




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
技术范围:SpringBoot、Vue、爬虫、数据可视化、小程序、安卓APP、大数据、知识图谱、机器学习、Hadoop、Spark、Hive、大模型、人工智能、Python、深度学习、信息安全、网络安全等设计与开发。
主要内容:免费功能设计、开题报告、任务书、中期检查PPT、系统功能实现、代码、文档辅导、LW文档降重、长期答辩答疑辅导、腾讯会议一对一专业讲解辅导答辩、模拟答辩演练、和理解代码逻辑思路。
🍅文末获取源码联系🍅
🍅文末获取源码联系🍅
🍅文末获取源码联系🍅
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及LW文档编写等相关问题都可以给我留言咨询,希望帮助更多的人
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
运
以下是一篇关于《YOLO+大模型遥感影像识别分析可视化系统》的开题报告框架及内容示例,供参考:
开题报告
题目:YOLO+大模型遥感影像识别分析可视化系统
专业/方向:计算机科学与技术/遥感与地理信息系统
学生姓名:XXX
指导教师:XXX
一、研究背景与意义
1.1 研究背景
遥感影像技术是地理信息获取、环境监测、灾害预警等领域的核心手段。随着卫星与无人机技术的快速发展,遥感影像的分辨率和覆盖范围显著提升,但海量数据的高效处理与分析仍面临挑战。传统遥感影像分析方法依赖人工解译或浅层机器学习模型,存在效率低、泛化能力弱等问题。
近年来,深度学习(尤其是目标检测模型YOLO系列)在遥感影像识别中展现出显著优势,能够快速提取地物特征并实现高精度分类。同时,大模型(如Transformer架构的ViT、Swin Transformer等)通过自监督学习与海量数据预训练,进一步提升了模型对复杂场景的泛化能力。然而,现有研究多聚焦于单一模型优化,缺乏对多模型协同、实时分析以及可视化交互的整合,难以满足实际应用中“高效-精准-直观”的需求。
1.2 研究意义
本课题旨在结合YOLO的实时检测能力与大模型的强泛化特征提取能力,构建一套遥感影像智能识别分析可视化系统,实现以下目标:
- 高效性:通过轻量化YOLO模型实现快速目标检测,结合大模型进行复杂场景语义分割;
- 精准性:利用大模型的迁移学习能力提升小样本场景下的识别精度;
- 可视化交互:提供直观的影像标注、结果展示与用户交互功能,降低遥感数据分析门槛。
研究成果可应用于城市规划、农业监测、灾害评估等领域,为遥感影像的智能化处理提供技术支撑。
二、国内外研究现状
2.1 遥感影像目标检测研究
- 传统方法:基于阈值分割、边缘检测等算法,依赖人工特征设计,泛化性差。
- 深度学习方法:YOLO系列(YOLOv5/v7/v8)因其速度优势被广泛用于遥感影像车辆、建筑等目标检测;Faster R-CNN等两阶段模型精度更高但速度较慢。
- 挑战:遥感影像中目标尺度差异大、背景复杂,单一模型难以兼顾速度与精度。
2.2 大模型在遥感领域的应用
- 预训练模型:ViT、MAE等通过自监督学习从海量无标注数据中学习通用特征,迁移至遥感任务时需少量标注数据即可微调。
- 多模态融合:结合光谱、空间、时序信息(如时序Transformer)提升分类精度。
- 挑战:大模型参数量大,计算资源需求高,实时性不足。
2.3 可视化系统研究
现有遥感可视化工具(如Google Earth Engine、QGIS)多侧重数据展示,缺乏智能分析模块;部分研究(如RSNet)集成深度学习模型,但未结合大模型与轻量化检测模型的协同优势。
三、研究内容与技术路线
3.1 研究内容
- 模型融合与优化
- 设计YOLO与大模型的协同架构:YOLO负责快速目标检测,大模型(如Swin Transformer)进行像素级语义分割与细节修正。
- 引入知识蒸馏技术,将大模型知识迁移至轻量化YOLO模型,平衡速度与精度。
- 遥感影像预处理与增强
- 针对遥感影像多光谱、高分辨率特点,研究数据增强方法(如光谱混合、几何变换)提升模型鲁棒性。
- 可视化系统开发
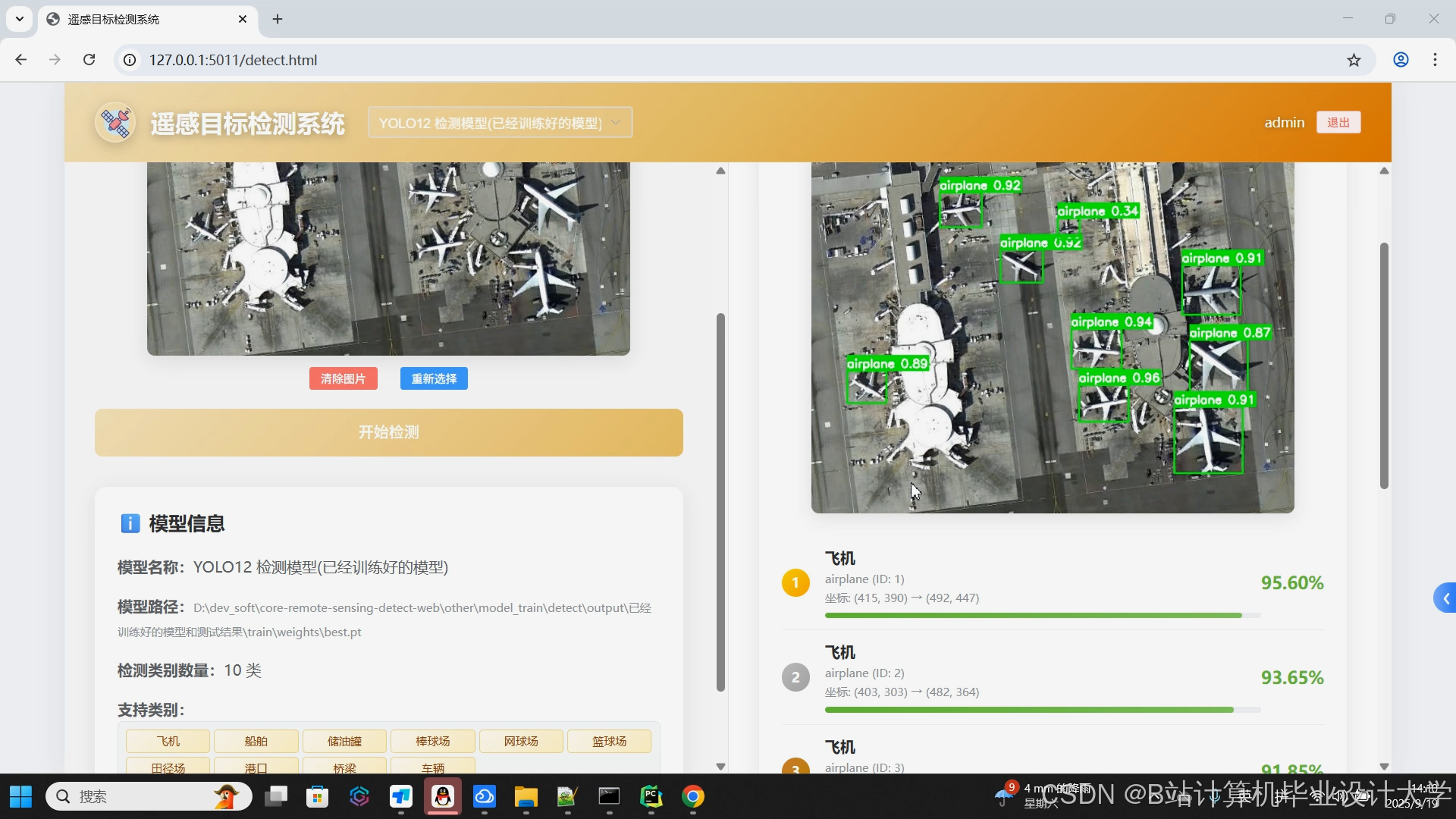
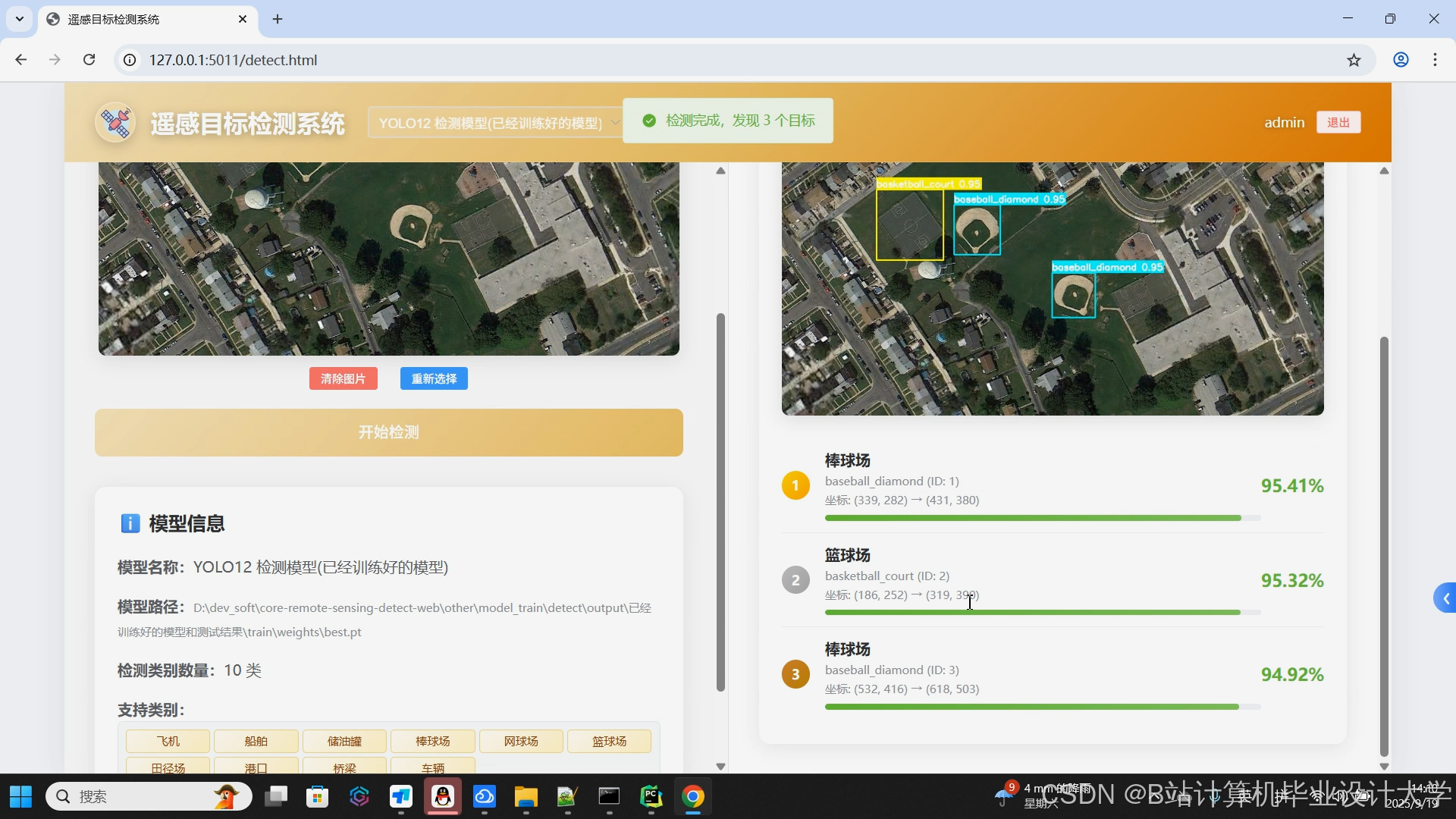
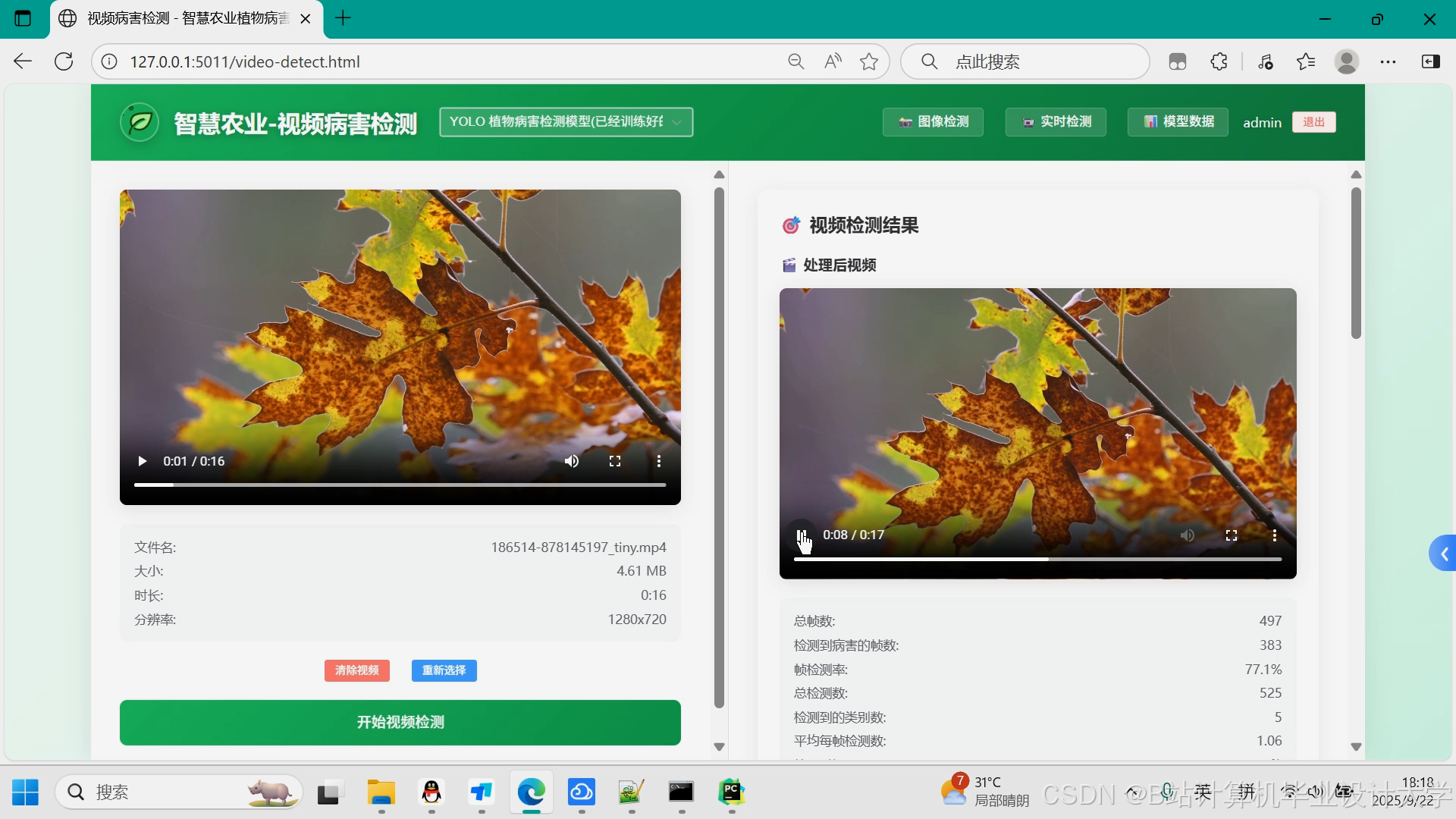
- 基于Web或桌面端框架(如PyQt、Django)开发交互界面,支持影像上传、模型推理、结果可视化与标注修正。
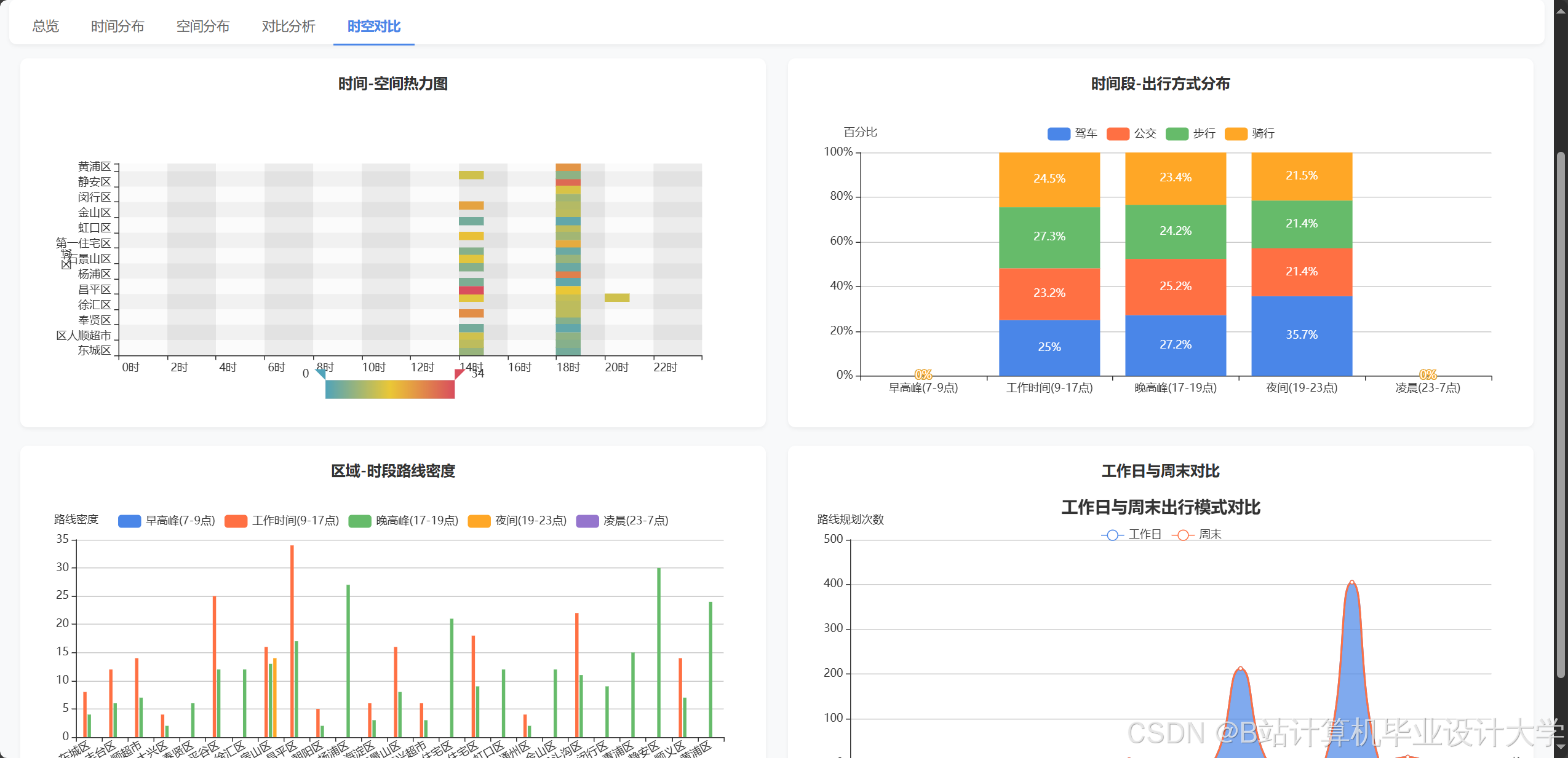
- 集成可视化库(如Matplotlib、OpenCV)实现检测结果的热力图、边界框叠加展示。
3.2 技术路线
mermaid
1graph TD
2 A[遥感影像数据集] --> B[数据预处理与增强]
3 B --> C[YOLO目标检测]
4 B --> D[大模型语义分割]
5 C --> E[检测结果融合]
6 D --> E
7 E --> F[可视化交互界面]
8 F --> G[用户反馈与模型迭代]四、创新点与预期成果
4.1 创新点
- 模型协同机制:首次将YOLO的实时检测能力与大模型的强泛化能力结合,解决单一模型在遥感场景中的局限性。
- 轻量化部署:通过知识蒸馏与模型剪枝,实现大模型在边缘设备上的低延迟推理。
- 可视化交互闭环:支持用户对检测结果的实时修正,形成“模型推理-用户反馈-模型优化”的闭环系统。
4.2 预期成果
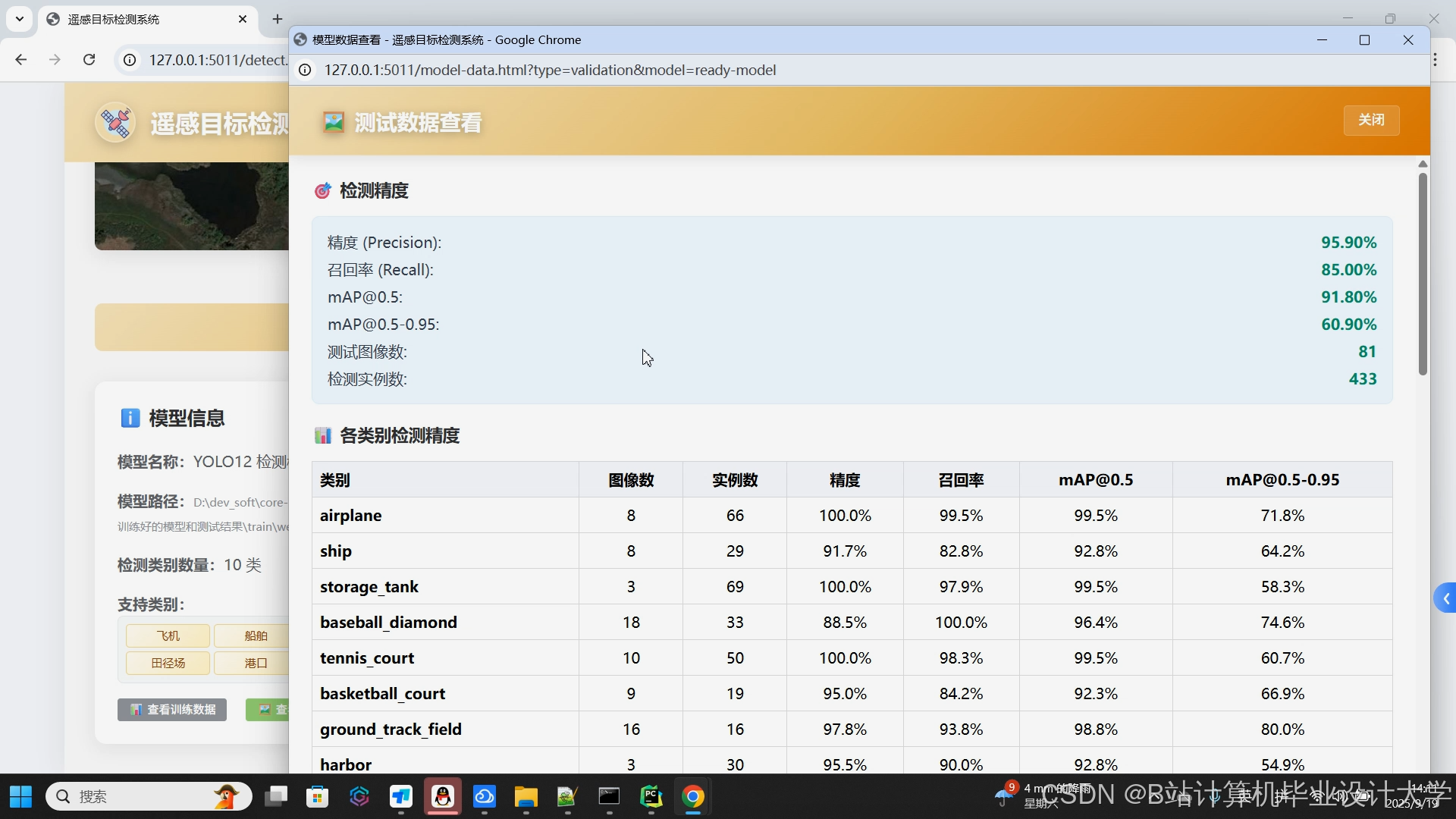
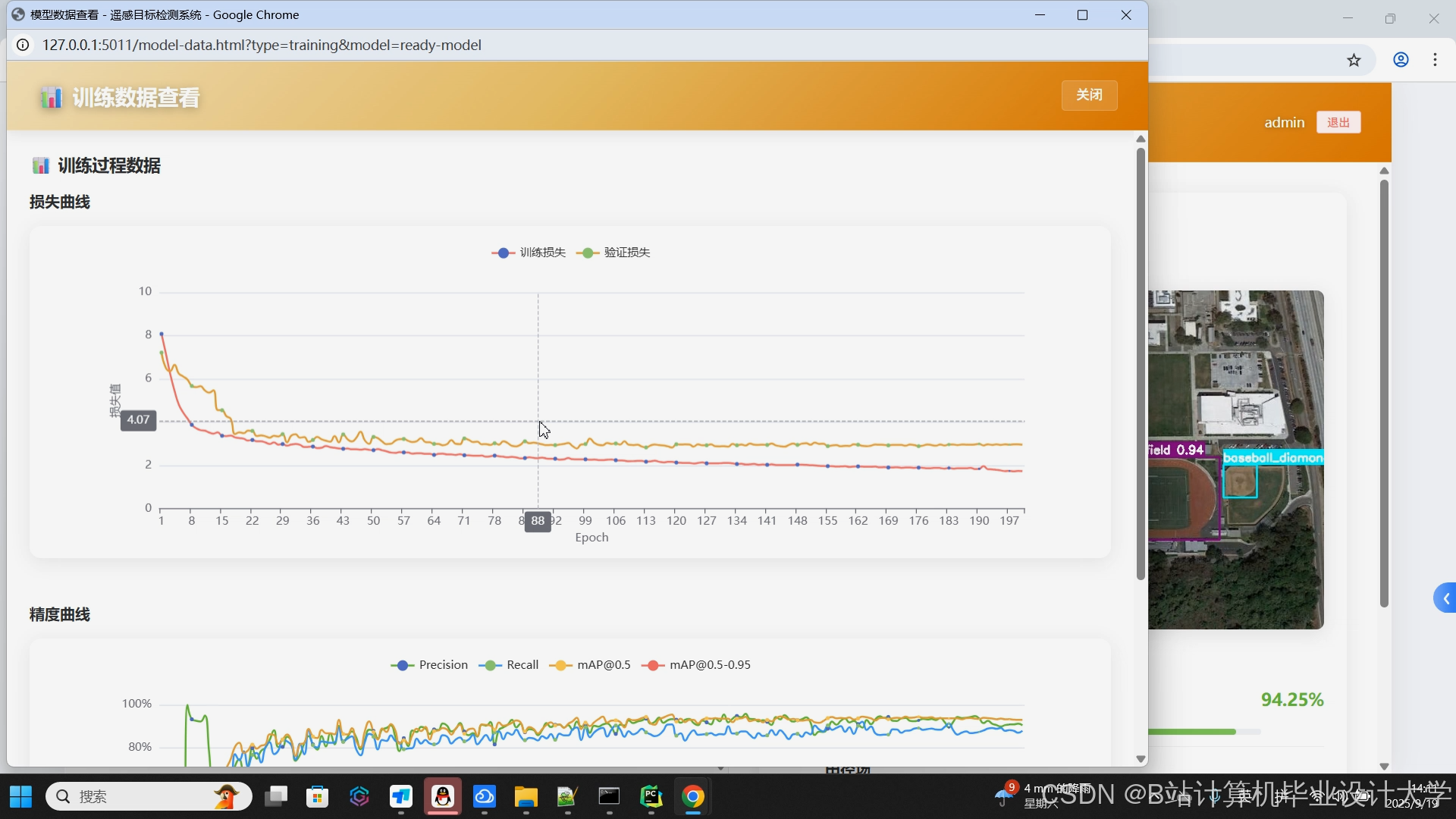
- 完成YOLO+大模型的协同训练与优化,在公开遥感数据集(如DOTA、NWPU-RESISC45)上达到SOTA精度;
- 开发一套可扩展的遥感影像分析可视化系统,支持多场景任务(如目标检测、地物分类、变化检测);
- 发表高水平学术论文1-2篇,申请软件著作权1项。
五、研究计划与进度安排
| 阶段 | 时间 | 任务 |
|---|---|---|
| 文献调研 | 第1-2月 | 梳理YOLO、大模型、遥感可视化相关研究,确定技术路线。 |
| 数据准备 | 第3月 | 收集并标注遥感影像数据集,划分训练集/测试集。 |
| 模型开发 | 第4-6月 | 实现YOLO与大模型协同训练,优化模型结构与超参数。 |
| 系统开发 | 第7-8月 | 完成可视化界面开发,集成模型推理与结果展示功能。 |
| 测试与优化 | 第9月 | 在真实场景中测试系统性能,根据反馈迭代优化。 |
| 论文撰写 | 第10月 | 整理研究成果,撰写毕业论文并准备答辩。 |
六、参考文献
(示例,需根据实际引用补充)
[1] Redmon J, Divvala S, Girshick R, et al. You Only Look Once: Unified, Real-Time Object Detection[C]. CVPR, 2016.
[2] Liu Z, Lin Y, Cao Y, et al. Swin Transformer: Hierarchical Vision Transformer using Shifted Windows[C]. ICCV, 2021.
[3] 王某某等. 基于深度学习的遥感影像目标检测研究进展[J]. 遥感学报, 2022.
备注:
- 可根据实际研究调整模型选择(如YOLOv8与SegFormer结合);
- 若涉及多模态数据(如SAR与光学影像融合),需补充相关技术细节;
- 可视化系统可考虑引入WebGL或Three.js实现3D遥感场景渲染。
希望以上内容对您有所帮助!
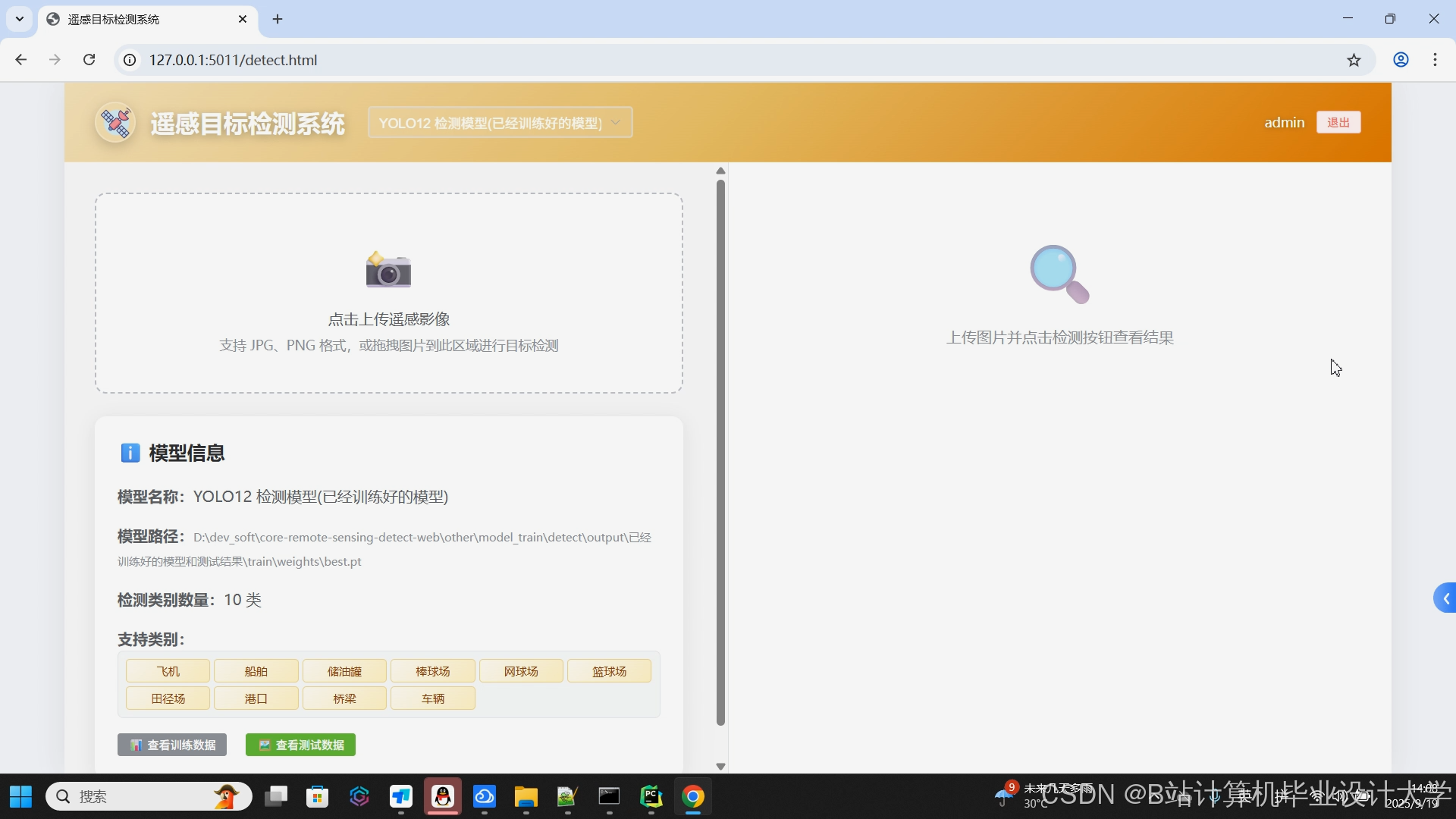
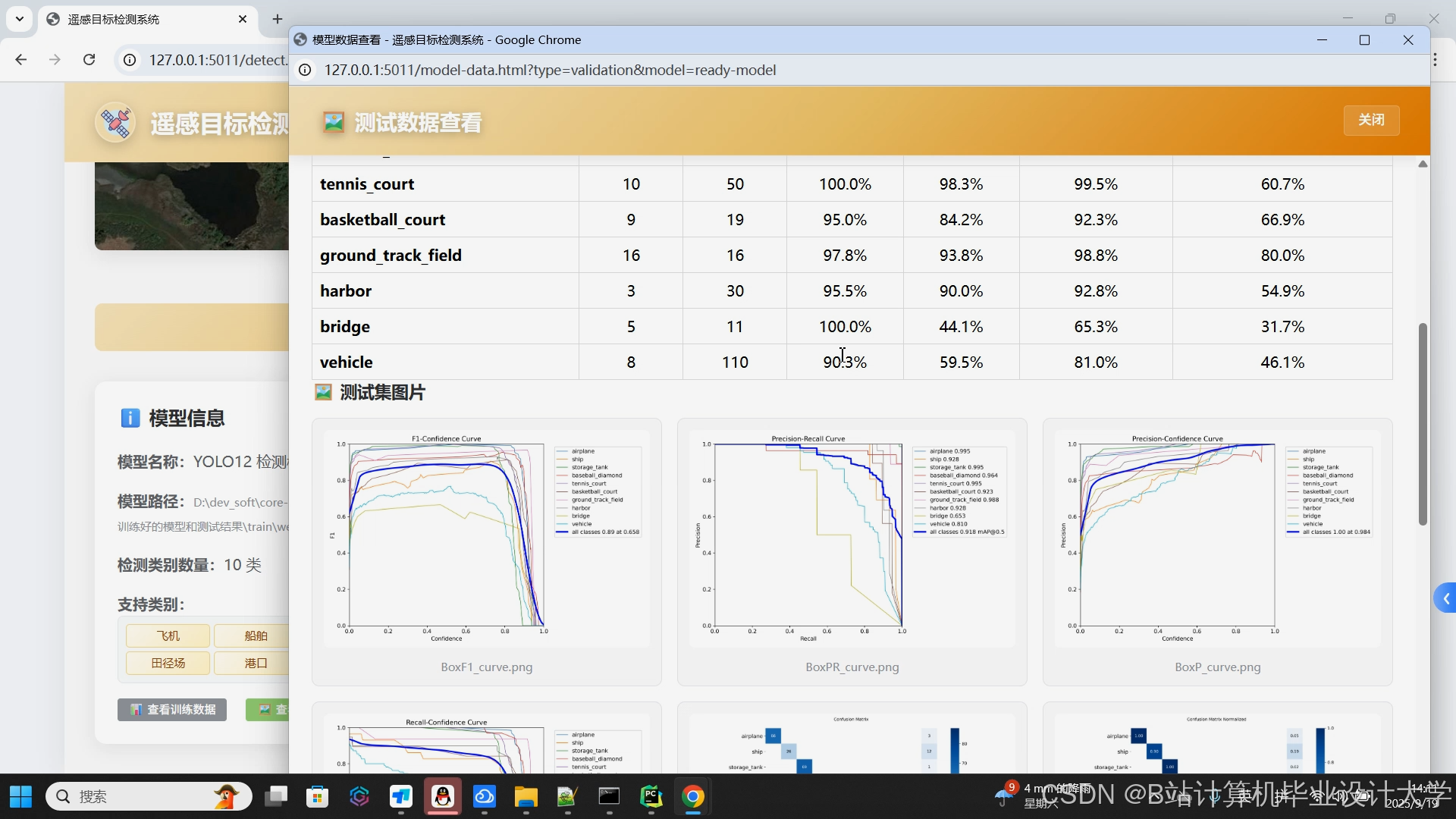
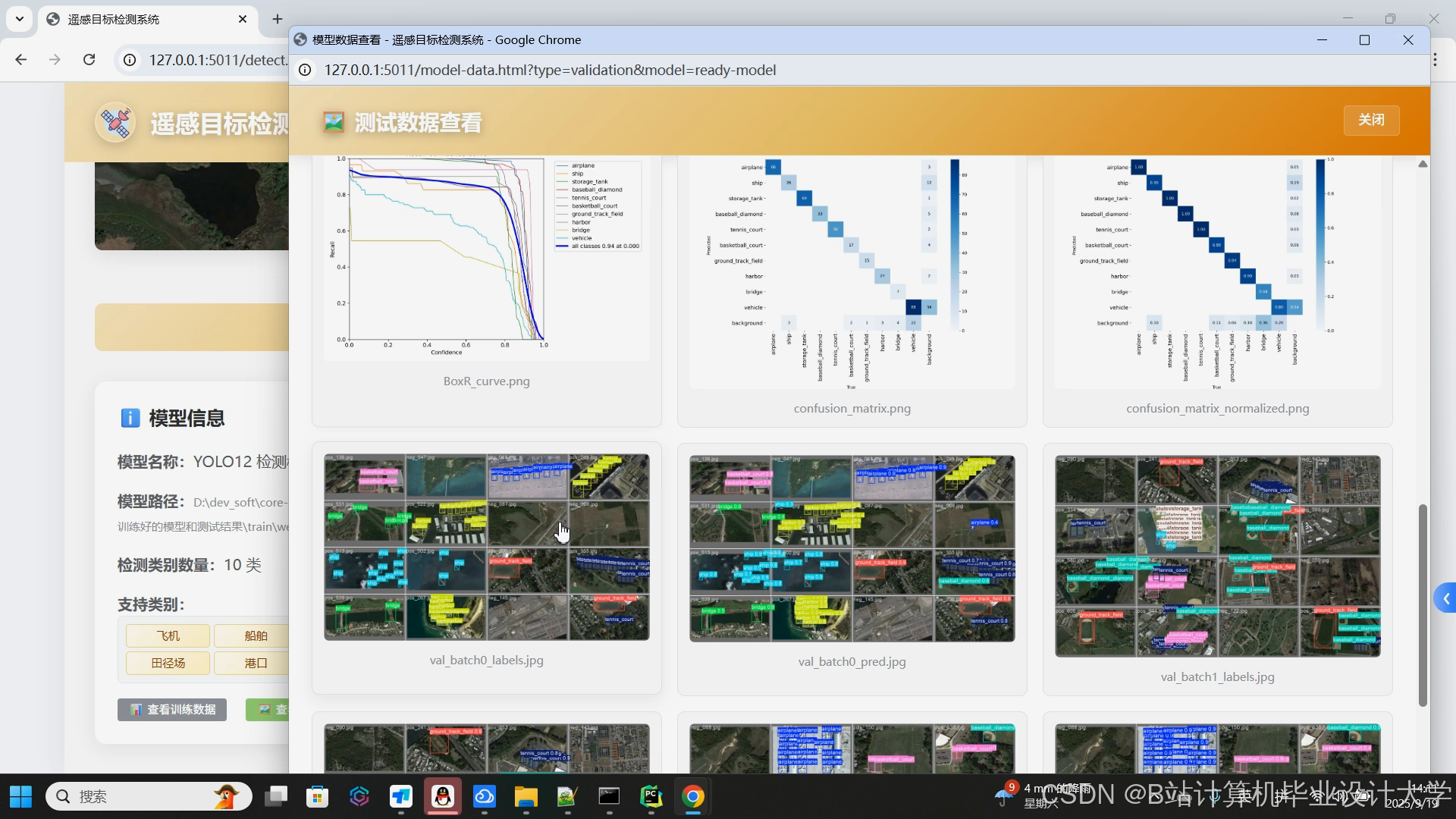
行截图
推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例









优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

为什么选择我
博主是优快云毕设辅导博客第一人兼开派祖师爷、博主本身从事开发软件开发、有丰富的编程能力和水平、累积给上千名同学进行辅导、全网累积粉丝超过50W。是优快云特邀作者、博客专家、新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交流和合作。
🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查↓↓↓↓↓↓获取联系方式↓↓↓↓↓↓↓↓


















 952
952

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











