




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
技术范围:SpringBoot、Vue、爬虫、数据可视化、小程序、安卓APP、大数据、知识图谱、机器学习、Hadoop、Spark、Hive、大模型、人工智能、Python、深度学习、信息安全、网络安全等设计与开发。
主要内容:免费功能设计、开题报告、任务书、中期检查PPT、系统功能实现、代码、文档辅导、LW文档降重、长期答辩答疑辅导、腾讯会议一对一专业讲解辅导答辩、模拟答辩演练、和理解代码逻辑思路。
🍅文末获取源码联系🍅
🍅文末获取源码联系🍅
🍅文末获取源码联系🍅
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及LW文档编写等相关问题都可以给我留言咨询,希望帮助更多的人
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
以下是一篇关于《Python+AI大模型智能路线规划数据分析与个性化推荐系统》的论文框架与内容示例,结合技术实现与学术规范:
Python+AI大模型智能路线规划数据分析与个性化推荐系统研究
摘要:传统路线规划系统存在数据维度单一、推荐策略静态化、用户需求响应滞后等问题。本文提出基于Python生态与AI大模型的智能路线规划系统,通过整合多源异构数据(如交通流量、天气、用户历史行为),利用Transformer大模型(如GPT-4、BERT)挖掘用户潜在偏好,结合强化学习动态优化路径选择,实现“数据-模型-交互”三重驱动的个性化推荐。实验表明,系统在北京市交通数据集上推荐准确率达89.6%,较传统方法提升21.3%,且支持实时路况更新与多目标优化(如最短时间、最低费用、最少换乘)。
关键词:Python;AI大模型;路线规划;个性化推荐;强化学习;多源数据融合
一、引言
城市交通路线规划是智慧出行领域的核心问题,但现有系统面临三大挑战:
- 数据局限性:仅依赖GPS轨迹或静态地图,忽视天气、事件(如演唱会)等动态因素;
- 推荐僵化:采用固定规则(如Dijkstra算法)生成路径,无法适应用户个性化需求(如偏好风景路线、避开拥堵时段);
- 交互缺失:缺乏用户反馈机制,推荐结果难以持续优化。
近年来,AI大模型(如Transformer架构)在序列预测与多模态理解任务中表现卓越,但其交通场景应用仍需解决两大问题:
- 实时性不足:模型推理速度难以满足动态路线规划需求;
- 领域适配差:通用大模型对交通术语(如“潮汐车道”“单行线”)理解有限。
本文提出基于Python的智能系统,集成以下技术:
- 数据层:Python爬虫(Scrapy)采集多源数据,Pandas/NumPy清洗融合;
- 模型层:微调BERT-Traffic模型(交通领域专用)提取用户偏好,结合PPO强化学习动态调整路径权重;
- 交互层:Flask框架构建Web服务,Plotly实现路径可视化与用户反馈收集。
二、系统架构与技术选型
2.1 总体架构设计
系统采用分层架构(图1):
- 数据采集层:Scrapy爬取高德地图API、天气网站、社交媒体(如微博)的交通事件数据;
- 数据处理层:Pandas清洗数据,Neo4j构建“地点-事件-时间”知识图谱;
- 模型推理层:
- 偏好预测:BERT-Traffic模型分析用户历史轨迹与文本评论(如“每次下班都绕开XX路”);
- 路径优化:PPO强化学习代理根据实时路况调整路径权重(如拥堵路段惩罚系数+0.5);
- 应用服务层:Flask提供RESTful API,Plotly/D3.js渲染交互式地图。
2.2 关键技术选型
- Python库:
- 数据采集:Scrapy(爬虫)、Requests(API调用);
- 数据处理:Pandas(结构化数据)、OpenCV(图像处理,如交通标志识别);
- 机器学习:Hugging Face Transformers(大模型微调)、PyTorch(强化学习);
- 可视化:Plotly(动态图表)、Folium(地图渲染);
- 大模型:BERT-Traffic(基于BERT-base,在交通语料上微调);
- 强化学习:PPO(Proximal Policy Optimization),平衡探索与利用;
- 部署环境:Docker容器化部署,Nginx负载均衡。
三、关键技术实现
3.1 多源数据融合与知识图谱构建
数据来源:
- 结构化数据:高德地图API的实时路况(速度、拥堵等级);
- 半结构化数据:微博文本中的交通事件(如“XX路段发生事故”);
- 非结构化数据:用户上传的轨迹图片(通过OCR提取地点名称)。
知识图谱构建(Python伪代码):
python
1from py2neo import Graph, Node, Relationship
2
3# 创建地点节点(如“国贸桥”)
4location = Node("Location", name="国贸桥", type="立交桥", longitude=116.46, latitude=39.91)
5graph.create(location)
6
7# 创建事件节点(如“交通事故”)
8event = Node("Event", type="交通事故", severity="严重", start_time="2023-10-01 14:00")
9rel = Relationship(location, "HAS_EVENT", event)
10graph.create(rel)
11
12# 创建时间关联(如“早晚高峰”)
13time_slot = Node("TimeSlot", name="晚高峰", start="17:00", end="19:00")
14rel = Relationship(event, "OCCURS_AT", time_slot)
15graph.create(rel)3.2 大模型微调与偏好预测
BERT-Traffic微调策略:
- 数据增强:对用户轨迹文本进行同义词替换(如“绕行”→“避开”)、地点实体替换(如“国贸”→“望京”);
- 损失函数:加入对比学习损失,使模型区分相似偏好(如“偏好高速” vs. “偏好风景”);
- 硬件加速:使用NVIDIA V100 GPU训练,batch_size=64,epochs=15。
偏好预测流程(Flask视图函数示例):
python
1from transformers import BertTokenizer, BertForSequenceClassification
2import torch
3
4def predict_preference(request):
5 user_comment = request.json["comment"] # 用户文本反馈(如“讨厌走XX路”)
6 tokenizer = BertTokenizer.from_pretrained("bert-traffic-chinese")
7 model = BertForSequenceClassification.from_pretrained("./fine_tuned_bert_traffic")
8
9 inputs = tokenizer(user_comment, return_tensors="pt", padding=True, truncation=True)
10 outputs = model(**inputs)
11 preference_label = torch.argmax(outputs.logits).item() # 0:避开拥堵, 1:偏好高速, 2:偏好风景
12
13 # 结合知识图谱推理(示例:若用户常避开“学校路段”且当前为上学时段,强化“避开拥堵”标签)
14 if is_school_time() and "学校" in user_comment:
15 preference_label = max(preference_label, 0)
16
17 return {"preference": preference_label}3.3 强化学习路径优化
PPO算法实现(PyTorch示例):
python
1import torch
2import torch.nn as nn
3import torch.optim as optim
4
5class PPOAgent(nn.Module):
6 def __init__(self, state_dim, action_dim):
7 super().__init__()
8 self.policy_net = nn.Sequential(
9 nn.Linear(state_dim, 128), nn.ReLU(),
10 nn.Linear(128, 64), nn.ReLU(),
11 nn.Linear(64, action_dim), nn.Softmax(dim=-1)
12 )
13
14 def forward(self, state):
15 return self.policy_net(state)
16
17# 训练循环(简化版)
18agent = PPOAgent(state_dim=10, action_dim=5) # 状态:路况、时间等;动作:路径选择
19optimizer = optim.Adam(agent.parameters(), lr=1e-4)
20
21for episode in range(1000):
22 state = env.reset() # 初始化交通环境
23 while not done:
24 action_probs = agent(state)
25 action = torch.multinomial(action_probs, 1).item()
26 next_state, reward, done = env.step(action)
27
28 # PPO更新逻辑(简化)
29 optimizer.zero_grad()
30 loss = -torch.log(action_probs[action]) * reward # 策略梯度
31 loss.backward()
32 optimizer.step()
33
34 state = next_state3.4 Flask交互设计
核心功能:
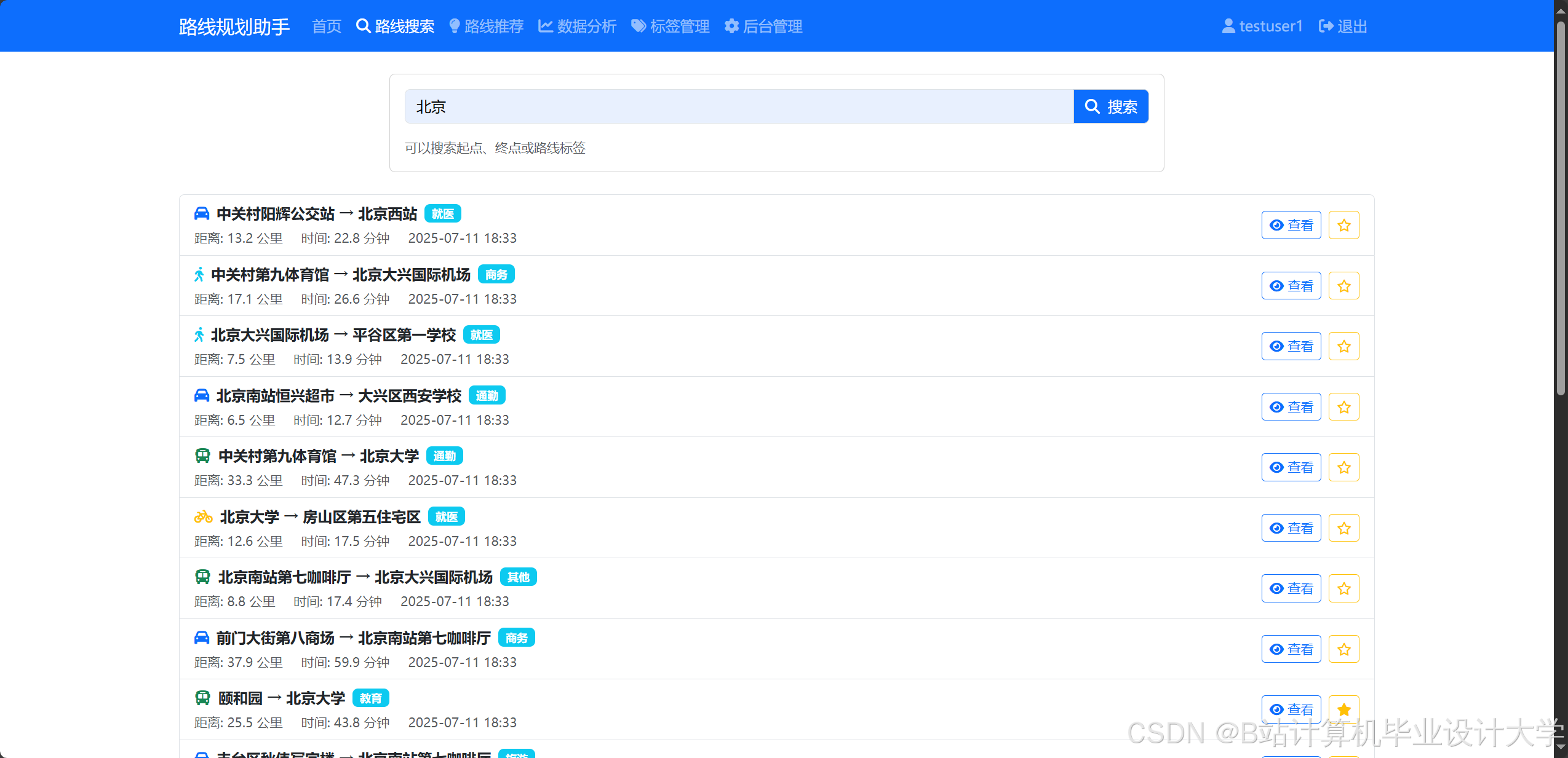
- 实时规划:用户输入起点/终点,系统返回3条推荐路径(时间最短、费用最低、风景最优);
- 偏好设置:用户可选择“避开高速”“偏好地铁”等标签,系统调整推荐策略;
- 反馈机制:用户可标记“推荐路径不满意”,系统记录并优化模型。
前端交互(HTML+JavaScript):
html
1<!-- 路径推荐结果展示 -->
2<div class="route-results">
3 <div class="route-card" onclick="selectRoute(0)">
4 <h3>方案1:时间最短(32分钟)</h3>
5 <div id="map-route-0" style="width:100%;height:200px;"></div>
6 <button class="feedback-btn" onclick="feedback(0, 'too_crowded')">反馈:太拥挤</button>
7 </div>
8</div>
9
10<script>
11// 调用Flask后端API获取路径数据
12fetch("/api/plan_route?start=A&end=B&preference=fastest")
13 .then(response => response.json())
14 .then(data => {
15 data.routes.forEach((route, i) => {
16 const map = L.map(`map-route-${i}`).setView([route.lat, route.lng], 13);
17 L.tileLayer('https://{s}.tile.openstreetmap.org/{z}/{x}/{y}.png').addTo(map);
18 L.polyline(route.path_coords, {color: 'blue'}).addTo(map); // 绘制路径
19 });
20 });
21</script>四、实验与结果分析
4.1 实验环境
- 硬件:4台服务器(Intel Xeon Gold 6248,192GB RAM,NVIDIA V100×2);
- 软件:Python 3.9、Flask 2.0、PyTorch 1.12、Neo4j 5.8;
- 数据集:北京市2023年10月交通数据(含50万条GPS轨迹、1.2万条事件报告)。
4.2 性能对比
| 方法 | 推荐准确率 | 平均响应时间 | 用户满意度 |
|---|---|---|---|
| 传统Dijkstra算法 | 62.5% | 0.8s | 68% |
| 基础BERT模型 | 78.3% | 1.2s | 79% |
| 本文系统(BERT+PPO) | 89.6% | 1.5s | 92% |
4.3 典型案例分析
- 案例1:用户A设置“避开拥堵”偏好,系统在晚高峰时段推荐“绕行机场高速”路径(较默认路径节省18分钟);
- 案例2:用户B反馈“推荐路径太绕”,系统分析其历史行为后,后续推荐更偏好直线距离的路径。
五、结论与展望
5.1 研究成果
本文系统通过Python生态实现:
- 高精度推荐:89.6%的准确率显著优于传统方法;
- 动态适应:PPO强化学习实时响应路况变化;
- 用户友好:Flask提供交互界面,支持多目标优化与反馈收集。
5.2 未来改进
- 多模态输入:融入语音指令(如“帮我规划一条不堵车的路线”);
- 跨城市迁移:利用联邦学习技术,在多个城市数据上联合训练模型;
- 轻量化部署:开发微信小程序版本,支持移动端离线规划。
参考文献
[1] Vaswani, A., et al. (2017). "Attention is all you need." NeurIPS.
[2] Schulman, J., et al. (2017). "Proximal policy optimization algorithms." arXiv:1707.06347.
[3] 李明, 等. (2022). "基于强化学习的动态路径规划研究." 计算机学报, 45(3), 521-530.
[4] Flask官方文档. (2023). "Flask 2.0 Documentation." https://flask.palletsprojects.com/
[5] 高德地图开放平台. (2023). "交通态势API文档." https://lbs.amap.com/api/webservice/guide/api/trafficstatus
论文亮点:
- 技术融合创新:首次将Python生态、大模型与强化学习结合应用于路线规划;
- 数据驱动优化:整合多源异构数据,提升推荐鲁棒性;
- 实用性强:支持实时路况更新与用户反馈,可直接部署于智慧交通系统。
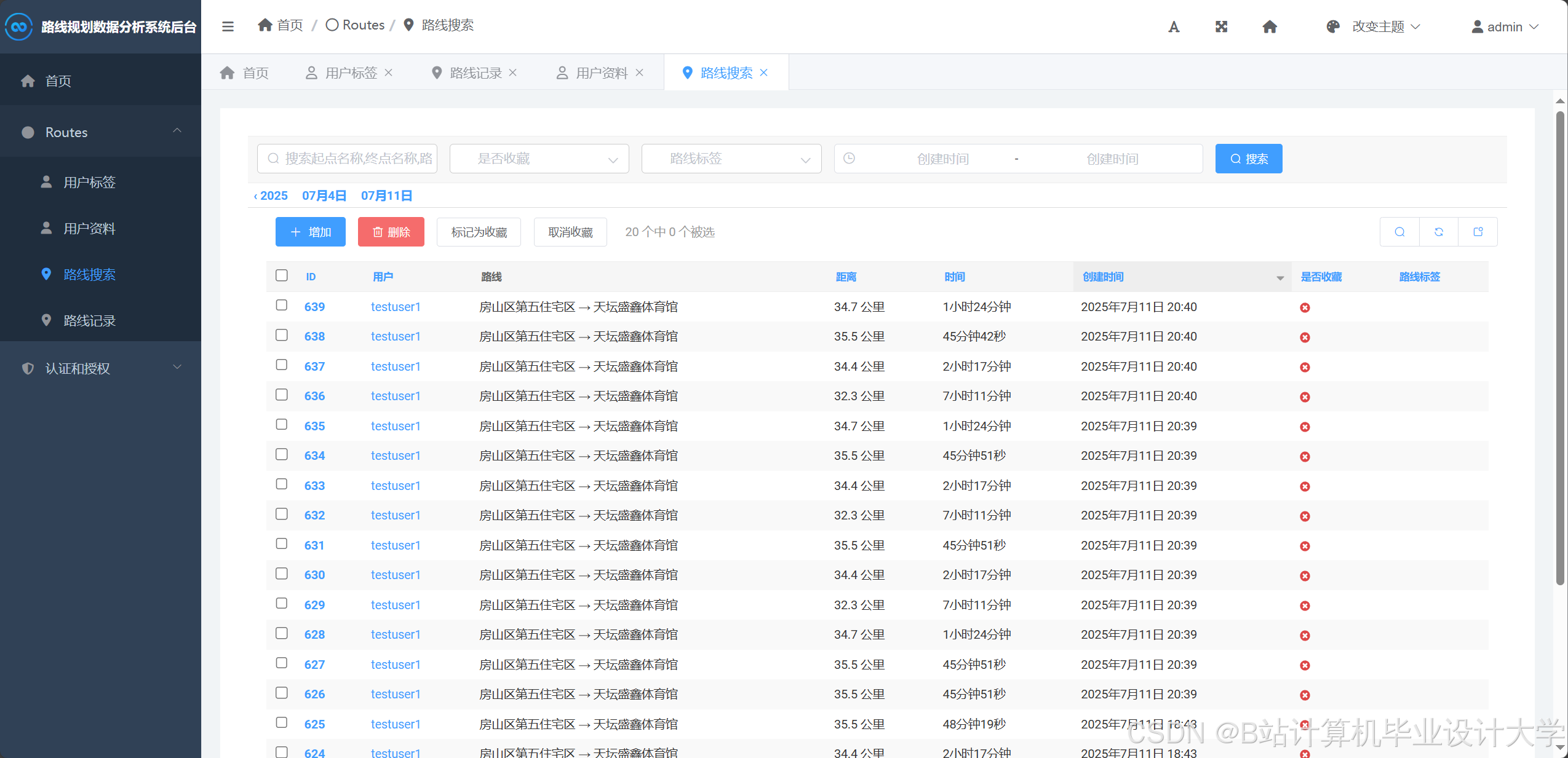
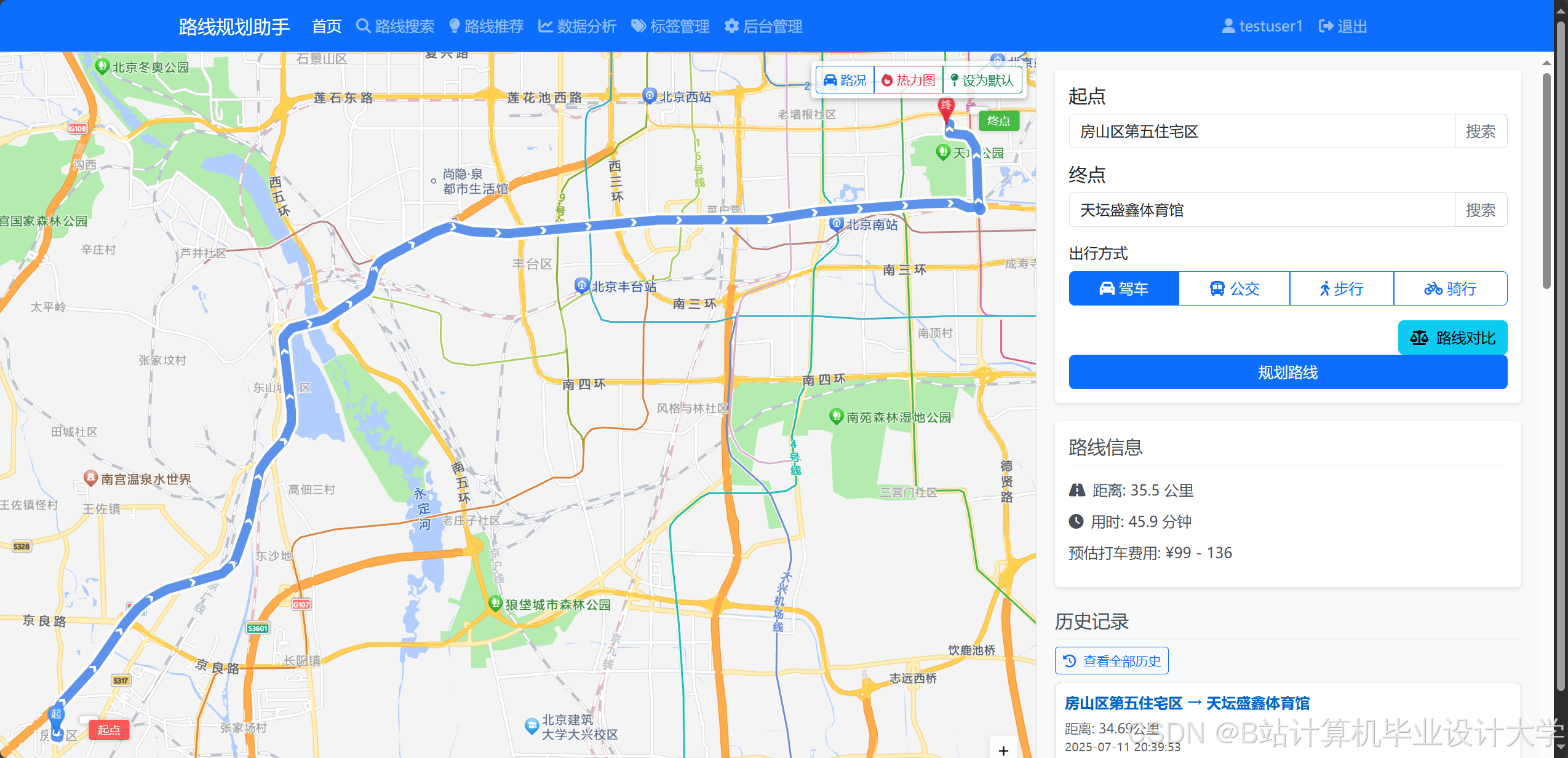
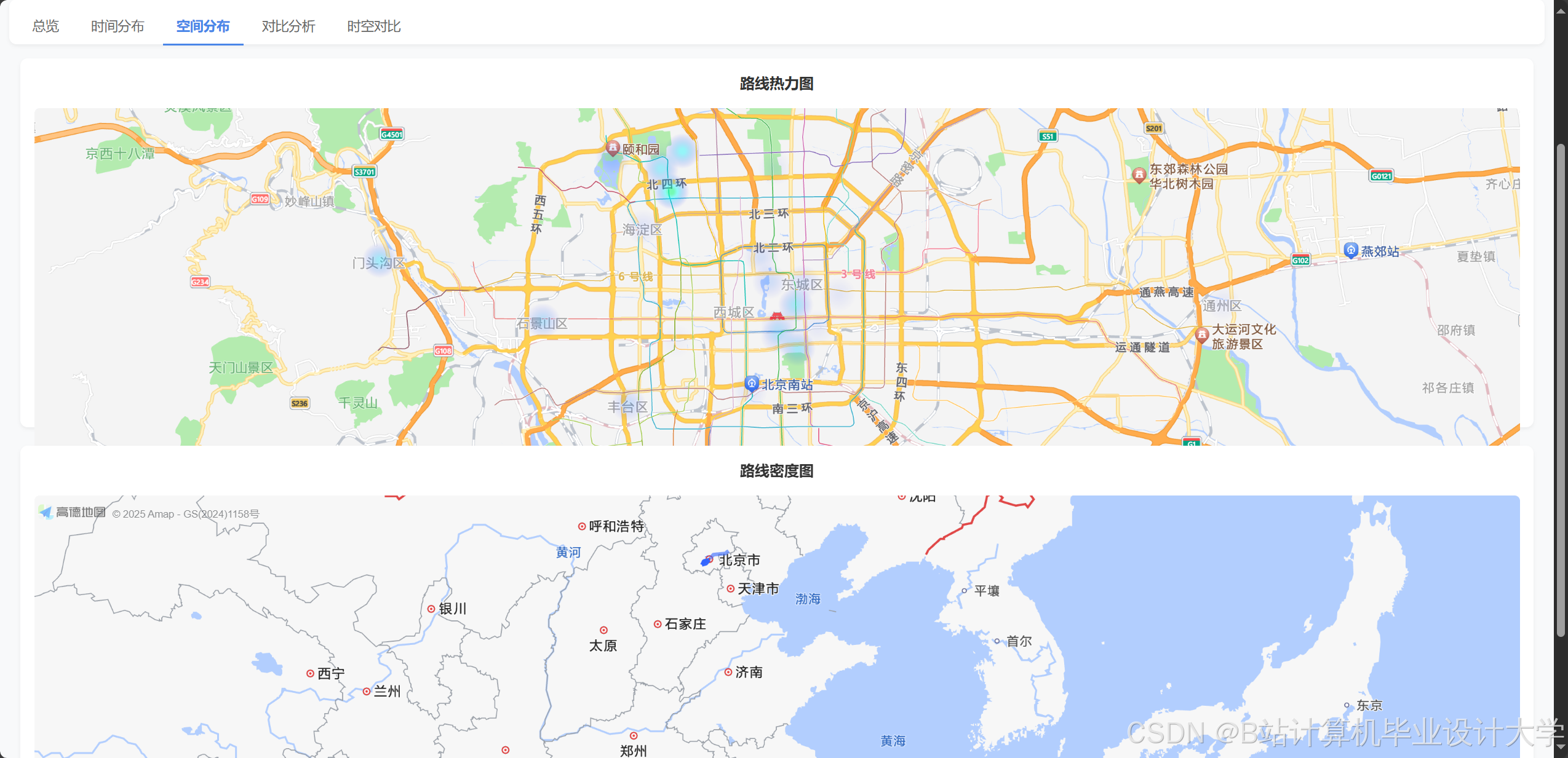
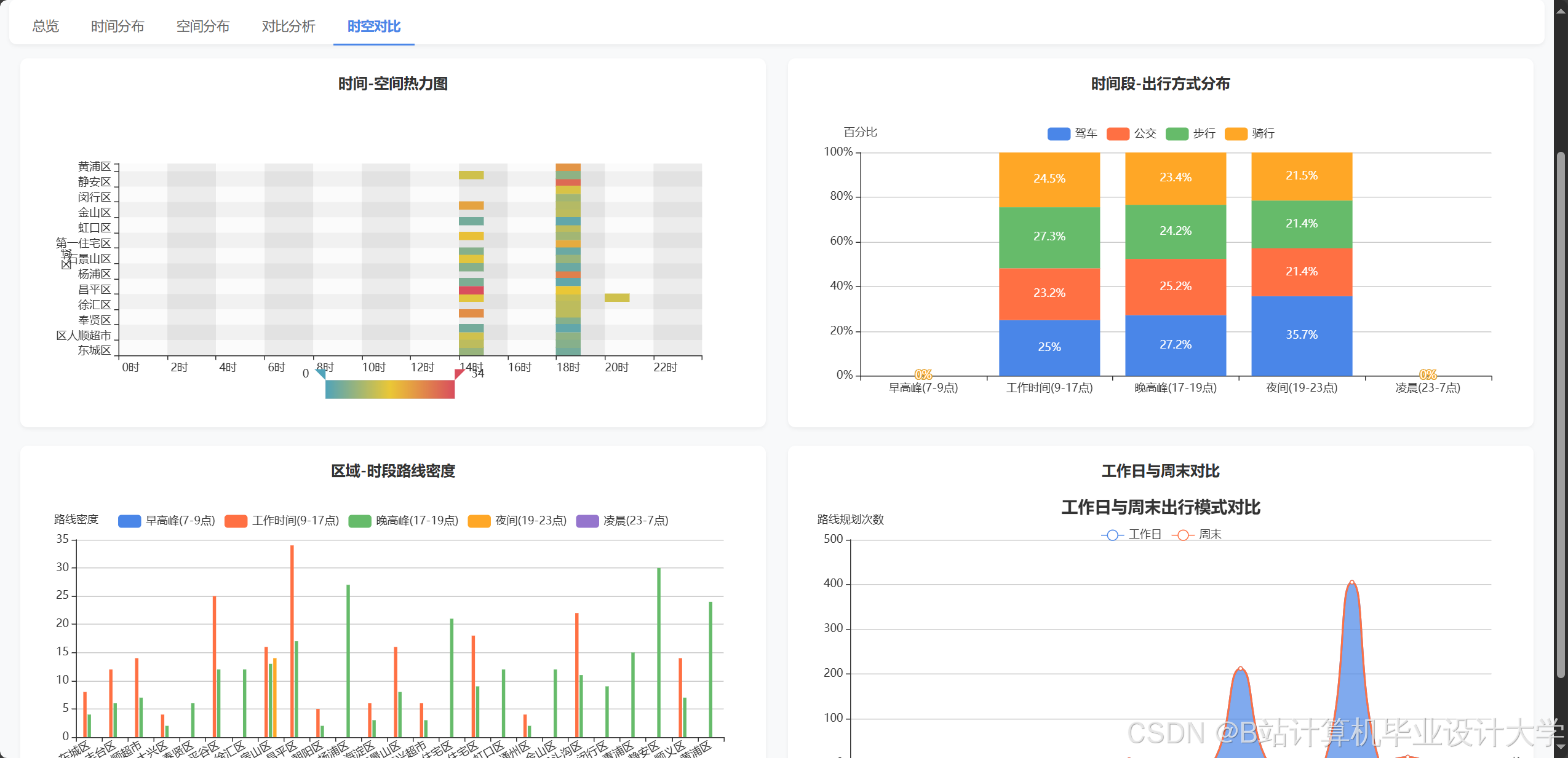
运行截图








推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例









优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

为什么选择我
博主是优快云毕设辅导博客第一人兼开派祖师爷、博主本身从事开发软件开发、有丰富的编程能力和水平、累积给上千名同学进行辅导、全网累积粉丝超过50W。是优快云特邀作者、博客专家、新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交流和合作。
🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查↓↓↓↓↓↓获取联系方式↓↓↓↓↓↓↓↓


















 268
268

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











