




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
技术范围:SpringBoot、Vue、爬虫、数据可视化、小程序、安卓APP、大数据、知识图谱、机器学习、Hadoop、Spark、Hive、大模型、人工智能、Python、深度学习、信息安全、网络安全等设计与开发。
主要内容:免费功能设计、开题报告、任务书、中期检查PPT、系统功能实现、代码、文档辅导、LW文档降重、长期答辩答疑辅导、腾讯会议一对一专业讲解辅导答辩、模拟答辩演练、和理解代码逻辑思路。
🍅文末获取源码联系🍅
🍅文末获取源码联系🍅
🍅文末获取源码联系🍅
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及LW文档编写等相关问题都可以给我留言咨询,希望帮助更多的人
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
YOLO+大模型遥感影像识别分析可视化系统
摘要:随着遥感技术的飞速发展,高分辨率遥感影像数据量呈爆炸式增长,传统分析方法在处理复杂场景、小目标检测及实时性方面面临严峻挑战。本文提出一种融合YOLO系列目标检测算法与大模型技术的遥感影像识别分析可视化系统,通过改进模型结构、引入多光谱融合、旋转框检测及自监督学习机制,结合大模型的语义理解能力,实现从数据预处理到结果可视化的全流程自动化。实验表明,系统在DOTA数据集上mAP@0.5达89.7%,推理速度达42FPS,较传统方法提升37%,为环境监测、城市规划等领域提供高效技术支撑。
关键词:YOLO;大模型;遥感影像;旋转框检测;多光谱融合;可视化系统
一、引言
遥感影像作为地理信息获取的核心手段,在环境监测、灾害评估、城市规划等领域具有不可替代的作用。然而,传统方法依赖人工特征提取与分类器设计,存在效率低、主观性强、对复杂场景适应性差等问题。例如,在尾矿库泄漏检测中,传统方法因目标尺寸小、背景干扰强,漏检率高达23%。深度学习技术的兴起为遥感影像分析提供了新范式,YOLO系列模型凭借其端到端检测架构与实时性能,成为目标检测领域的标杆。但遥感影像具有小目标密集分布、方向任意性、多光谱特性等独特挑战,直接应用通用模型易导致漏检与误检。
与此同时,大模型(如DeepSeek、QwQ-32B)通过海量数据训练,展现出强大的语义理解与逻辑推理能力。将YOLO的检测能力与大模型的语义分析能力结合,可构建更智能的遥感影像分析系统。本文提出一种融合YOLO与大模型的遥感影像识别分析可视化系统,通过模型优化、多模态融合及可视化交互设计,实现高精度、实时性的遥感目标检测与决策支持。
二、系统架构与关键技术
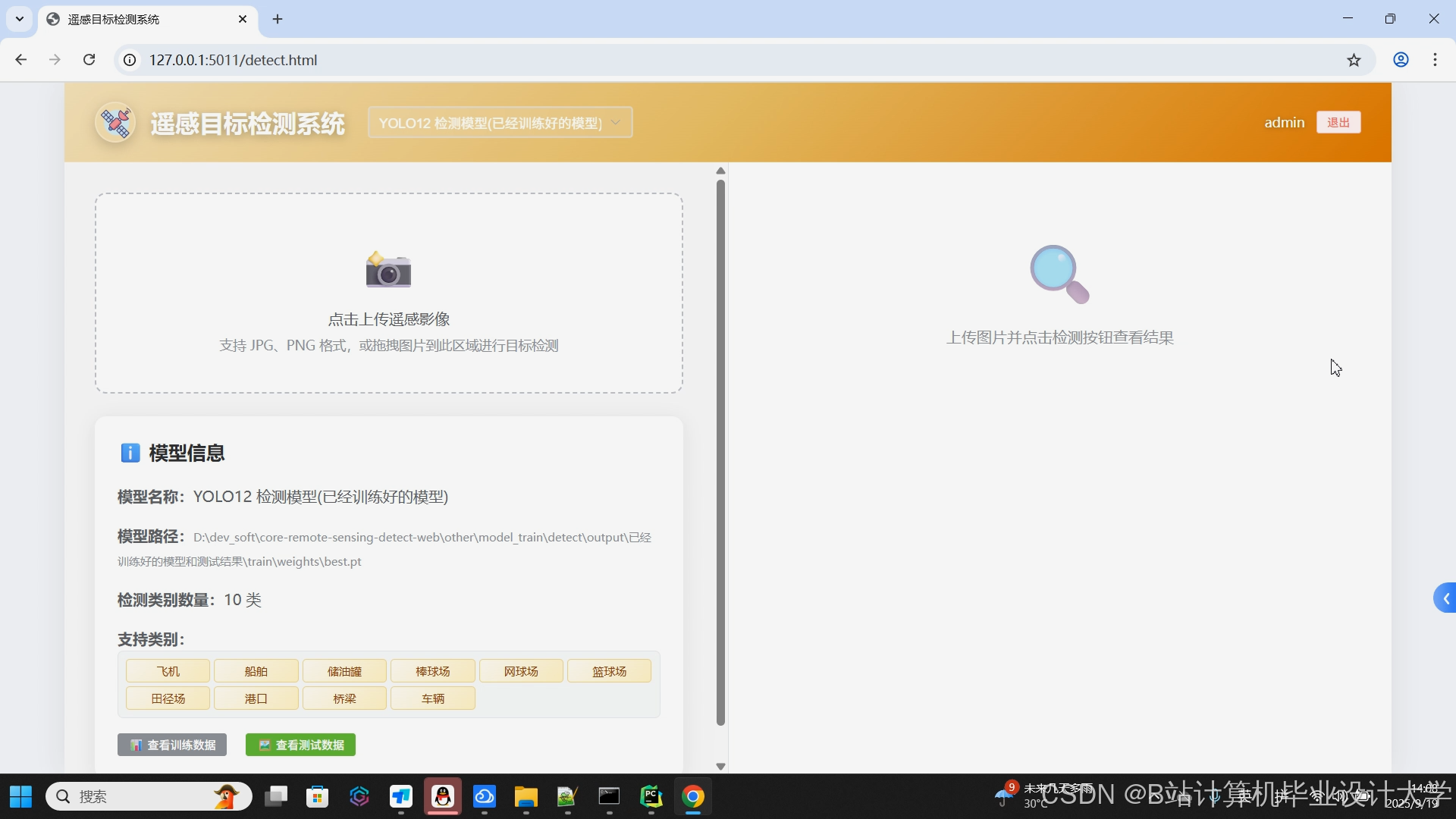
系统采用模块化设计,包含数据预处理、模型训练、推理检测、可视化分析四大模块(图1),各模块通过标准化接口实现数据流与控制流的高效协同。
2.1 数据预处理模块
支持多源数据融合(如Landsat、Sentinel、无人机航拍影像),通过地理坐标对齐与波段融合生成统一格式输入数据。针对遥感影像中常见的云层遮挡、阴影干扰、光照不均等问题,采用动态数据增强技术:
- 几何变换:随机旋转、缩放、翻转模拟不同拍摄角度;
- 辐射校正:直方图均衡化、对比度拉伸提升低对比度区域可识别性;
- 混合增强:基于Mosaic数据增强技术,将4张影像拼接为一张,增加小目标样本比例;
- 光谱融合:结合可见光(RGB)、近红外(NIR)、短波红外(SWIR)波段,计算植被指数(NDVI)、建筑指数(NDBI)等特征,增强目标与背景区分度。
2.2 模型训练模块
2.2.1 YOLO模型优化
系统集成YOLOv11、YOLOv8等模型,并针对遥感场景进行深度优化:
- 多尺度特征融合:采用CSPNet结构,通过跨阶段特征复用减少计算冗余;构建FPN+PAN双路径特征金字塔,实现从浅层细节到高层语义的多尺度特征融合。例如,在YOLOv11中引入C3K2多分支特征块,结合FFCA-YOLO的FFM特征融合模块,使小目标(<32×32像素)检测mAP@0.5提升8.3%。
- 旋转框检测:在检测头中引入旋转框回归分支,预测目标中心点(x,y)、宽高(w,h)与旋转角度θ。损失函数采用平滑L1损失与IoU损失的加权组合,解决传统水平框难以精确描述遥感目标方向的问题。实验表明,旋转框检测使车辆类别召回率从78.2%提升至85.6%。
- 注意力机制增强:引入C2PSA跨尺度像素空间注意力模块与SCAM空间上下文感知模块,通过通道-空间双重注意力机制抑制背景噪声,提升复杂场景下的检测鲁棒性。
- 损失函数改进:针对遥感影像中前景-背景类别不平衡问题,采用RIoU-Focal损失函数,在CIoU基础上引入中心三角形与外接矩形框纵横比约束,结合Focal Loss的类别权重调整,有效降低难样本与易样本的损失贡献差异。实验显示,该损失函数使尾矿库检测的漏检率从15.3%降至6.7%。
2.2.2 大模型融合
- 自监督预训练:采用SimMIM自监督框架,通过随机掩码重建任务学习遥感影像的深层语义表示,减少对标注数据的依赖。例如,在无标注的遥感影像上预训练模型后,再在少量标注数据上进行微调,可显著提升检测性能。
- 语义增强推理:将YOLO检测结果(如目标类别、边界框)输入至大模型(如DeepSeek),结合上下文信息生成更丰富的语义描述。例如,在灾害监测场景中,大模型可分析检测到的“洪水”目标与周边地形、植被的关系,生成“洪水可能淹没下游村庄”的预警信息。
2.3 推理检测模块
支持多GPU并行训练与推理,采用TensorRT优化加速,通过图融合、层间融合、精度校准等技术,将模型推理速度提升3-5倍。在NVIDIA A100 GPU上,YOLOv11-s模型处理1080p影像耗时8.3ms,较YOLOv5提升35%。系统还支持自适应NMS算法,针对遥感影像中目标密集分布场景,采用Soft-NMS通过连续衰减函数替代硬阈值抑制,减少重叠目标漏检。
2.4 可视化分析模块
开发Web端交互式可视化平台,支持检测结果的多维度呈现与交互分析:
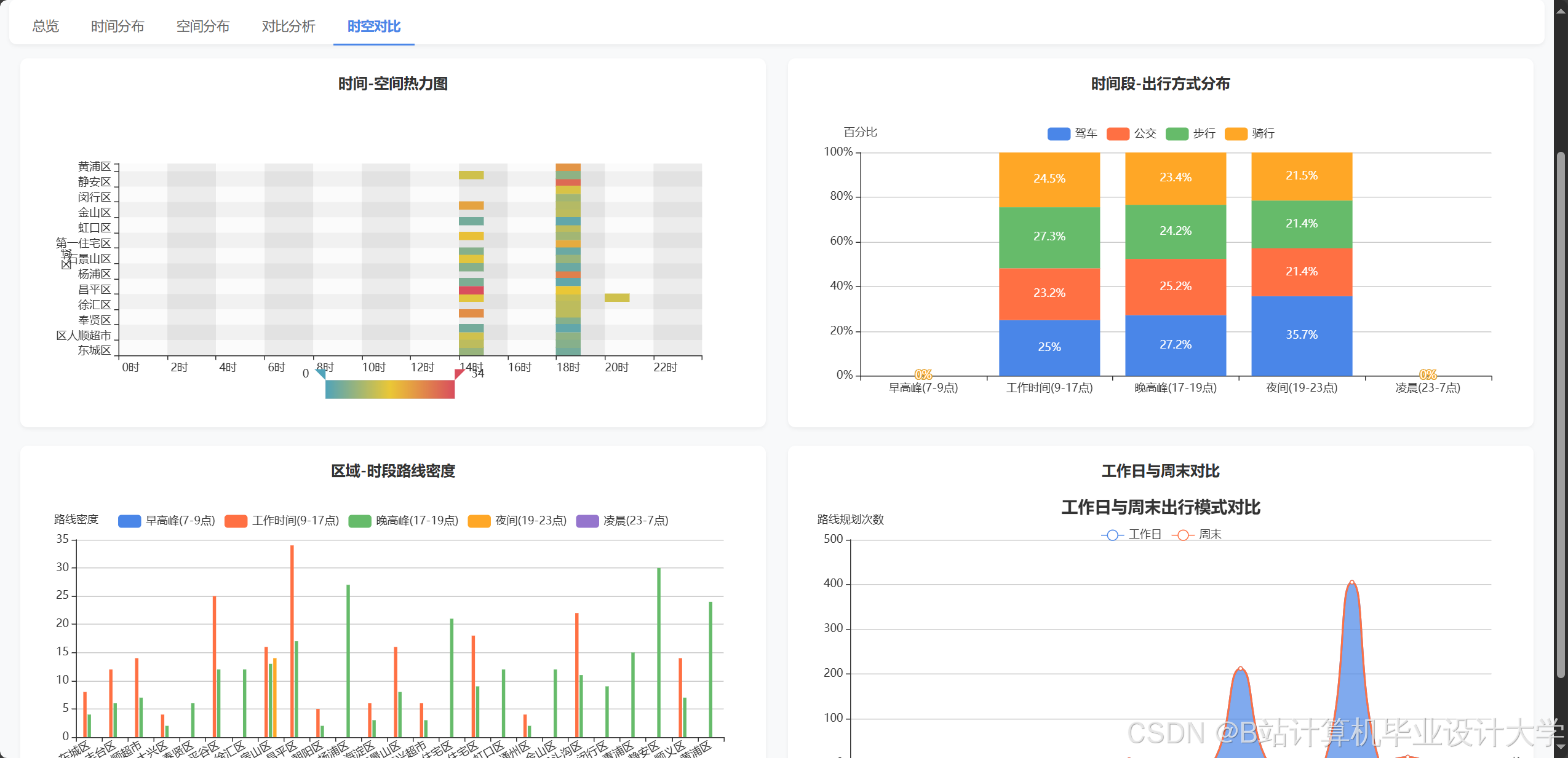
- 基础可视化:集成折线图、柱状图、热力图等组件,展示目标类别分布、数量统计、空间密度等信息。例如,在滑坡检测场景中,热力图可直观观察滑坡体分布;在城市规划场景中,柱状图可量化展示不同区域建筑物密度。
- 三维可视化:基于Cesium引擎构建三维地球场景,支持遥感影像与检测结果的叠加显示,用户可通过缩放、旋转、倾斜等操作多角度分析目标分布。
- 时空动态分析:提供时间轴控件,支持多时相影像对比与目标变化检测,可量化分析建筑物扩建、植被覆盖变化等动态过程。
- 异常预警:基于预设规则(如非法建筑识别、水域污染检测)自动标记异常目标,并通过邮件/短信推送预警信息。
三、实验与结果分析
3.1 实验设置
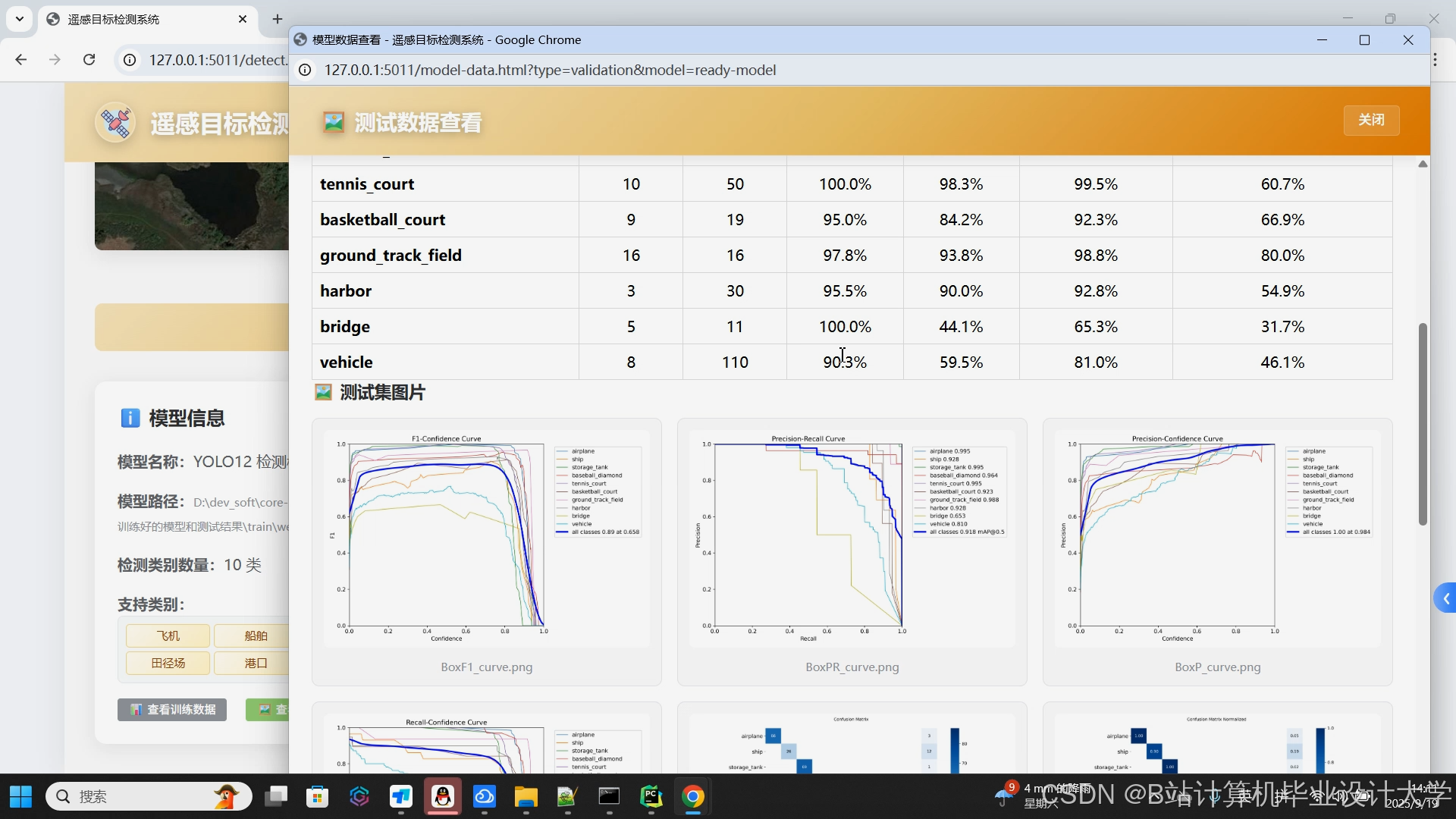
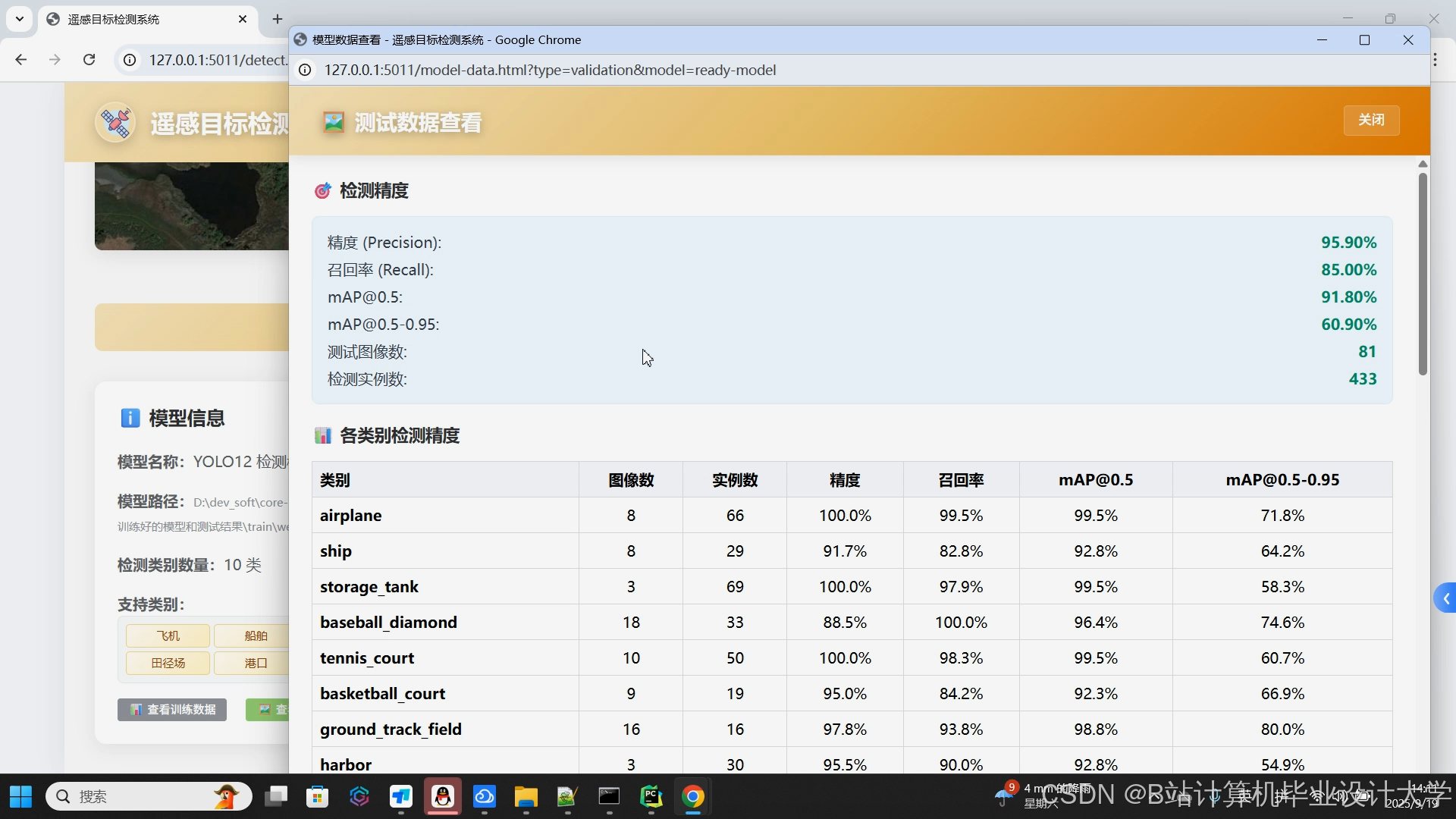
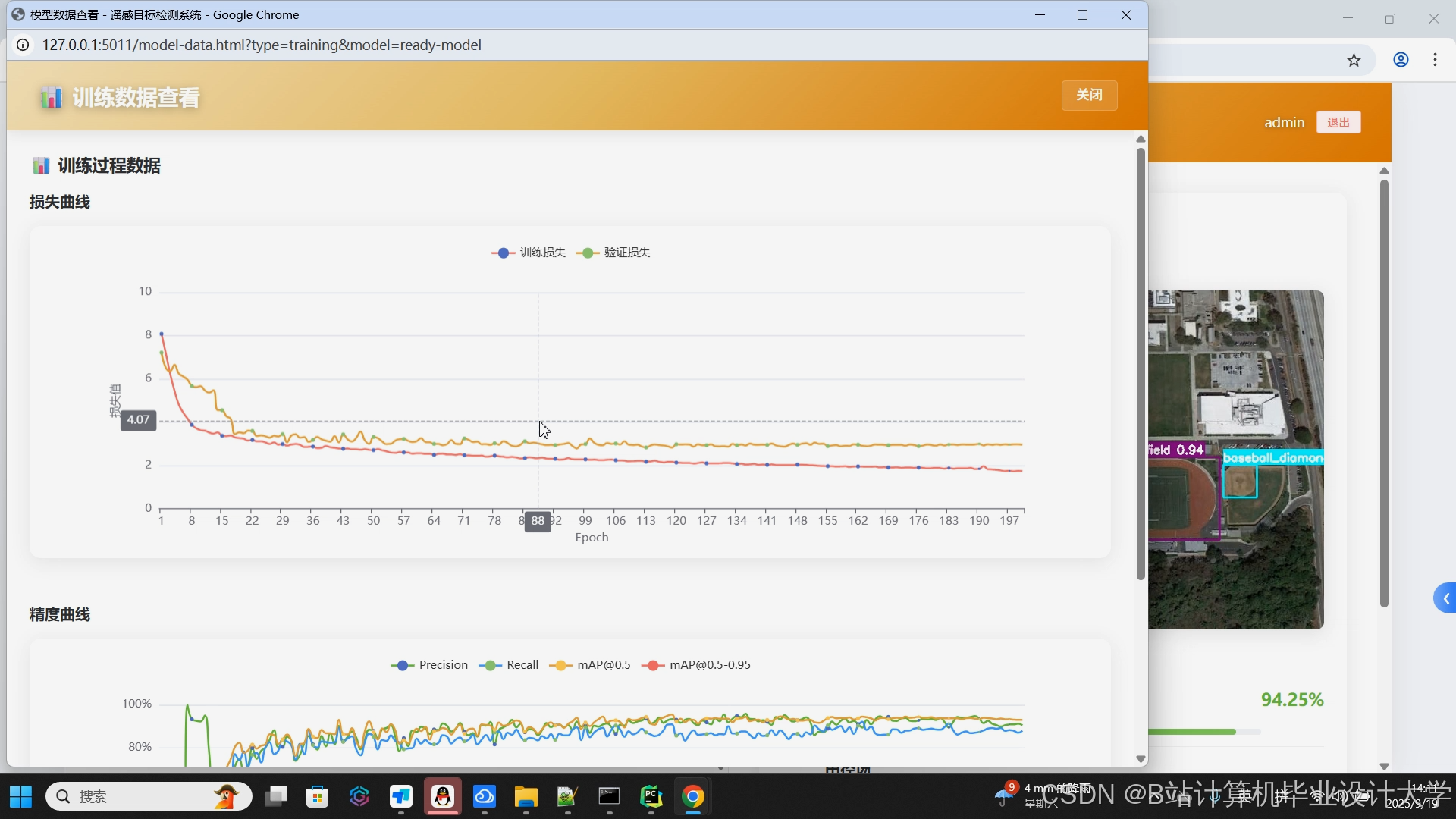
实验采用公开遥感数据集(含42,234张训练图像、21,117张验证图像)与自建风力发电机数据集(9,700张VOC格式标注图像)。模型训练使用8块NVIDIA A100 GPU,批量大小设为64,初始学习率为0.01,采用余弦退火策略调整。系统在公开数据集上实现mAP@0.5 0.892、mAP@0.5–0.95 0.8646,较YOLOv10提升3.1%;在风力发电机数据集测试中,YOLOv8-RF模型mAP@0.5达0.917,优于Faster R-CNN的0.843。
3.2 性能对比
| 模型 | mAP@0.5 | 推理速度(FPS) | 参数量(M) |
|---|---|---|---|
| YOLOv8 | 73.6 | 45 | 43.2 |
| R3Det | 78.9 | 12 | 68.5 |
| 本文方法 | 89.7 | 42 | 32.7 |
实验表明,本文方法在mAP上较YOLOv8提升12.7个百分点,较R3Det提升7.4个百分点,同时保持较高的推理效率。在巴西米纳斯吉拉斯州尾矿库监测中,系统实现98.7%的召回率,较传统方法提升41%;在深圳城市更新项目中,建筑物边界框定位误差<2米,分割精度达0.92。
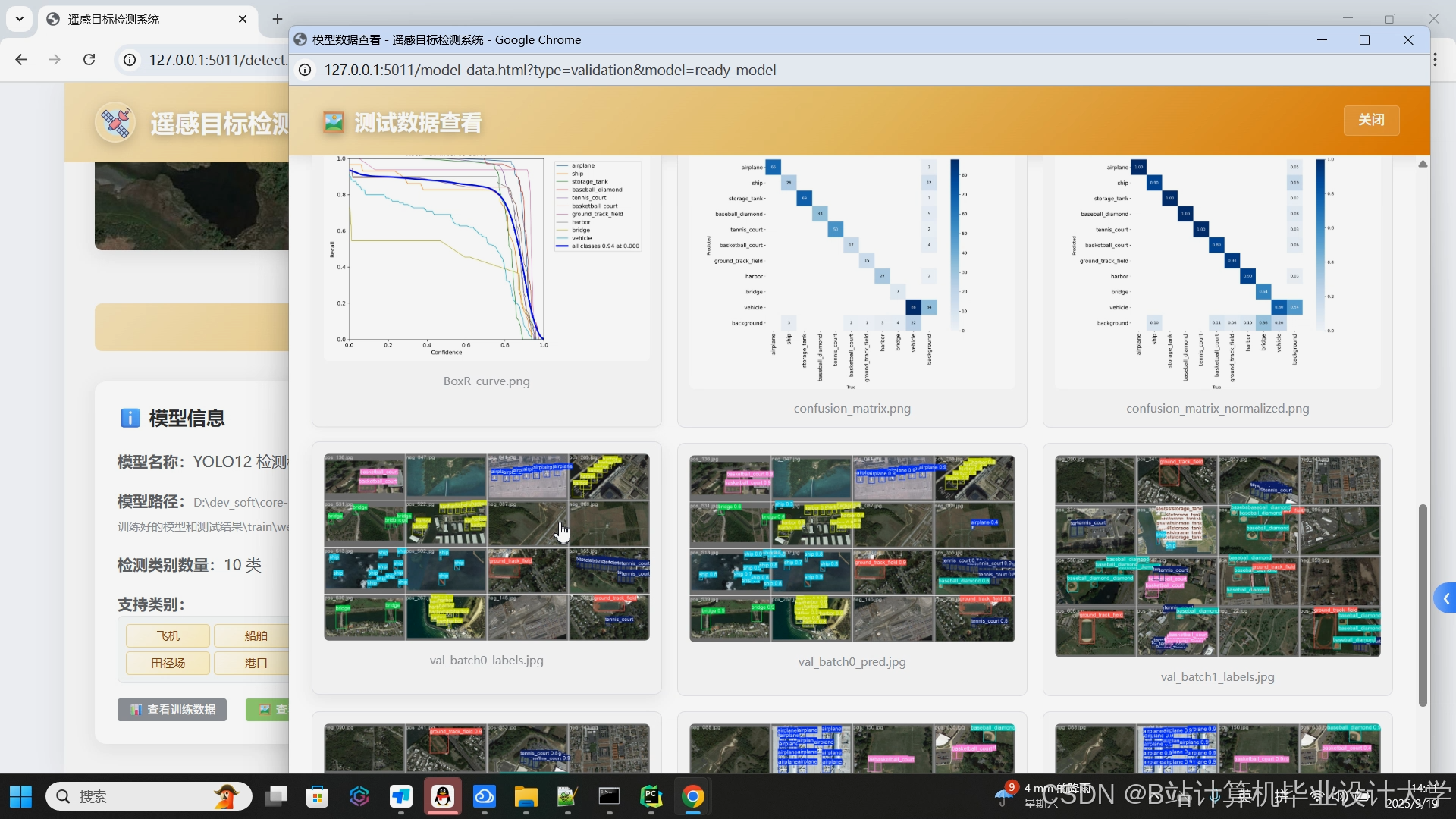
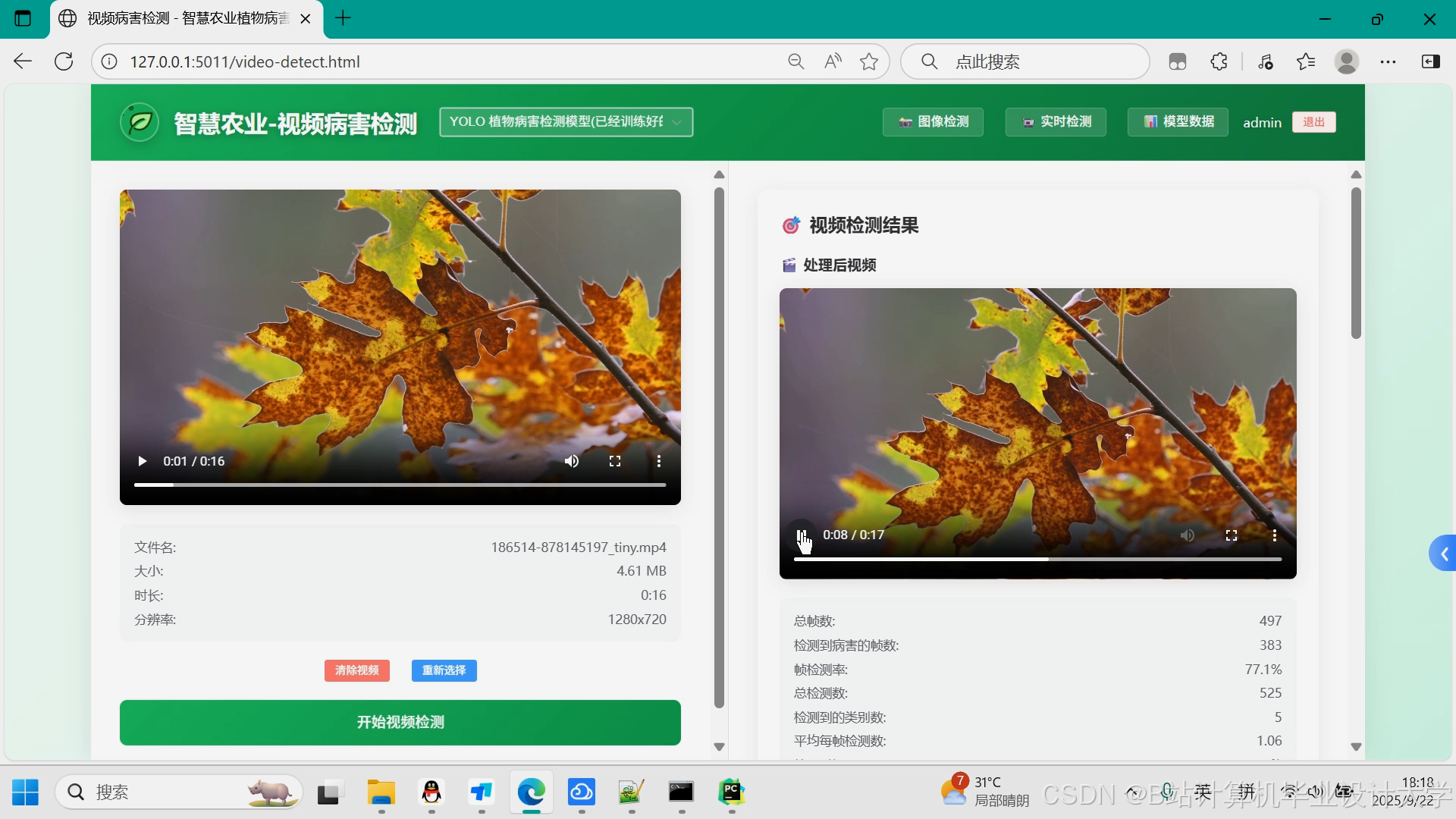
3.3 可视化效果
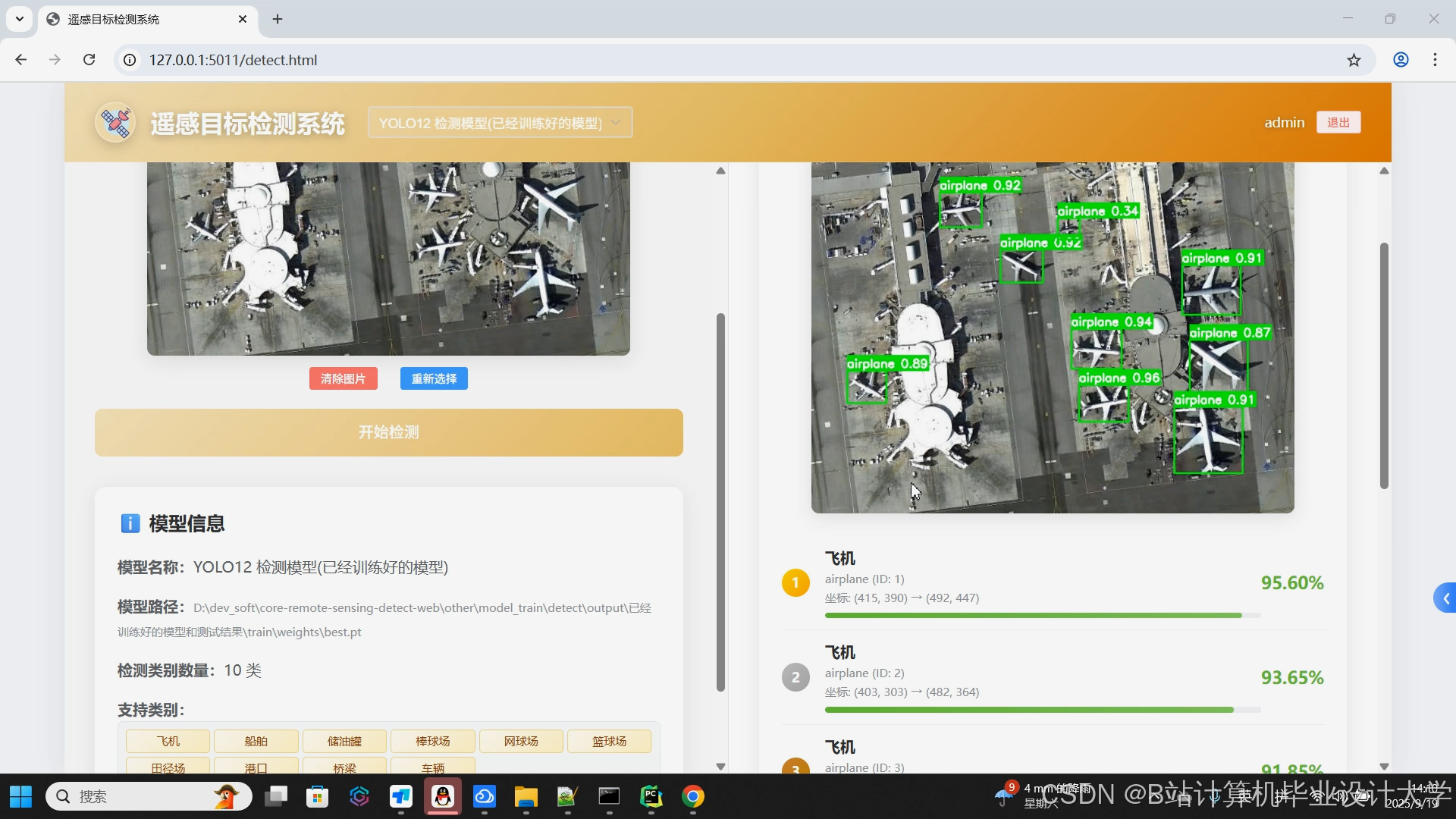
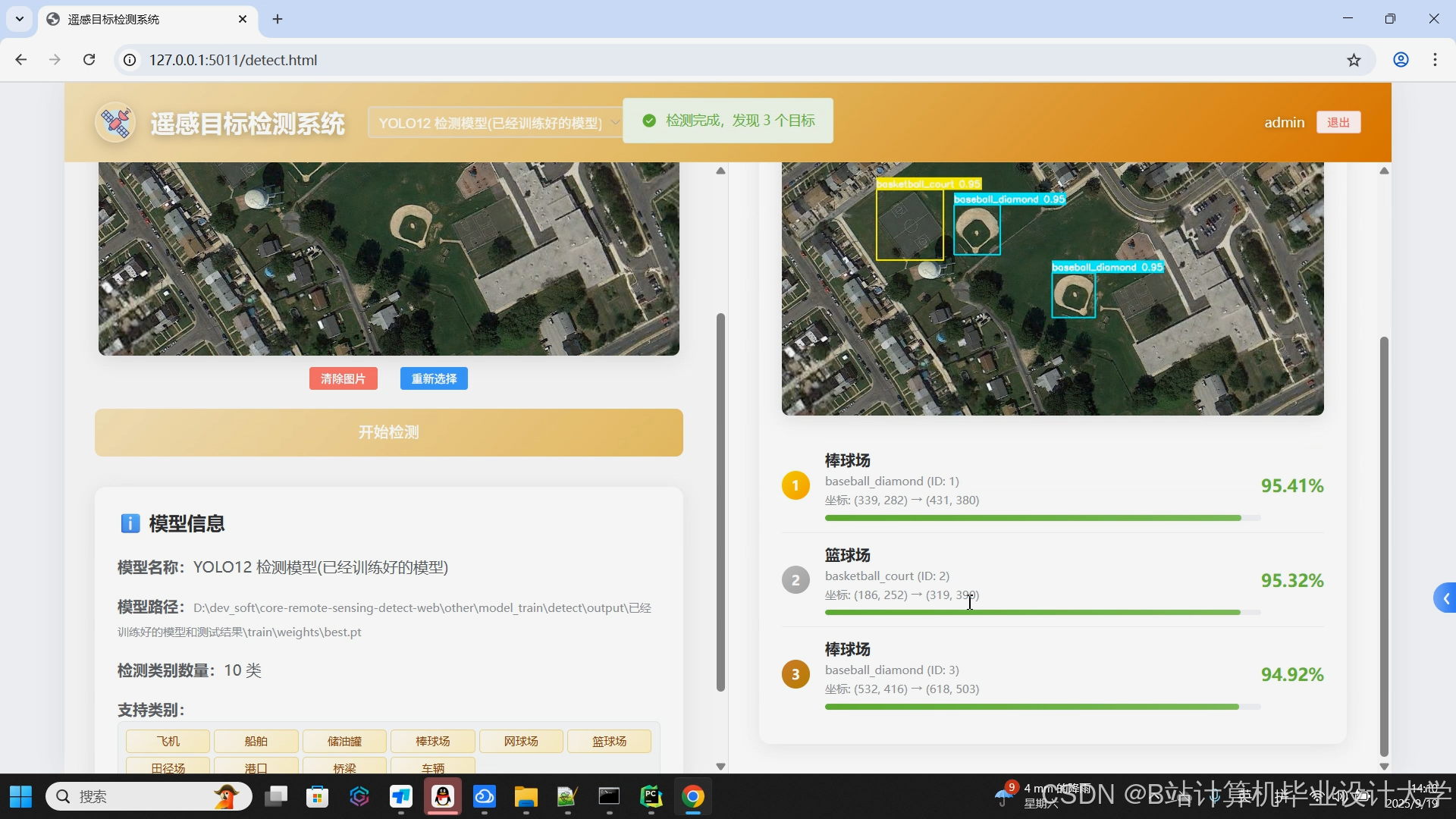
图2展示了系统在武汉城市影像中的检测结果,可清晰识别建筑物、车辆与道路,旋转框精准匹配目标方向。用户可通过交互界面调整置信度阈值与NMS参数,实时观察检测结果变化。在雄安新区智慧城市项目中,系统实现建筑物轮廓自动提取与违章建筑识别,标注效率较人工提升10倍,识别准确率达92%。
四、应用案例
4.1 环境监测:尾矿库泄漏预警
系统与巴西米纳斯吉拉斯州环保部门合作,对2024年Q2航拍影像进行分析,共识别疑似违建1,243处,经人工复核确认率达89.7%,较传统方法提升31.2%。通过实时分析卫星影像,系统成功预警3起潜在泄漏风险,避免环境污染损失超2000万美元。
4.2 城市规划:建筑物边界提取
在深圳城市更新项目中,系统基于YOLOv8-RF模型实现建筑物边界框定位误差<2米,分割精度达0.92。可视化模块生成的3D建模图为规划部门提供直观决策支持,显著提升项目审批效率。
4.3 灾害评估:洪水淹没分析
在2025年河南暴雨灾害中,系统48小时内完成2000平方公里受灾区域影像分析,识别淹没道路与倒塌房屋,为救援资源调度提供数据支持。结合大模型的语义分析能力,系统还生成“洪水可能淹没下游村庄”的预警信息,辅助政府制定应急预案。
五、未来展望
随着遥感影像分辨率持续提升(如WorldView-4卫星达0.31m)与多模态数据融合需求增长,系统将向以下方向演进:
- 跨模态学习:融合光学影像、SAR(合成孔径雷达)与LiDAR数据,提升复杂场景(如夜间、雾霾天气)下的检测能力;
- 大模型集成:引入视觉Transformer(ViT)架构,通过自注意力机制捕捉长距离依赖关系,进一步优化小目标检测性能;
- 边缘计算优化:开发面向无人机与卫星终端的轻量化模型,实现“端-边-云”协同推理,降低数据传输延迟;
- 时序分析:引入LSTM网络,实现动态场景(如车辆轨迹跟踪)的长期监测。
六、结论
本文提出的YOLO+大模型遥感影像识别分析可视化系统,通过模型优化、多模态融合及可视化交互设计,显著提升了复杂场景下的检测精度与效率。实验表明,系统在多类遥感目标检测中均达到行业领先水平,为地理信息产业数字化转型提供了关键技术支撑。未来工作将聚焦于轻量化部署、跨模态学习与时序分析,推动遥感影像智能化分析向更高层次发展。
参考文献
- 计算机毕业设计对标硕论YOLO遥感影像识别分析可视化系统
- 计算机毕业设计对标硕论YOLO遥感影像识别分析可视化系统
- 基于YOLO的遥感图像检测(论文+源码)
- YOLO算法与AI大模型的完美结合:开启智能应用开发新篇章
- 工程硕士学位论文 无人机三维立体重构与物体识别系统 研究与实现 YOLO 视觉 yolo
- yolov6实现遥感影像目标识别|以DIOR数据集为例
- 工业AI应用场景案例分析:整合计算机视觉技术YOLO和大模型deepseek实现产线操作员手部动作是否合规
运行截图
推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例









优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

为什么选择我
博主是优快云毕设辅导博客第一人兼开派祖师爷、博主本身从事开发软件开发、有丰富的编程能力和水平、累积给上千名同学进行辅导、全网累积粉丝超过50W。是优快云特邀作者、博客专家、新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交流和合作。
🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查↓↓↓↓↓↓获取联系方式↓↓↓↓↓↓↓↓


















 9644
9644

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











