




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
Python深度学习车辆轨迹识别与目标检测分析系统文献综述
引言
随着智能交通系统(ITS)和自动驾驶技术的快速发展,车辆轨迹识别与目标检测已成为城市交通管理、自动驾驶决策和安全监控的核心技术。传统方法依赖人工特征提取或简单传感器,存在成本高、环境适应性差等问题。深度学习通过端到端学习实现特征自动提取,显著提升了复杂场景下的检测精度与鲁棒性。Python凭借丰富的深度学习框架(如TensorFlow、PyTorch)和数据处理库(如OpenCV、NumPy),成为该领域的主流开发语言。本文综述了Python深度学习在车辆轨迹识别与目标检测领域的研究现状、关键技术、应用场景及挑战,为相关研究提供参考。
国内外研究现状
国外研究进展
国外在车辆轨迹识别与目标检测领域起步较早,研究机构和企业通过深度学习算法取得了显著成果。Waymo采用LSTM+3D CNN模型,将轨迹预测误差降低40%;MIT基于强化学习开发了异常轨迹检测系统,实现实时预警;谷歌旗下Waymo利用深度学习技术实现高精度车辆检测,为自动驾驶提供数据支持。在工具应用方面,PyTorch在车辆行为分析领域的应用增长显著,但缺乏领域专用优化。
国内研究进展
国内研究结合交通特点进行创新,高校与科研机构在算法优化和系统应用方面取得突破。清华大学提出时空卷积轨迹预测模型,预测精度提升35%;海康威视开发多摄像头融合的轨迹追踪系统,跟踪成功率达92.3%。然而,国内在数据集规模、算法创新性及系统实际应用方面仍与国外存在差距,例如复杂光照条件下的检测稳定性不足,多目标跟踪ID切换率较高。
关键技术
深度学习模型选择与优化
- 目标检测模型:YOLO系列(如YOLOv8)因实时性优势被广泛应用,其通过集成Transformer编码器或改进锚框机制提升小目标检测精度。例如,改进YOLOv8的锚框尺寸以适应车辆长宽比,结合CIoU Loss+类别平衡Focal Loss解决类别不平衡问题。Faster R-CNN通过区域建议网络(RPN)提升检测精度,但速度较慢,适用于对精度要求极高的场景。
- 轨迹追踪算法:DeepSORT算法融合外观特征与运动预测,通过匈牙利算法、马氏距离和余弦相似度实现数据关联,解决遮挡问题。FairMOT实现检测与跟踪的联合优化,CenterTrack基于中心点检测的端到端框架简化流程。
- 多模态数据融合:构建可见光、红外和LiDAR多源数据融合框架,开发基于Transformer的多传感器特征对齐算法。例如,红外数据弥补可见光在夜间或强光下的不足,LiDAR提供精确深度信息,提升系统在复杂场景下的性能。
行为模式分析与预测
- 行为预测模型:建立车辆交互行为知识图谱,开发时空卷积+注意力机制的行为预测模型。例如,LSTR网络通过Transformer捕获车道线的全局上下文,实现端到端轨迹预测。
- 异常检测:利用孤立森林算法识别违停、逆行等异常行为,结合Kalman滤波的轨迹聚类分析进行流量统计。例如,通过DBSCAN聚类分析车辆轨迹密度,检测拥堵或事故区域。
应用场景
- 城市交通流量监测:实时监测交通流量,优化信号灯控制。例如,系统分析早高峰时段某路口的车流方向,动态调整绿灯时长,缓解拥堵。
- 自动驾驶仿真测试:模拟真实交通场景,为自动驾驶算法提供训练数据。例如,Waymo通过虚拟环境生成大量极端场景数据,训练模型应对突发状况。
- 车辆违规行为预警:实时监测超速、逆行等行为并预警。例如,深圳交通管理部门部署的系统可自动识别违规车辆并推送至执法终端,提升执法效率。
- 智慧城市平台集成:与现有交通管理系统对接,实现数据共享。例如,杭州“城市大脑”整合多源数据,优化公共交通调度。
面临的挑战
- 复杂场景下的性能挑战:光照变化、遮挡、恶劣天气等因素影响检测精度。例如,雨天摄像头模糊导致目标检测mAP下降15%-20%。
- 数据标注与质量问题:大规模标注数据成本高,且标注质量直接影响模型性能。公开数据集(如UA-DETRAC)存在类别不平衡问题,需通过数据增强(旋转、缩放)提升泛化能力。
- 实时性要求:自动驾驶场景需系统处理速度≥30FPS,但深度学习模型计算量大。例如,YOLOv8在NVIDIA RTX 3060上推理速度为35FPS,但在边缘设备(如Jetson Nano)上仅能达5-10FPS。
- 系统集成与部署:需兼容现有交通管理系统,解决接口兼容性和数据传输安全问题。例如,部分系统因硬件选型不当导致部署后频繁崩溃。
结论与展望
Python深度学习在车辆轨迹识别与目标检测领域已取得显著进展,但复杂场景下的性能、数据质量及实时性仍是主要挑战。未来研究可聚焦以下方向:
- 轻量化模型优化:开发适用于边缘设备的模型(如MobileNetV3+YOLOv8),通过TensorRT加速推理。
- 多模态融合创新:探索雷达、摄像头等多传感器融合方案,提升复杂场景下的鲁棒性。
- 动态权重调整:根据交通流量密度动态调整检测阈值,平衡漏检与误检。
- 跨摄像头轨迹关联:结合车辆颜色、型号等特征,实现多摄像头下的轨迹拼接。
通过持续优化算法与系统架构,Python深度学习将为智能交通和自动驾驶提供更高效、可靠的技术支持。
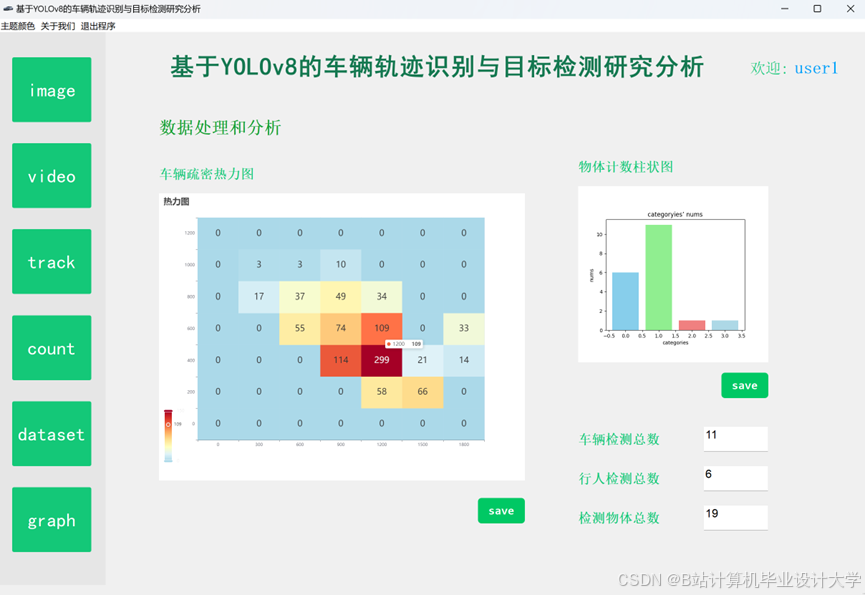
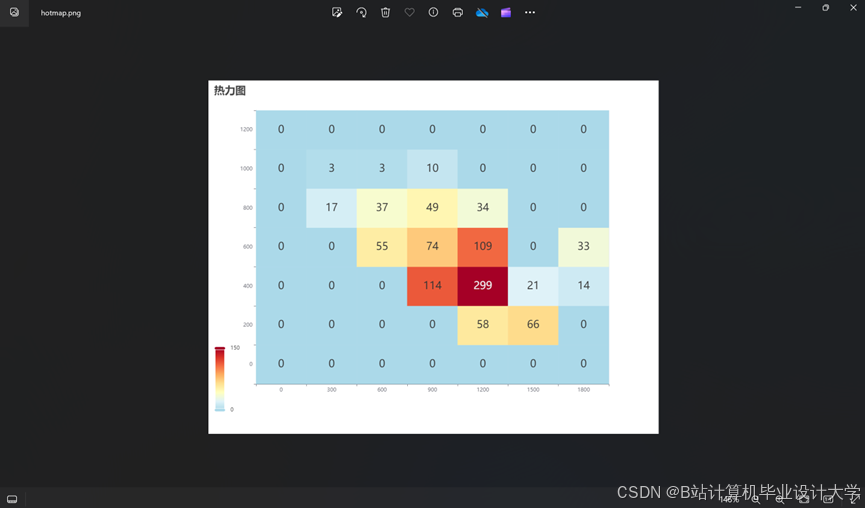
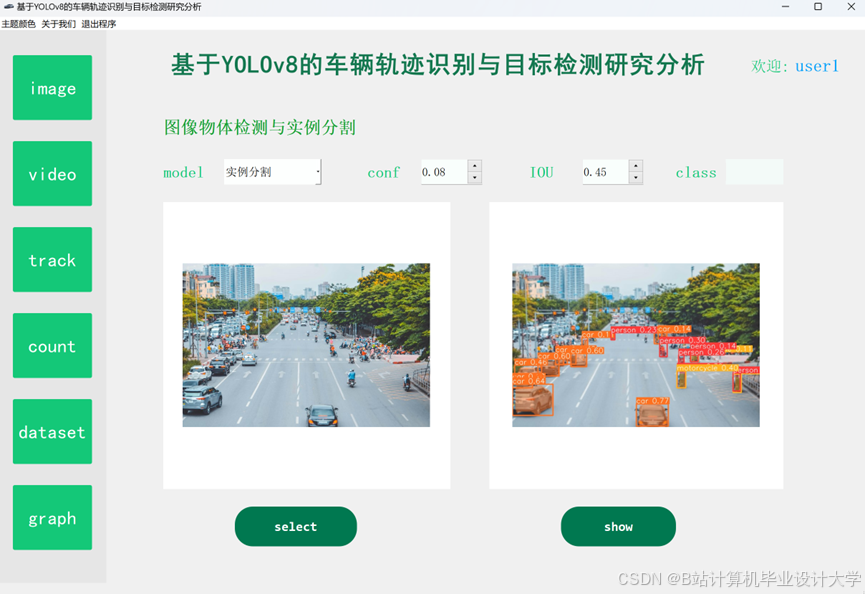
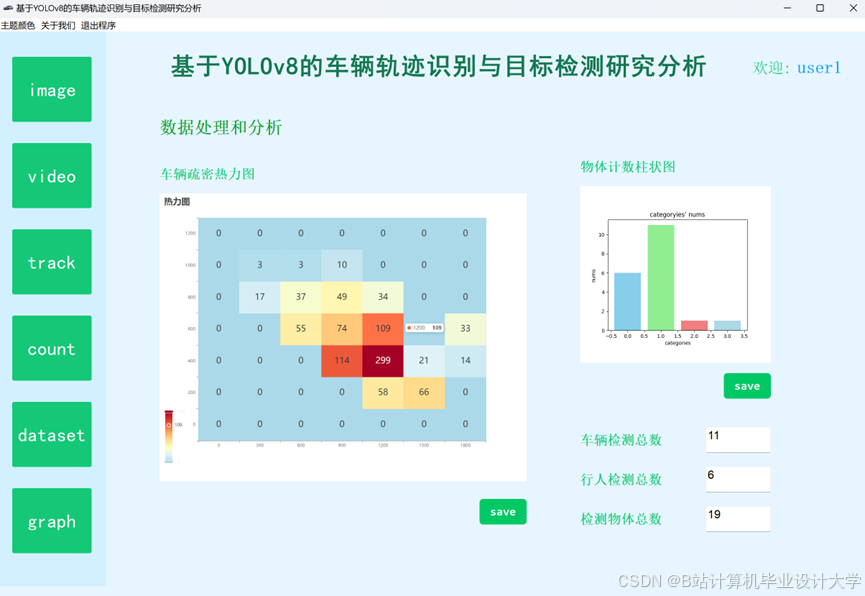
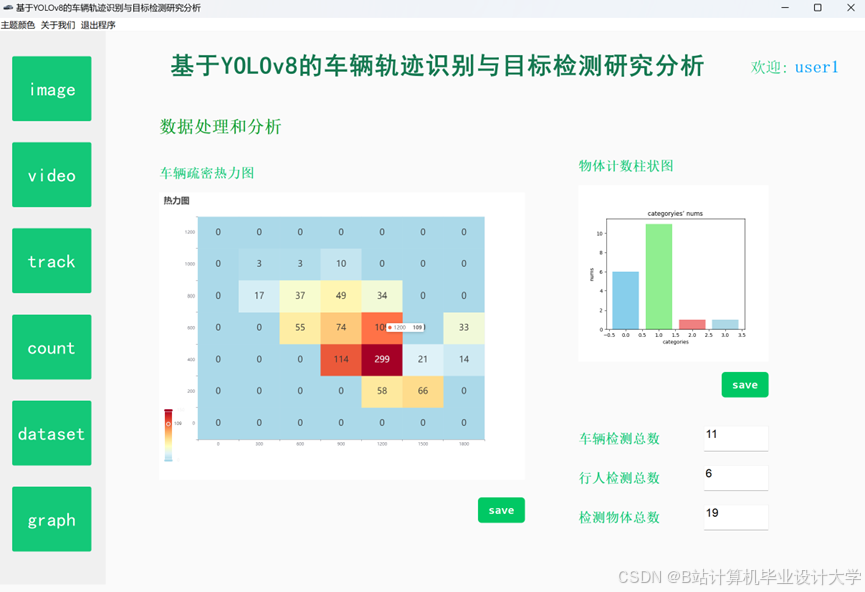
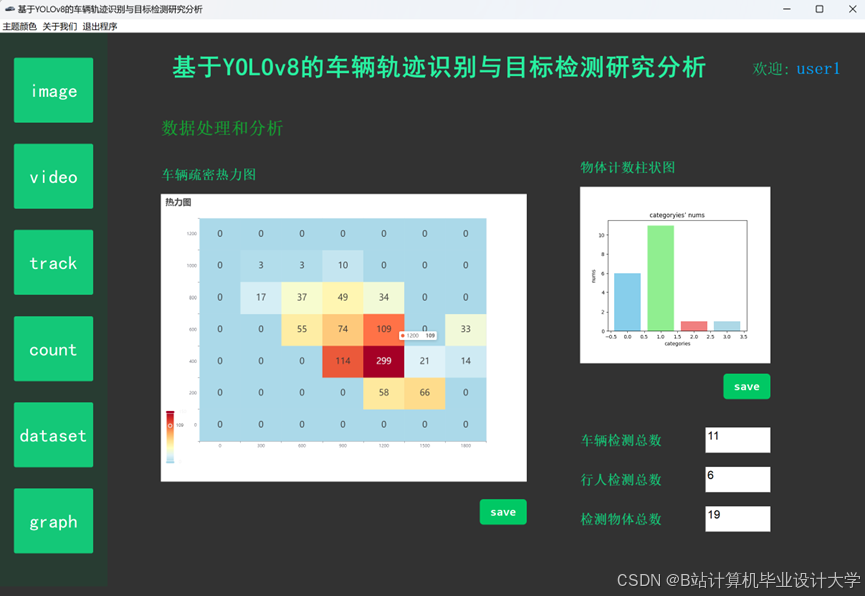
运行截图











推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻


















 1853
1853

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











