




5.1 瞰景Smart3D提交空三
导入POS后,在空三任务右键,选择创建空三任务,创建一个新的空三任务,输入空三任务名称。参照相机中选择勾选下视相机作为参照相机。
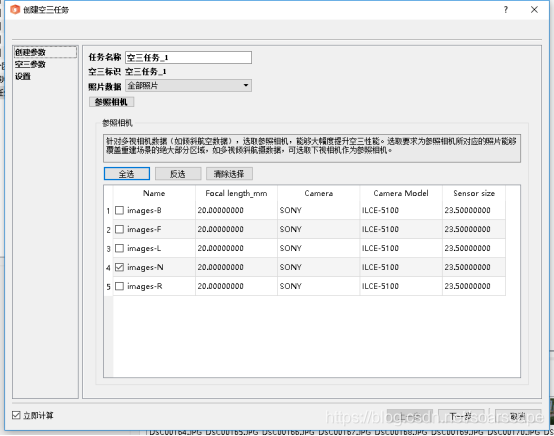
照相机
这是新增的空三算法,不选择的话按一般空三算法计算。选择后,能大幅度提升空三性能,选择时需要指定一个能覆盖所有测区的参照相机,如果是多视倾斜航摄数据,可选择下视相机作为参照相机。
在提交空三运算时,软件默认的设置已足够处理大部分影像数据。在第一遍提交时,建议按默认设置提交即可。以下是相关的空三设置参数。
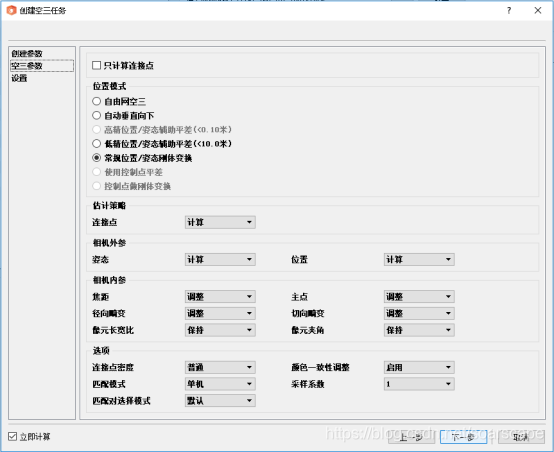
只计算连接点
空三运算时,只有连接点参与解算,做自由网空三运算,控制点不参与平差解算。
位置模式
自由网空三:无定位信息情况下,区块的位置和方向无任何限制
自动垂直向下:区块的垂直朝向由参与运算的影像的综合垂直方向决定。这个选项对于处理航空摄影时定位信息不准时使用。
高精位置/姿态辅助平差(<0.10米):在GNSS/POS定位精度高的情况下使用,使用GNSS/POS参与平差需要保证每张影像都具有精确的位置信息,且误差<0.1米
低精位置/姿态辅助平差(<10.0米):在GNSS/POS定位精度略低的情况下使用,定位误差需满足<10米
常规位置/姿态刚体变换:利用影像GNSS/POS数据对区块定位进行调整,对定位精度无太高要求。
使用控制点平差:控制点参与平差,对区块进行精确定位。
控制点做刚体变换:参考控制点对区块进行刚性配准,不做几何变形的纠正,在控制点不精确时使用(一般不使用)。
相机外参、内参计算方式
o计算:所有参数重新计算;
o调整:以输入的值作为初值进行计算;
o保持:以输入的值参作为精确值,不再进行计算。
连接点密度
调整空三匹配时提取的连接点密度
普通:适用于大部分数据,默认选项。
高:适用于匹配对象纹理较弱或影像较小的数据,增加连接点匹配数量,同时会增加空中三角测量计算的时间。
颜色一致性调整
o启用:软件对所有影像进行自动匀光匀色。
o禁用:软件不对影像进行自动匀光匀色。
匹配模式
单机:适用于只有单台计算机进行空三处理的时候。在启用单机计算时,Feature Match步骤不再拆分为多个步骤,表现为空三处理进度的51%-90%过程为一个完整过程。(即当Feature Match步骤完成时,进度将从51%直接变为90%)。由于步骤无需拆分,运算时间比使用集群设置时有所减少。
集群: 适用于多台计算机并行处理空三任务时。在计算过程中,软件自动将空三步骤拆分为多个子步骤,交由多台计算机同时处理。
采样系数
主要用于单镜头照片快拼的生成。采样系数越高,提取的连接点越少,影像分辨率越低。
匹配对选择模式
o默认:适用于大部分数据,默认选项。
o加强:若影像多为弱纹理、无纹理区域,空三后出现丢片较多的情况,建议选择加强的匹配对选择模式。
选择好空三设置后点击完成。若勾选立即计算,点完成后将直接进行计算,若不勾选,点完成后不会进行计算,需再点击一次提交计算软件才开始计算。
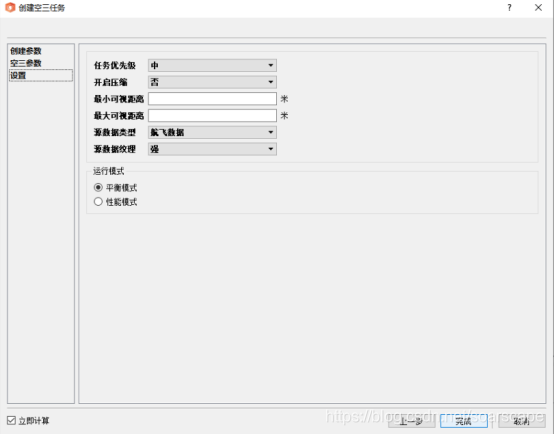
任务优先级
任务优先级分为低、中、高三种级别,级别越高则引擎越优先处理。
最小/最大可视距离
可设置一个粗略估计的视距。
如果不知道确切的视距值,可以设置合理边界(相应减小最小视距增大最大视距)或者忽略不填写。
如果影像位置是已知的,
五、瞰景Smart3D空三解算
最新推荐文章于 2024-07-06 19:15:27 发布
 本文介绍瞰景Smart3D空三处理流程,包括空三任务设置、空三成果导出与导入、控制点添加及多个工程控制点合并等关键步骤。适合初学者快速掌握空三技术。
本文介绍瞰景Smart3D空三处理流程,包括空三任务设置、空三成果导出与导入、控制点添加及多个工程控制点合并等关键步骤。适合初学者快速掌握空三技术。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 3万+
3万+






 到【灌水乐园】发言
到【灌水乐园】发言









