挽输出内部结构
VDD(3.3V)
│
┌───P-MOS───┐
│ │
控制逻辑 ──┤ ├── GPIO引脚
│ │
└───N-MOS───┘
│
GND
工作特性:
- 高电平输出:P-MOS导通,N-MOS截止,输出3.3V
- 低电平输出:P-MOS截止,N-MOS导通,输出0V
- 驱动能力:强(20-25mA),可直接驱动负载
- 输出阻抗:低(10-50Ω)
经典应用场景:
- LED控制
- 继电器驱动
- 蜂鸣器控制
- 普通数字信号输出
开漏输出模式 - 总线通信专用
电路结构原理:
开漏输出内部结构
VDD_EXT(可不同电压)
│
外部上拉电阻
│
控制逻辑 ──┼── N-MOS ─── GPIO引脚
│
GND
核心特性:
- 电平转换:支持不同电压域设备通信
- 线与逻辑:多设备共享总线不冲突
- 必须条件:外部上拉电阻(通常4.7kΩ)
应用场景:
- I2C总线通信
- 1-Wire单总线
- 电平转换电路
- 不适用于直接驱动负载
2.2 输入模式家族
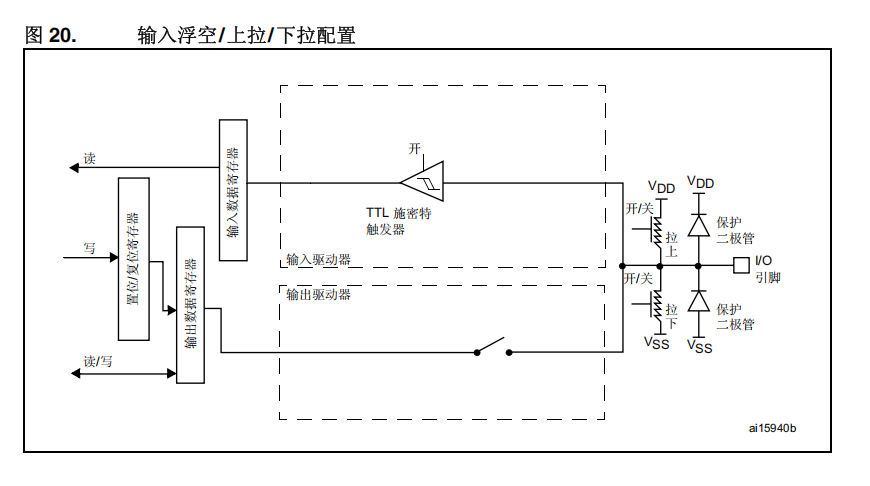
对 I/O 端口进行编程作为输入时:
● 输出缓冲器被关闭
● 施密特触发器输入被打开
● 根据 GPIOx_PUPDR 寄存器中的值决定是否打开上拉和下拉电阻
● 输入数据寄存器每隔 1 个 AHB1 时钟周期对 I/O 引脚上的数据进行一次采样
● 对输入数据寄存器的读访问可获取 I/O 状态
上拉输入模式 - 按键检测首选
电路模型:
上拉输入模型
VDD
│
内部上拉电阻(30kΩ)
│
GPIO引脚 ←─┼─ 外部信号
│
GND
电平逻辑:
- 引脚悬空:高电平(1)
- 外部拉低:低电平(0)
- 适合按键到GND的设计
下拉输入模式 - 特定场景选择
适用场景:
- 按键连接到VCC的设计
- 特定传感器接口
- 共VCC的信号检测
📡 浮空输入模式 - 高速信号专用
重要提醒:
浮空输入必须外部确定电平!
外部信号源
│
确定电平电路
│
GPIO引脚(浮空输入)
│
GND
应用场景:
- 外部中断输入
- USART_RX接收
- 高速数字信号
- 禁止引脚悬空
2.3 特殊功能模式
🎛️ 模拟输入模式 - ADC采样专用
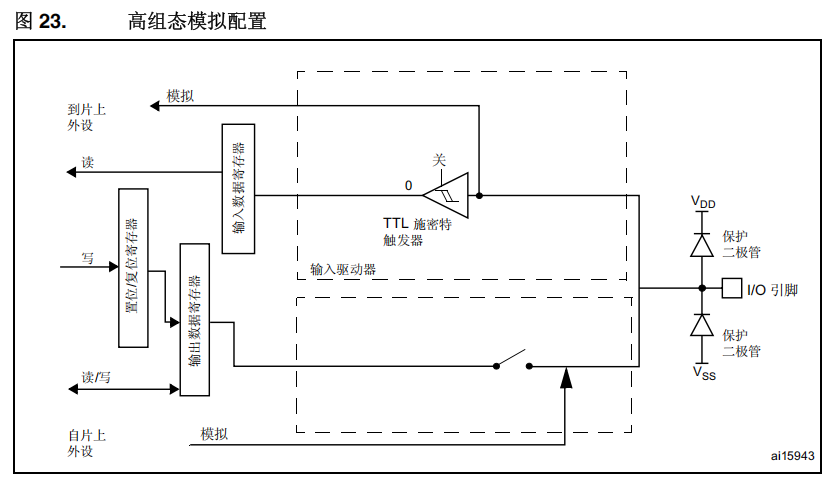
对 I/O 端口进行编程作为模拟配置时:
● 输出缓冲器被禁止。
● 施密特触发器输入停用,I/O 引脚的每个模拟输入的功耗变为零。施密特触发器的输出被
强制处理为恒定值 (0)。
● 弱上拉和下拉电阻被关闭。
● 对输入数据寄存器的读访问值为“0”。
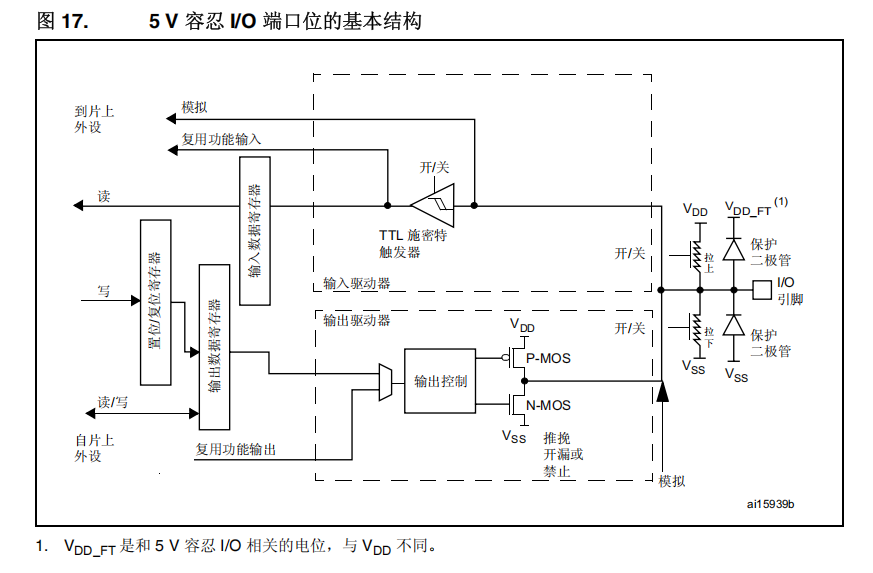
注意: 在模拟配置中,I/O 引脚不能为 5 V 容忍。
信号路径:
模拟信号 → GPIO引脚 → 采样保持 → ADC转换 → 数字值
连续信号 直连ADC 电压保持 12位精度 处理器读取
关键特性:
- 绕过所有数字电路
- 无数字噪声干扰
- 仅特定引脚支持
复用功能模式 - 外设连接桥梁
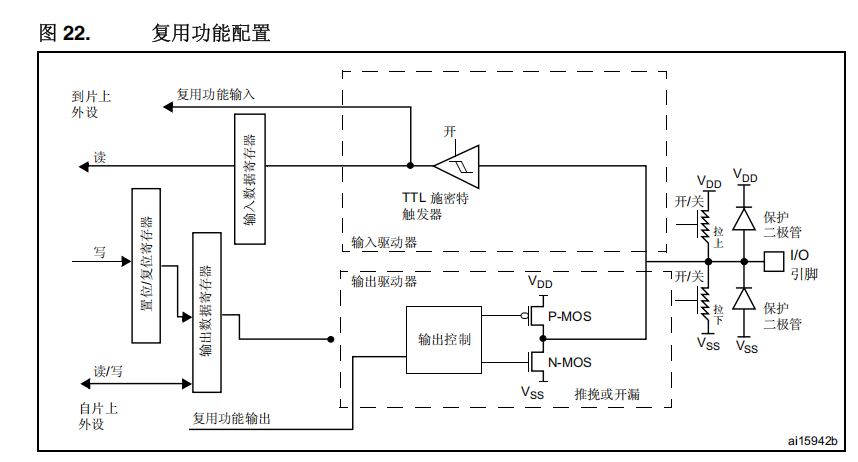
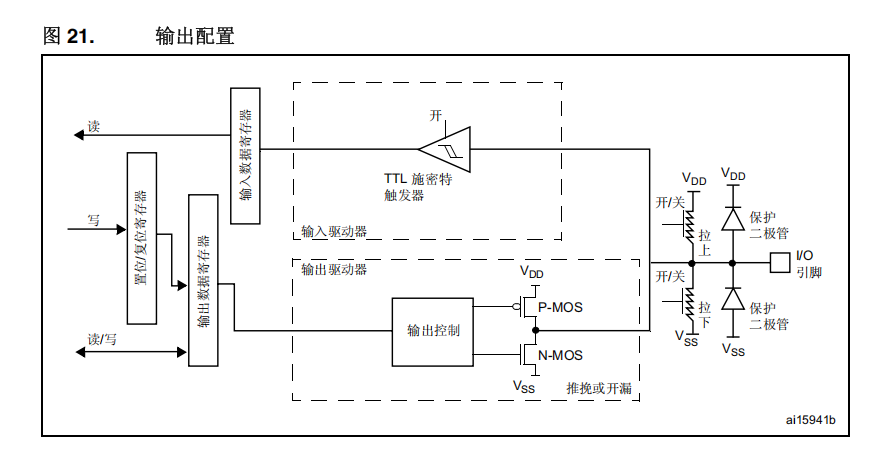
对 I/O 端口进行编程作为复用功能时:
● 可将输出缓冲器配置为开漏或推挽
● 输出缓冲器由来自外设的信号驱动(发送器使能和数据)
● 施密特触发器输入被打开
● 根据 GPIOx_PUPDR 寄存器中的值决定是否打开弱上拉电阻和下拉电阻
● 输入数据寄存器每隔 1 个 AHB1 时钟周期对 I/O 引脚上的数据进行一次采样
● 对输入数据寄存器的读访问可获取 I/O 状态
控制路径:
外设控制器 → 推挽/开漏电路 → GPIO引脚
(USART/SPI) (硬件控制) (物理连接)
应用分类:
- 复用推挽:USART_TX、SPI_MOSI、PWM输出
- 复用开漏:I2C_SDA、I2C_SCL
三、实战演练:点亮LED完整流程
3.1 硬件连接设计
LED控制电路原理:
STM32芯片
│
PF9引脚(你的对应引脚) → 220Ω限流电阻 → LED阳极 → LED阴极 → GND
│
输出低电平(0V)时LED点亮
输出高电平(3.3V)时LED熄灭
设计要点:
- 限流电阻保护LED和GPIO引脚
- 低电平点亮(共阳极设计更常见)
- 确保总电流在芯片驱动能力内
3.2 标准库开发四步法
第一步:时钟使能 - STM32的电源开关
// 使能GPIOF端口时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
关键理解:STM32为降低功耗,默认关闭所有外设时钟,使用前必须手动开启。
第二步:结构体配置 - 参数集中管理
GPIO_InitTypeDef GPIO_InitStruct;
// 配置GPIO参数
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9; // 选择PF9引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; // 输出模式
GPIO_InitStruct.GPIO_Speed = GPIO_High_Speed; // 输出速度:50MHz
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; // 推挽输出
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; // 无上下拉
这里建议都初始化,不然后面可能会出现问题
第三步:初始化应用 - 配置生效
// 将配置应用到GPIOF端口
GPIO_Init(GPIOF, &GPIO_InitStruct);
第四步:电平控制 - 最终操作
// 点亮LED(输出低电平)
GPIO_ResetBits(GPIOF, GPIO_Pin_9);
// 熄灭LED(输出高电平)
GPIO_SetBits(GPIOF, GPIO_Pin_9);
// LED状态翻转
GPIO_ToggleBits(GPIOF, GPIO_Pin_9);
3.3 完整代码示例
#include "stm32f4xx.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
// 1. 使能GPIOF时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
// 2. 配置GPIO参数
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
// 3. 初始化GPIO
GPIO_Init(GPIOF, &GPIO_InitStruct);
// 4. 初始状态:LED熄灭
GPIO_SetBits(GPIOF, GPIO_Pin_9);
}
int main(void)
{
// 初始化LED
LED_Init();
// 主循环
while(1)
{
// LED闪烁
GPIO_ToggleBits(GPIOF, GPIO_Pin_9);
// 简单延时
for(int i = 0; i < 1000000; i++);
}
}
四、标准库深度使用指南
4.1 源码结构解析
STM32标准库文件结构
├── Libraries/
│ ├── CMSIS/ # 内核相关
│ └── STM32F4xx_StdPeriph_Driver/ # 外设驱动
│ ├── inc/ # 头文件
│ │ ├── stm32f4xx_gpio.h
│ │ ├── stm32f4xx_rcc.h
│ │ └── ...
│ └── src/ # 源文件
│ ├── stm32f4xx_gpio.c
│ ├── stm32f4xx_rcc.c
│ └── ...
└── Project/
└── main.c
4.2 函数命名规律
标准库采用语义化命名规范:
外设_功能_操作
│ │ │
│ │ └── 操作类型(Cmd, Init, SetBits...)
│ └─── 具体功能(AHB1PeriphClock, PinAFConfig...)
└─── 外设名称(RCC, GPIO, USART...)
示例:
RCC_AHB1PeriphClockCmd:RCC外设的AHB1总线外设时钟命令GPIO_ReadInputDataBit:GPIO读取输入数据位
4.3 结构体成员详解
GPIO_InitTypeDef成员选项:
| 成员 | 常用选项 | 说明 |
|---|---|---|
GPIO_Mode | GPIO_Mode_IN, GPIO_Mode_OUT, GPIO_Mode_AF, GPIO_Mode_AN | 工作模式 |
GPIO_OType | GPIO_OType_PP, GPIO_OType_OD | 输出类型 |
GPIO_Speed | GPIO_Low_Speed, GPIO_Medium_Speed, GPIO_High_Speed | 输出速度 |
GPIO_PuPd | GPIO_PuPd_NOPULL, GPIO_PuPd_UP, GPIO_PuPd_DOWN | 上下拉配置 |
五、GPIO模式速查与最佳实践
5.1 模式选择决策树
开始GPIO配置
↓
是输出信号吗?
├── 是 → 需要驱动负载吗?
│ ├── 是 → 推挽输出
│ └── 否 → 是总线通信吗?
│ ├── 是 → 开漏输出 + 外部上拉
│ └── 否 → 推挽输出(默认)
│
└── 否 → 是模拟信号吗?
├── 是 → 模拟输入(仅支持引脚)
└── 否 → 数字输入检测
├── 按键到GND → 上拉输入
├── 按键到VCC → 下拉输入
├── 外部确定电平 → 浮空输入
└── 外设功能 → 复用模式
5.2 常用场景配置模板
模板1:LED控制(推挽输出)
void LED_Config(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
GPIO_InitTypeDef GPIO_InitStruct;
// 时钟使能(根据具体GPIO端口)
if(GPIOx == GPIOA) RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
else if(GPIOx == GPIOB) RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
// ... 其他端口
GPIO_InitStruct.GPIO_Pin = GPIO_Pin;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOx, &GPIO_InitStruct);
}
模板2:按键检测(上拉输入)
void KEY_Config(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
GPIO_InitTypeDef GPIO_InitStruct;
// 时钟使能
if(GPIOx == GPIOA) RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
// ... 其他端口
GPIO_InitStruct.GPIO_Pin = GPIO_Pin;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; // 按键到GND
GPIO_Init(GPIOx, &GPIO_InitStruct);
}
uint8_t KEY_Read(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
return GPIO_ReadInputDataBit(GPIOx, GPIO_Pin) == Bit_RESET;
// 返回1表示按键按下,0表示松开
}
模板3:I2C总线(复用开漏)
void I2C_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
// 使能GPIO和I2C时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
// PB6->I2C1_SCL, PB7->I2C1_SDA
GPIO_InitStruct.GPIO_Pin = G PIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStruct.GPIO_OType = GPIO_OType_OD;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOB, &GPIO_InitStruct);
// 复用功能映射
GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_I2C1);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_I2C1);
}
5.3 核心函数速查手册
| 功能类别 | 函数 | 说明 |
|---|---|---|
| 时钟控制 | RCC_AHB1PeriphClockCmd | 使能GPIO时钟 |
| GPIO初始化 | GPIO_Init | 配置GPIO参数 |
| 电平控制 | GPIO_SetBits | 设置高电平 |
GPIO_ResetBits | 设置低电平 | |
GPIO_ToggleBits | 电平翻转 | |
| 电平读取 | GPIO_ReadInputDataBit | 读取引脚状态 |
| 复用功能 | GPIO_PinAFConfig | 配置引脚复用 |
六、常见陷阱与最佳实践
6.1 必须避免的经典错误
❌ 错误1:开漏输出忘记上拉电阻
// 错误配置 - I2C无法正常工作
GPIO_InitStruct.GPIO_OType = GPIO_OType_OD;
// 忘记外部上拉电阻!
✅ 正确做法:
// 硬件:添加4.7kΩ上拉电阻到3.3V
// 软件配置正确
GPIO_InitStruct.GPIO_OType = GPIO_OType_OD;
❌ 错误2:浮空输入引脚悬空
// 危险配置 - 电平随机波动
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
// 引脚悬空!
✅ 正确做法:
// 确保外部电路确定电平
// 或改用上拉/下拉输入
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; // 或GPIO_PuPd_DOWN
❌ 错误3:超过驱动电流限制
// 同时驱动多个大电流设备
GPIO_SetBits(GPIOF, GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12);
// 可能超过端口总电流限制!
✅ 正确做法:
// 分时驱动或使用外部驱动电路
// 检查芯片数据手册的电流限制
6.2 最佳实践指南
✅ 实践1:模块化配置函数
// 好的实践:封装可重用函数
void GPIO_Output_Init(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
GPIO_InitTypeDef GPIO_InitStruct;
// 时钟使能逻辑
// GPIO配置
// 初始化
}
// 使用
GPIO_Output_Init(GPIOF, GPIO_Pin_9);
GPIO_Output_Init(GPIOF, GPIO_Pin_10);
✅ 实践2:使用位带操作提高效率
// 对于频繁操作的LED,可以使用位带操作
#define LED0_PF9 *(volatile uint32_t*)(0x42000000 + (0x40021414-0x40000000)*32 + 9*4)
// 直接操作,效率更高
LED0_PF9 = 1; // 点亮
LED0_PF9 = 0; // 熄灭
✅ 实践3:未使用引脚处理
// 将未使用引脚配置为模拟输入,降低功耗
GPIO_InitStruct.GPIO_Pin = UNUSED_PINS;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AN;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOx, &GPIO_InitStruct);
七、调试技巧与问题排查
7.1 常见问题诊断表
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| LED不亮 | 时钟未使能 | 检查RCC_AHB1PeriphClockCmd调用 |
| 输出电平不正确 | 模式配置错误 | 确认GPIO_Mode和GPIO_OType |
| I2C通信失败 | 忘记上拉电阻 | 检查SCL/SDA线上拉电阻 |
| 按键检测异常 | 上下拉配置错误 | 根据按键电路选择正确模式 |
| 功耗异常高 | 引脚配置不当 | 未使用引脚配置为模拟输入 |
7.2 使用调试器验证配置
// 在调试器中检查寄存器值
printf("GPIOF_MODER = 0x%08X\n", GPIOF->MODER);
printf("GPIOF_OTYPER = 0x%04X\n", GPIOF->OTYPER);
printf("GPIOF_OSPEEDR = 0x%08X\n", GPIOF->OSPEEDR);
printf("GPIOF_PUPDR = 0x%08X\n", GPIOF->PUPDR);
总结
通过本文的深入学习,你应该已经掌握了:
- GPIO八种工作模式的原理和适用场景
- 标准库开发的完整流程和最佳实践
- 常见陷阱的识别和规避方法
- 高效调试和问题排查技巧
核心要诀:
- 🎯 推挽输出用于驱动,开漏输出用于总线
- 🎯 上拉输入用于按键,模拟输入用于采集
- 🎯 复用模式用于外设,浮空输入要谨慎
- 🎯 时钟使能是前提,结构体配置是核心
STM32标准库极大地降低了嵌入式开发的门槛,让开发者能够专注于业务逻辑而非底层细节。掌握这些基础后,你可以 confidently 迈向外设驱动、通信协议等更高级的主题。
下一步学习建议:
- 学习USART串口通信
- 掌握SPI和I2C总线协议
- 了解定时器和PWM应用
- 探索中断和DMA技术
Happy Coding! 🚀

















 946
946

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









