






输出比较实验:RGB彩灯通过变化PWM占空比实现呼吸灯效果
RGB彩灯原理图

1.2 模块概述
RGB LED 模块通过 R、 G、 B 三个引脚的 PWM 电压输入可以调节三种基色(红/蓝/绿)的强度从而实现全
彩的混色效果。
应用领域
►七彩灯
1.3 接口说明
管脚编号 名称 功能
1 GND 电源地
2 R 红灯
3 G 绿灯
4 B 蓝灯
1.4接线原理图
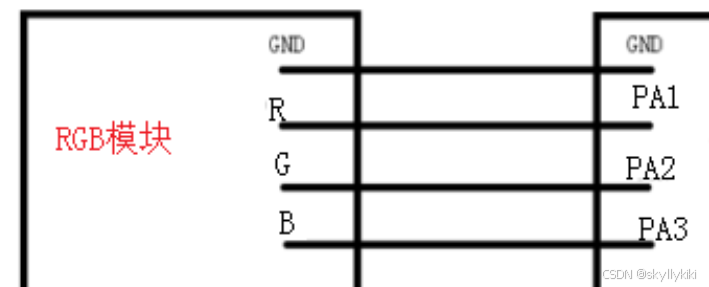
这里的原理图有误,需要将GND接到开发板3.3V的位置灯才能亮
根据原理图我们需要接三个PWM通道
代码编写及思路
查数据手册资料
1.根据数据手册,找到PA1/PA2/PA3引脚对应的定时器通道
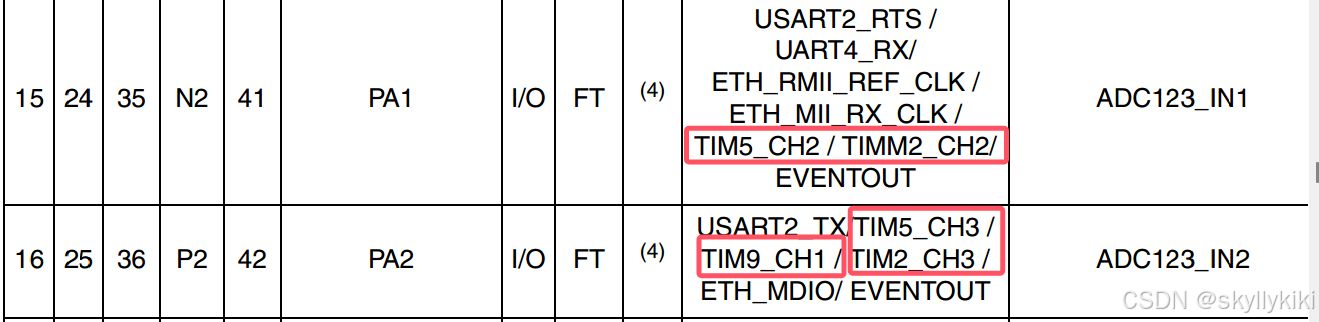

这些IO口复用到对应的定时器通道都可以供我们选择
我选择的是TIM2_CH2/3/4通道
编写代码
代码思路请参考我的前面的文章:基于STM32F407系列开发板通用定时器输入捕获和输出比较功能
RGB初始化函数:
#include "rgb.h"
void rgb_Config(void)
{
//打开PA1/2/3 TIM2时钟
RCC->AHB1ENR |= (1<<0);//打开PA时钟
RCC->APB1ENR |= (1<<0);//打开TIM2时钟
//配置PA1/2/3端口为复用推挽输出
GPIOA->MODER &= ~(0x3f<<2);
GPIOA->MODER |= (0x2a<<2);//PCA1/2/3配置为复用模式
GPIOA->OTYPER &= ~(7<<1);//第1/2/3引脚设置为推挽输出
GPIOA->AFR[0] &= ~(0xfff<<4);
GPIOA->AFR[0] |= (0x111<<4);//TIM2映射到GPIOA123端口
//配置TIM2寄存器
TIM2->CR1 &= ~(15<<1);//关闭更新禁止使能, 禁止单脉冲模式,计数递增模式,不使用中断
TIM2->CR1 &= ~(1<<7);//arr寄存器不缓冲自动重装载
TIM2->SMCR &= ~(7<<0);//禁止从模式
TIM2->EGR |= (1<<0);//UG位置1
//配置CCMR1/2寄存器位
TIM2->CCMR1 &= ~(3<<8);//通道2配置为输出模式
TIM2->CCMR2 &= ~(3<<0);//通道3配置为输出模式
TIM2->CCMR2 &= ~(3<<8);//通道4配置为输出模式
TIM2->CCMR1 |= (6<<12);//通道2选择PWM1模式
TIM2->CCMR2 |= (6<<4) ;//通道3选择PWM1模式
TIM2->CCMR2 |= (6<<12);//通道4选择PWM1模式
TIM2->CCER |= (3<<4);//低电平为有效电平并使能通道2引脚输出信号
TIM2->CCER |= (3<<8);//低电平为有效电平并使能通道3引脚输出信号
TIM2->CCER |= (3<<12);//低电平为有效电平并使能通道4引脚输出信号
TIM2->CNT = 0;
TIM2->PSC = 83;//84分频
TIM2->ARR = 999;//重装载值是1000,这样每个计数周期是1ms
TIM2->CR1 |= (1<<0);//打开计数使能
}
主函数通过修改CCRx的值控制占空比实现呼吸灯功能
#include "main.h"
u32 i1,i2,i3;//全局变量i控制灯的占空比
int main()
{
rgb_Config();
while(1)
{
for(i1=0;i1<500;i1++)
{
TIM2->CCR2 = i1;
delay_ms(5);
}
for(i2=0;i2<500;i2++)
{
TIM2->CCR3 = i2;
delay_ms(5);
}
for(i3=0;i3<500;i3++)
{
TIM2->CCR4 = i3;
delay_ms(5);
}
}
}
输入捕获实验1:按键时长捕获
通过按键触发捕获按键按下的时长,实际上需要记录按键从按下到松开计数次数即可。
#include "keytime.h"
void key_time_Config(u32 psc,u32 arr)
{
RCC->AHB1ENR |=(1<<0);//打开PA时钟
RCC->APB1ENR |=(1<<3);//TIM5时钟
GPIOA->MODER &=~(3<<0);
GPIOA->MODER |=(2<<0);//复用
GPIOA->OTYPER &=~(1<<0);
GPIOA->AFR[0] &=~(0xf<<0);
GPIOA->AFR[0] |=(2<<0);
TIM5->CR1 &=~(0xf<<1);
TIM5->CR1 &=~(1<<7);//arr无缓冲
TIM5->CR1 |=(2<<8);//CKD滤波分频 4分频
TIM5->SMCR &=~(7<<0);//禁止从模式 选择内部时钟
TIM5->DIER |=(1<<0);//周期中断使能
TIM5->DIER |=(1<<1);//通道1中断使能
//CH1
TIM5->CCMR1 |=(1<<0);//通道配置为输入
TIM5->CCMR1 |=(0xf<<4);//输入滤波 82KHz
TIM5->CCER |=(1<<0);//使能捕获
TIM5->CCER |=(1<<1);
TIM5->CCER |=(1<<3);//双边沿触发
TIM5->CNT=0;
TIM5->PSC=psc-1;
TIM5->ARR=arr-1;
TIM5->CR1 |=(1<<0);//使能
NVIC_SetPriority(TIM5_IRQn,4);//占先=1 次级=0
NVIC_EnableIRQ(TIM5_IRQn);
}
//编写中断服务函数
void TIM5_IRQHandler(void)
{
static u32 start_ccr=0;
static u32 keytime=0;
static u32 count=0;
static u8 flag=0;
if(TIM5->SR & (1<<0))//周期中断
{
TIM5->SR &=~(1<<0);
if(flag)
{
count++;//按键按下开始计算进周期中断次数
}
}
if(TIM5->SR & (1<<1))//通道中断
{
TIM5->SR &=~(1<<1);
if(GPIOA->IDR & (1<<0))//上升沿
{
start_ccr=TIM5->CCR1;
flag=1;//按键按下修改标志位
}
else//下降沿
{
keytime=(count*10000+TIM5->CCR1-start_ccr)*1;
keytime/=1000;
if(keytime>30)//判断按键按下的时长+消抖
{
printf("kt_time=%dms\r\n",keytime);
}
start_ccr=0;//松手后将所有静态变量清零
keytime=0;
count=0;
flag=0;
}
}
}
输入捕获实验2:超声波测距
根据超声波器件资料手册
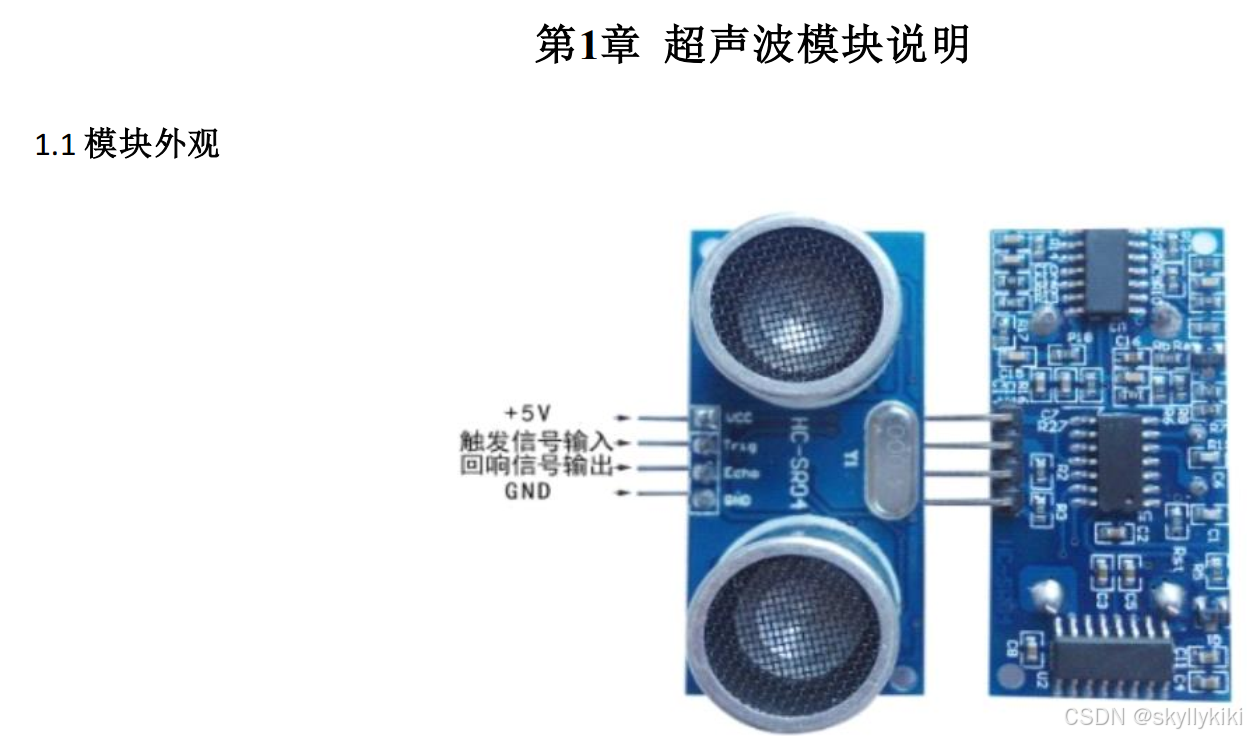
1.2 模块概述
HC-SR04 超声波测距模块可提供 2cm-400cm 的非接触式距离感测功能,测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路。
1.2.1 工作原理
1.采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信呈。
2.模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
3.有信号返回, 通过 IO 口 ECHO 输出一个高电平, 高电平持续的时间就是超声波从发射到返回的时间。
测试距离=(高电平时间*声速(340M/S))/2 。
4.测距离公式: uS/58=厘米或者 uS/148=英寸; 或是: 距离=高电平时间*声速(340M/S) /2; 建议测量周期为 60ms 以上, 以防止发射信号对回响信号的影响
应用领域
►小车测距
1.3 接口说明
管脚编号 名称 功能
1 VCC 外接 —5v 电压
2 TRIG —触发控制信号输入
3 ECHO —信号输出
4 GND —电源地
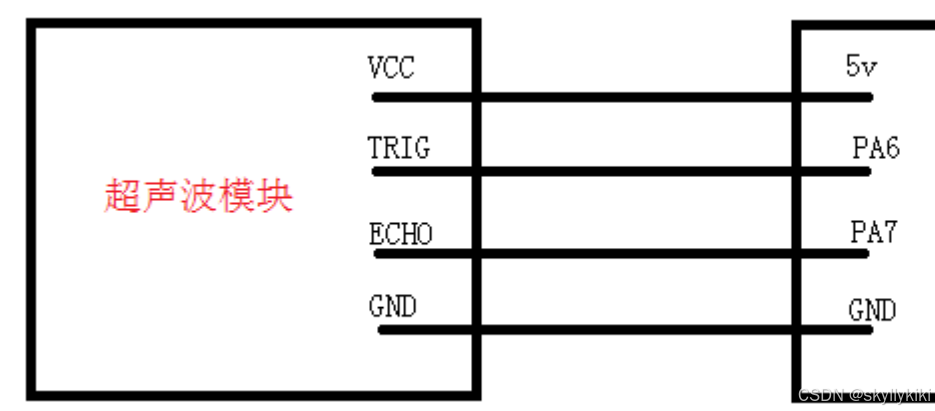
1.4接线原理图
1.5捕获数据流程
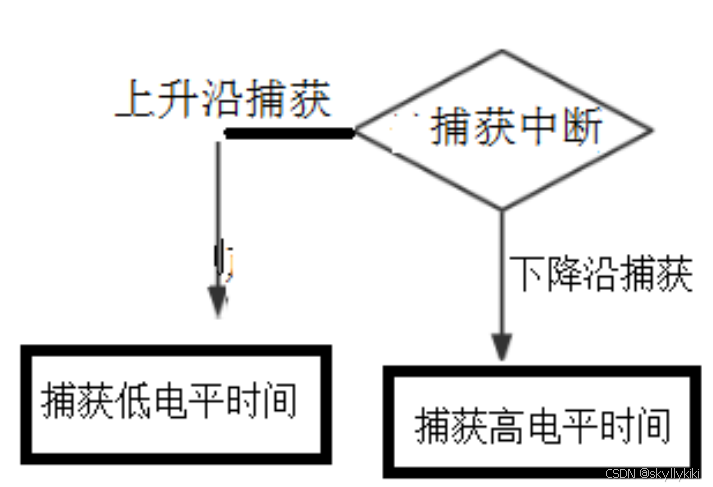
代码编写
#include "ultrasonic.h"
//PA6->TIM3_CH1
//PA7->TIM3_CH2
void ultrasonic_config(void)
{
//打开PA时钟,TIM3时钟
RCC->AHB1ENR |= (1<<0);//打开PA时钟
RCC->APB1ENR |= (1<<1);//打开TIM3时钟
//配置PA6/PA7设置为复用
GPIOA->MODER &= ~(3<<12);
GPIOA->MODER |= (2<<12);//PA6配置为复用模式
GPIOA->MODER &= ~(3<<14);
GPIOA->MODER |= (2<<14);//PA7配置为复用模式
//GPIOA->OSPEEDR |= (2<<12);//PA7输出为50MHz
GPIOA->AFR[0] &= ~(15<<24);
GPIOA->AFR[0] |= (2<<24);//将TIM3映射到PA6引脚
GPIOA->AFR[0] &= ~(15<<28);
GPIOA->AFR[0] |= (2<<28);//将TIM3映射到PA7引脚
//配置TIM3寄存器
TIM3->CR1 &= ~(15<<1);//更新中断UG位产生,禁止单脉冲,递增计数
TIM3->CR1 &= ~(1<<7);//ARR不缓冲
TIM3->CR1 |= (2<<8);//时钟4分频
TIM3->SMCR &= ~(7<<0);//禁止从模式
TIM3->DIER |= (1<<0);//使能更新周期中断
TIM3->DIER |= (1<<2);//使能通道2中断PA7
//TIM3->EGR |= (1<<0);//UG位置1
//M4配置输入输出端口,PA6作为输出,PA7作为输入
TIM3->CCMR1 &= ~(3<<0);//PA6作为输出端口
TIM3->CCMR1 |= (6<<4);//PA6配置为PWM1模式
TIM3->CCMR1 |= (1<<8);//PA7作为输入端口
//TIM3->CCMR1 |= (3<<10);//PA7每发生 8 个事件便执行一次捕获
TIM3->CCMR1 |= (15<<12);//PA7选择15分频输入模式
TIM3->CCER |= (1<<0);//通道1--PA6输出使能
TIM3->CCER &= ~(1<<1);//通道1高电平有效
TIM3->CCER |= (1<<4);//通道2--PA7输入使能
TIM3->CCER |= (1<<5);//双边沿触发
TIM3->CCER |= (1<<7);//非反相
//配置时基单元
TIM3->CNT = 0;
TIM3->PSC = 8399;//8400分频,每计数一次是100us
TIM3->ARR = 9999;//重装载值为10000,完成一次计数周期是1s
TIM3->CCR1 = 10;//1ms发送高电平
NVIC_SetPriority(TIM3_IRQn,5);
NVIC_EnableIRQ(TIM3_IRQn);
TIM3->CR1 |= (1<<0);//计数器使能
}
//配置中断服务函数
void TIM3_IRQHandler(void)
{
static u8 flag = 0;
static u32 count = 0;
static u32 start_ccr = 0;
static u32 time_sum = 0;
static float distance = 0;
if(TIM3->SR & (1<<0))
{
TIM3->SR &= ~(1<<0);//周期中断
if(flag==1)count++;//触发检测
}
if(TIM3->SR & (1<<2))//触发通道中断
{
TIM3->SR &= ~(1<<2);
if(GPIOA->IDR & (1<<7))
{
flag = 1;//触发高电平标志位置1
start_ccr = TIM3->CCR2;
}
else
{
time_sum = 1000000*count + (TIM3->CCR2 - start_ccr)*100;//单位是微秒
distance = time_sum/58.0;
//distance = time_sum *0.34/2/1000;
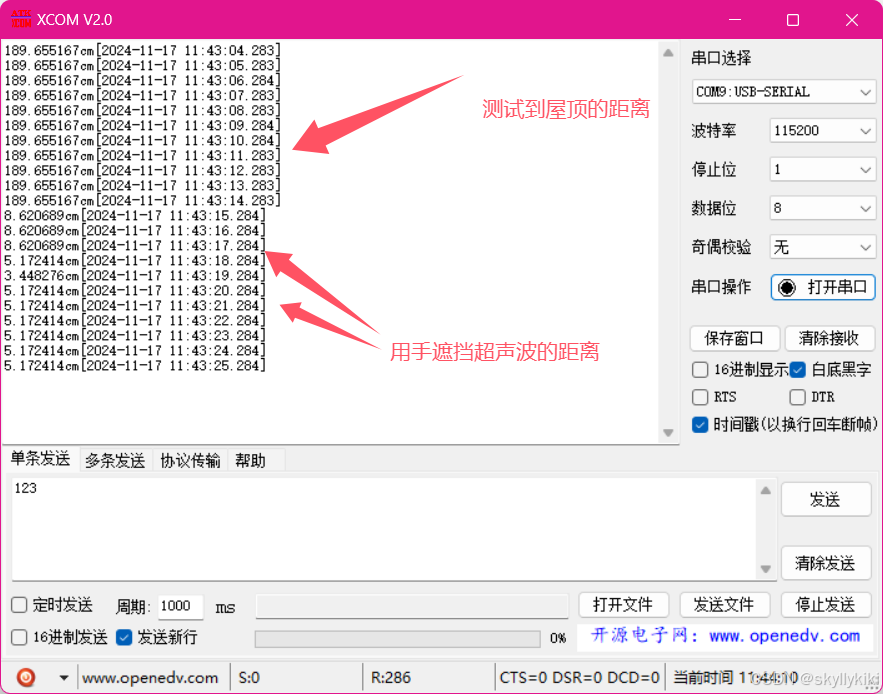
printf("%fcm\r\n",distance);
flag = 0;
count = 0;
start_ccr = 0;
time_sum = 0;
distance = 0;
}
}
}
实现效果,测距准确

















 714
714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









