




 文章讲述了用户张小白购买并体验香橙派AIPro边缘计算产品,包括其硬件配置、软件安装、网络连接、内存管理以及初步的模型推理。着重提到散热问题对后续应用的影响。
文章讲述了用户张小白购买并体验香橙派AIPro边缘计算产品,包括其硬件配置、软件安装、网络连接、内存管理以及初步的模型推理。着重提到散热问题对后续应用的影响。
香橙派AI Pro是香橙派厂家跟华为昇腾合作的新一代边缘计算产品:
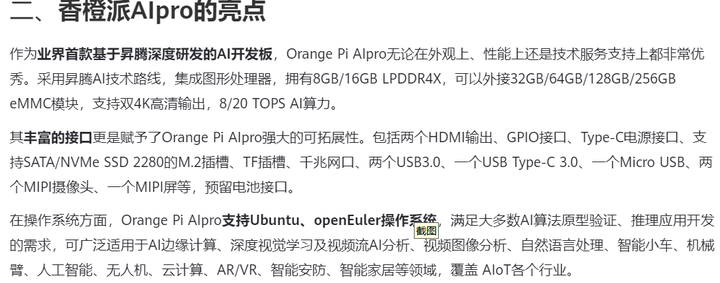
现在推出的产品仅支持8TOPS算力,有8G和16G的两种版本,鉴于张小白在使用Atlas 200DK和Atlas 200I DK A2上的经验和教训,决定购买16G的版本。

经过两个月漫长的等待,张小白预定的香橙派AI Pro终于到货了:

打开包装盒,可以看到内置一个塑封的电路板:
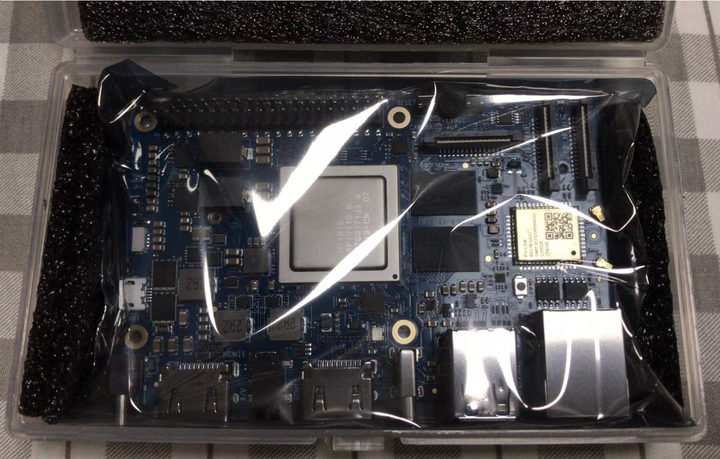
左右上三个方向还有黑色的海绵支撑,确保电路板不会被压坏。厂商确实用了点心。

拆开塑封:

一个带天线的电路板映入眼帘。天线包含两个头,一个头写的是2.4G,一个头写的是2.4/5.8G。
最上面是40PIN的排针(GPIO),右上角左边是MIPI摄像头接口(Camera0),右边是MIPI显示屏接口(Display)。上面两个圆点,一
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2965
2965

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











