



投影:从三维世界到二维平面
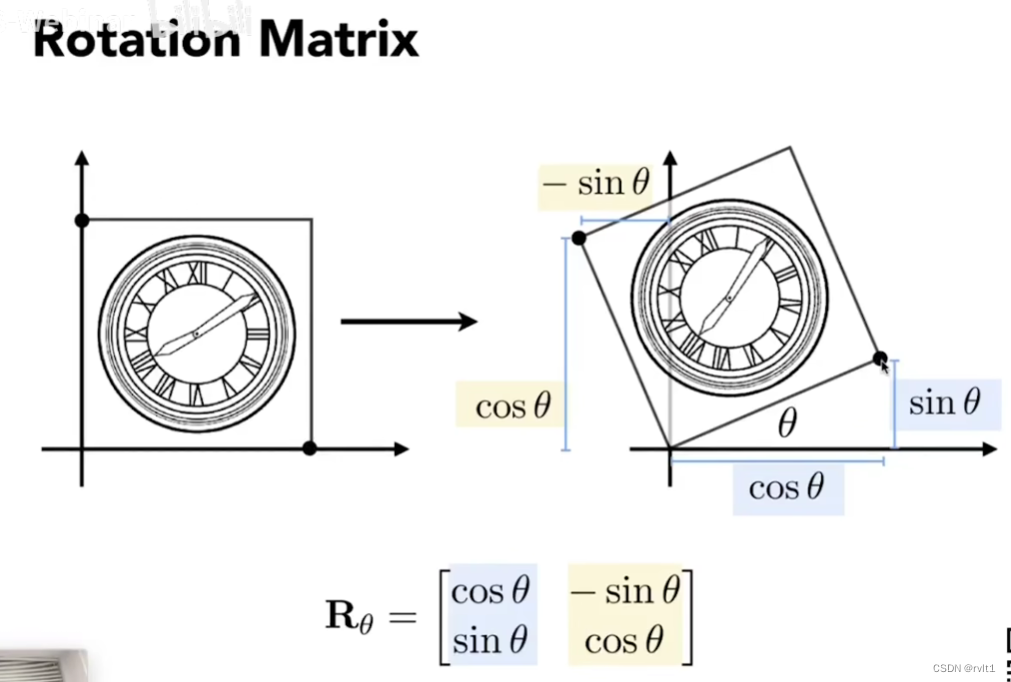
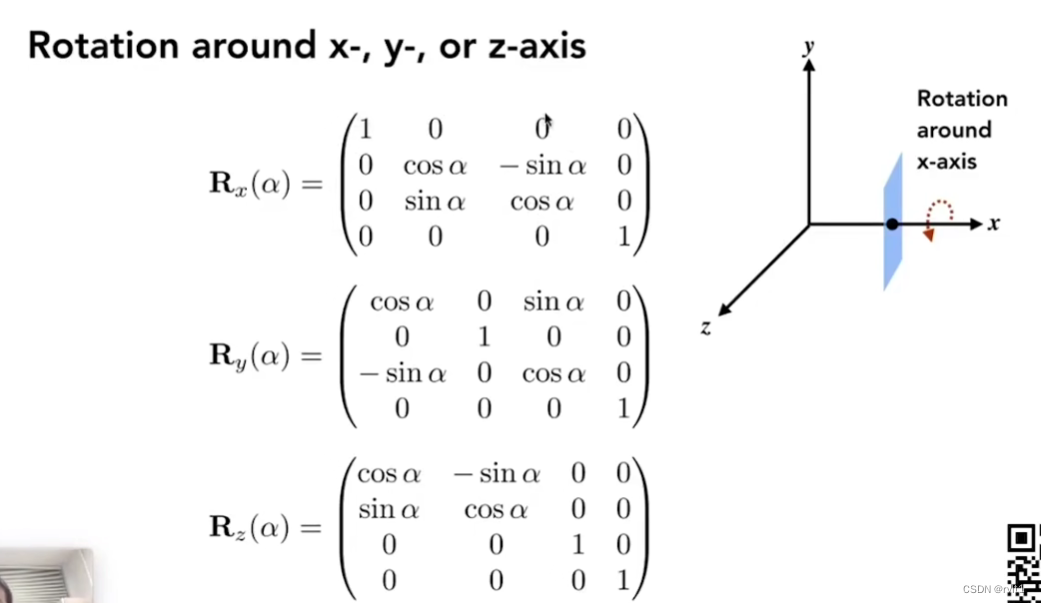
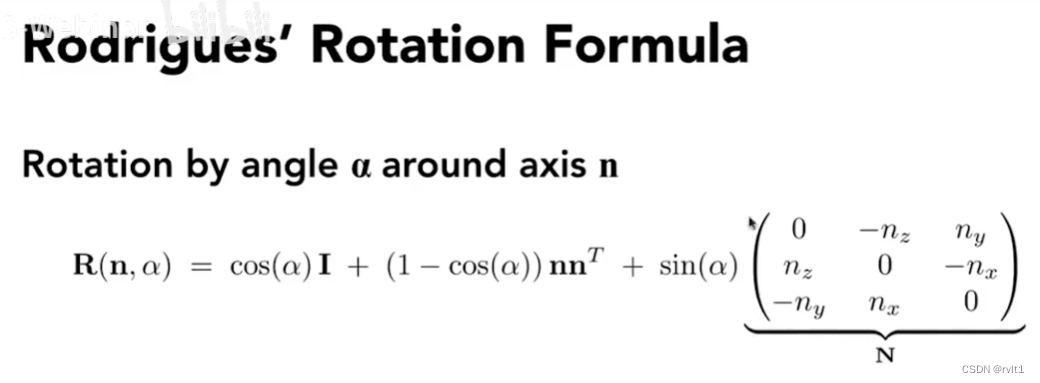
旋转:默认逆时针旋转,把一个图像旋转某个角度公式为:
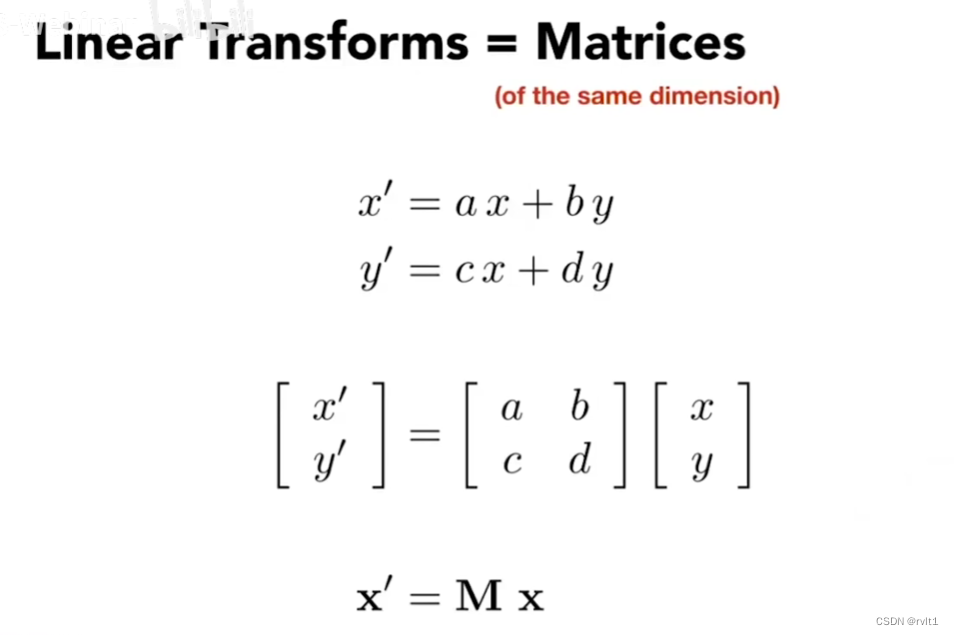
通过矩阵乘法变换:
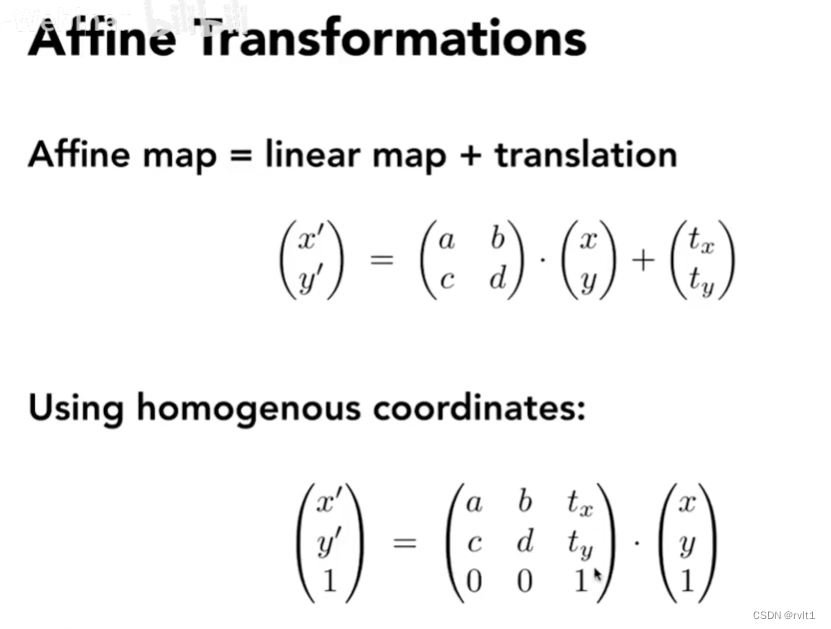
对于平移变换不能直接通过矩阵乘法得到,因此需要引入齐次坐标:
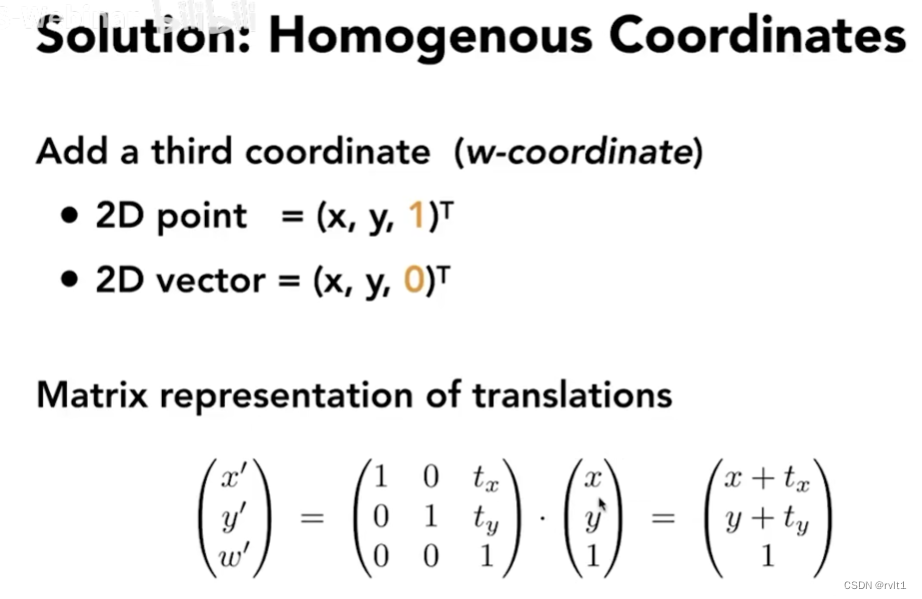
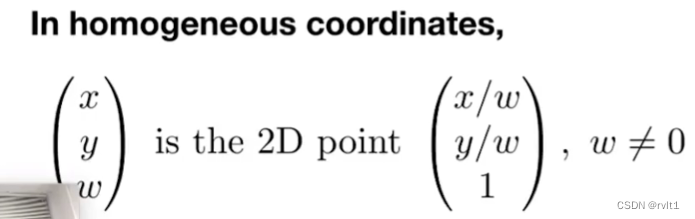
使用齐次坐标的仿射变换:
.
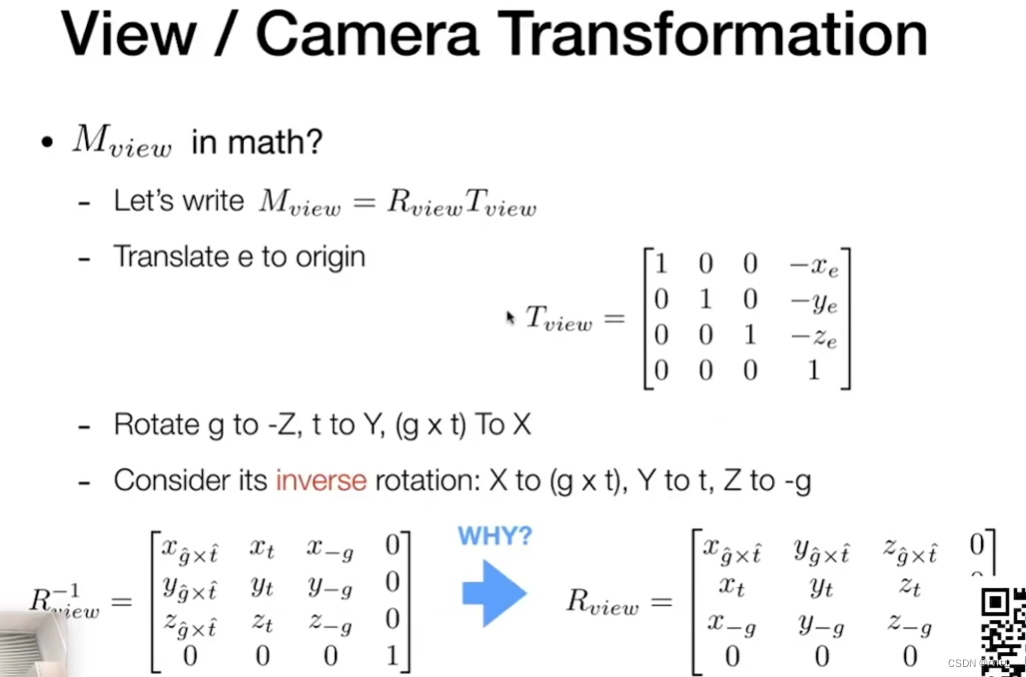 旋转矩阵是正交矩阵,求逆就是求转置。
旋转矩阵是正交矩阵,求逆就是求转置。
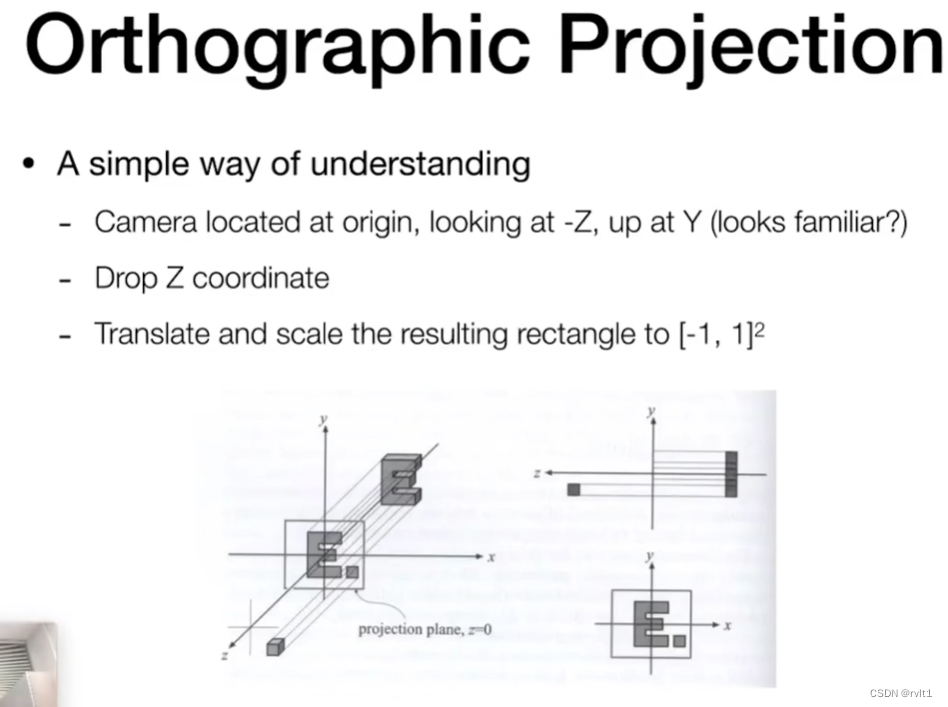
正交投影:
对于第一个矩阵要把r-l缩放到[-1,1]需要将其乘以2/(r-l)。
为什么第二个矩阵是负的,因为要将其移到原点。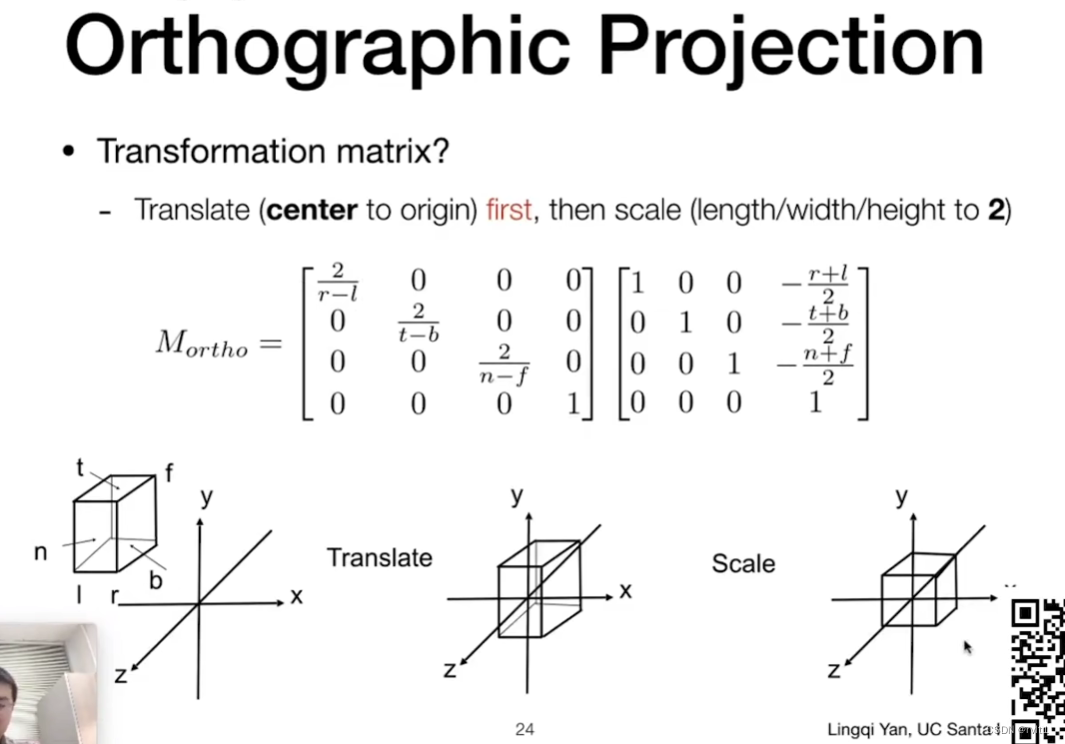
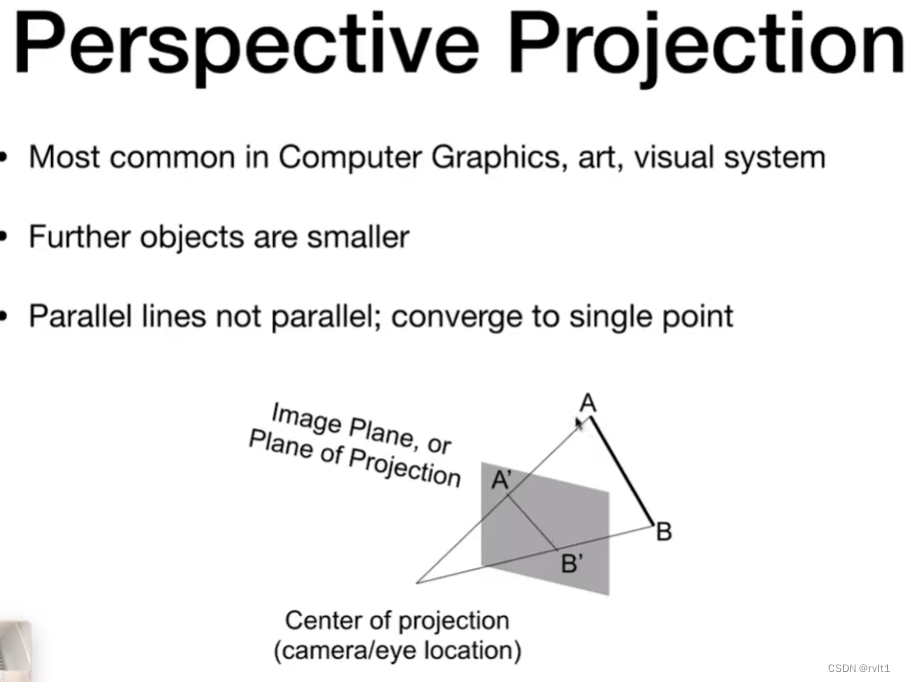
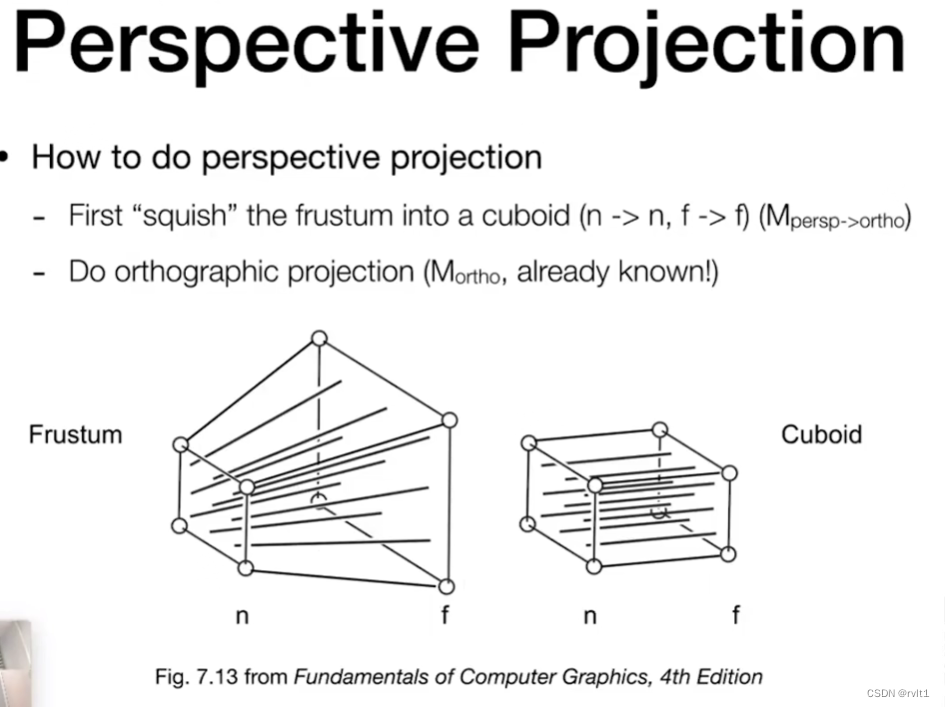
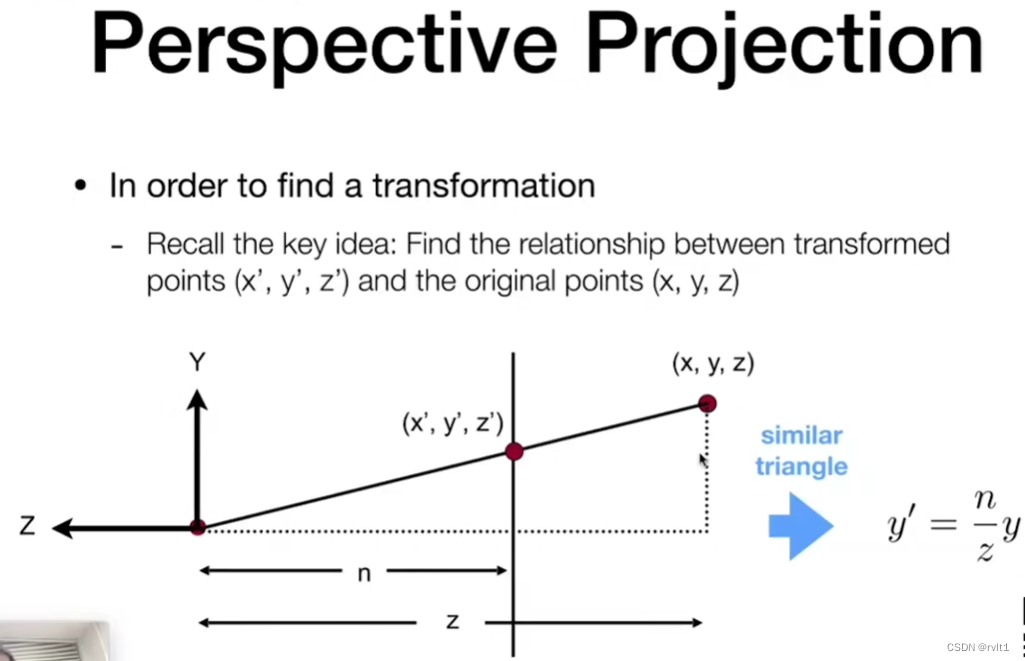
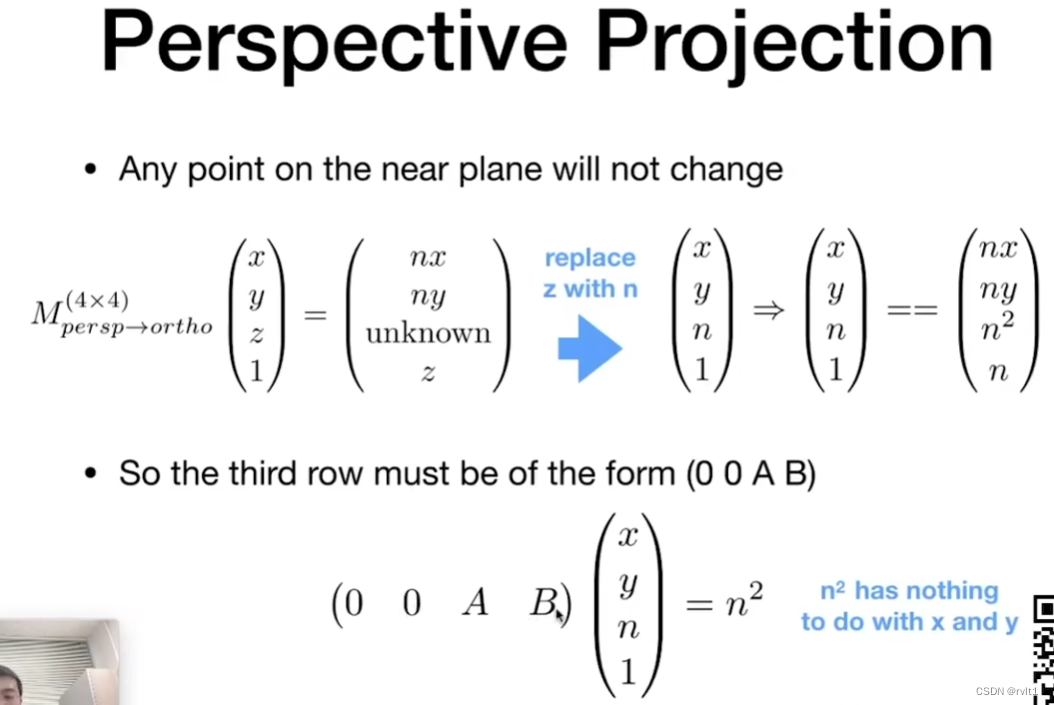
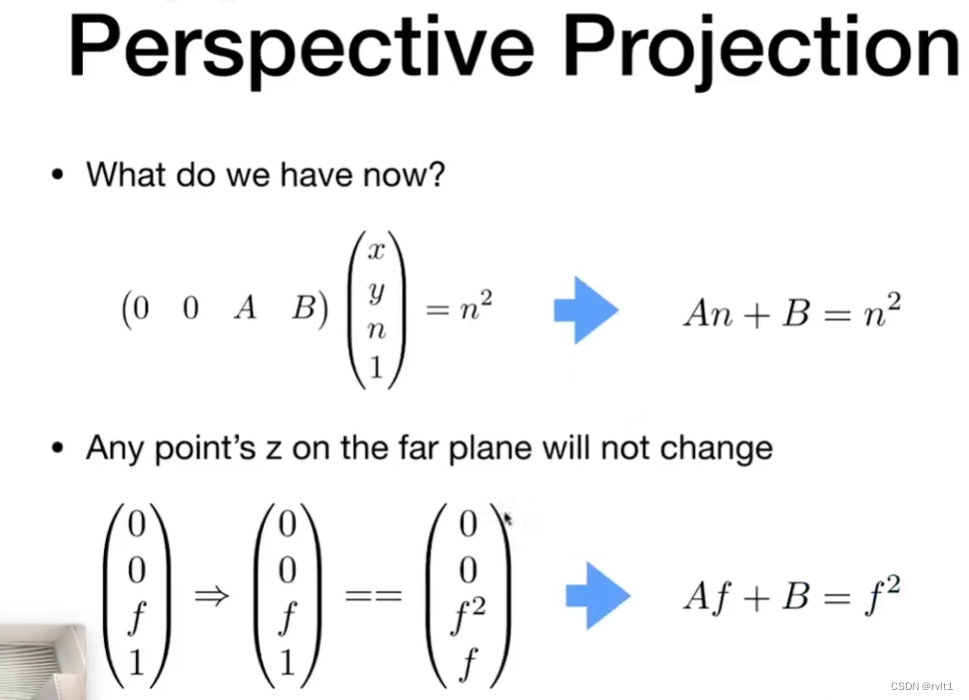
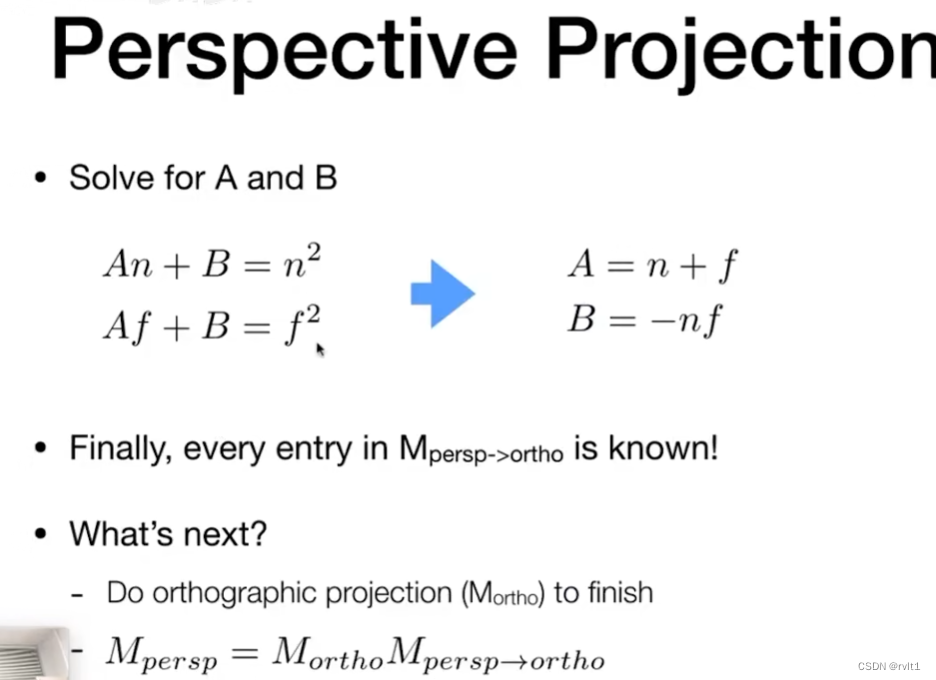
透视投影
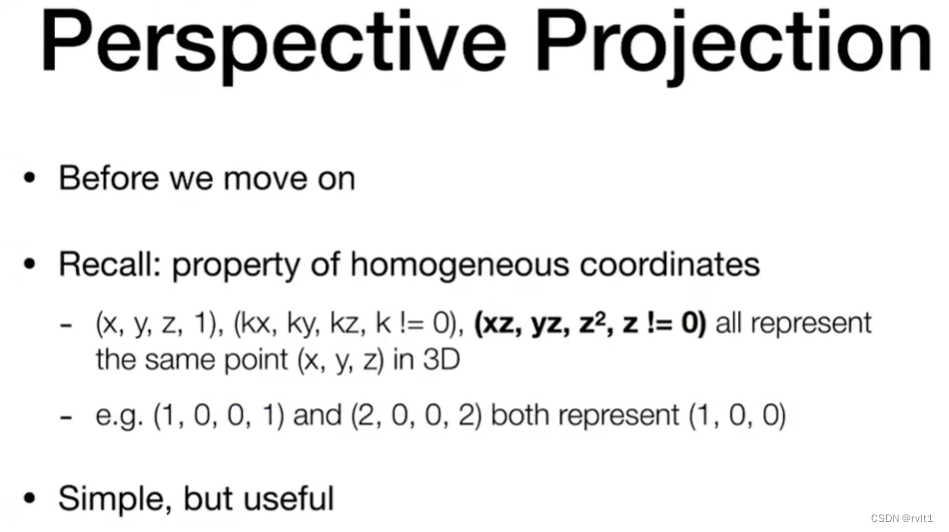
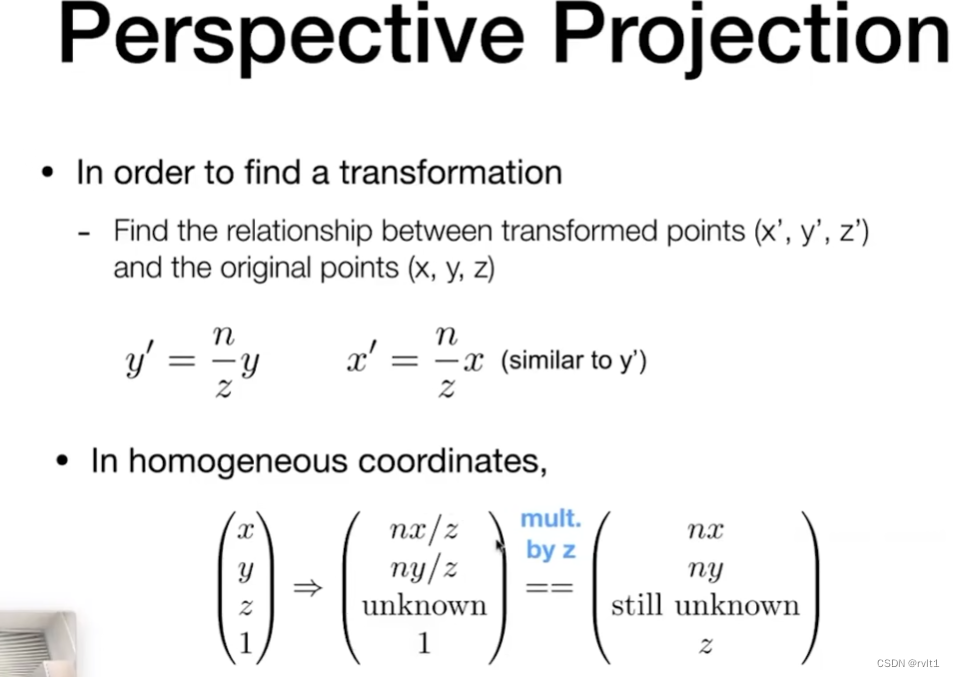
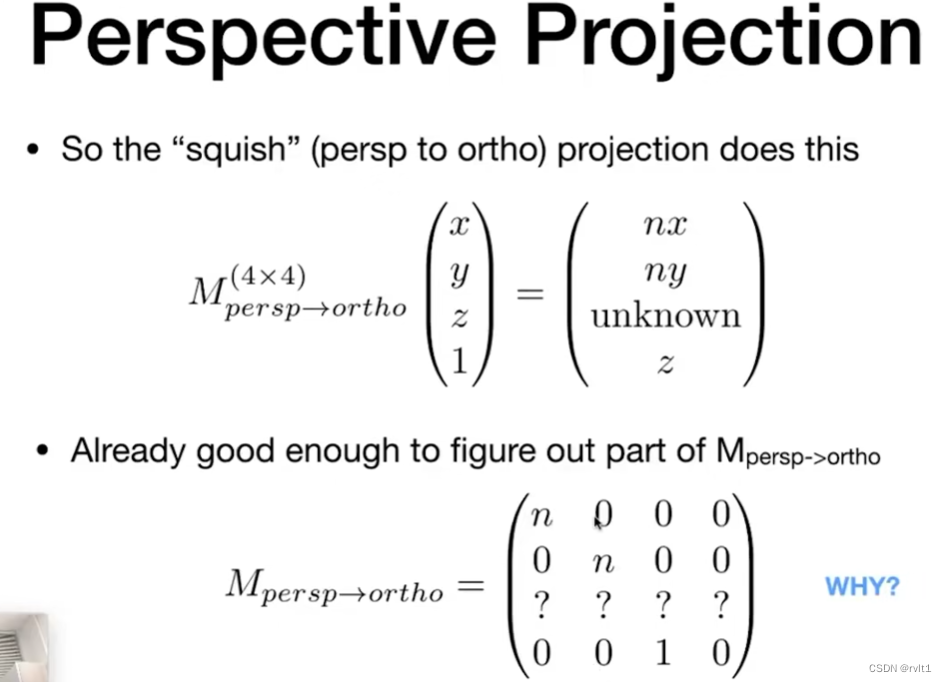
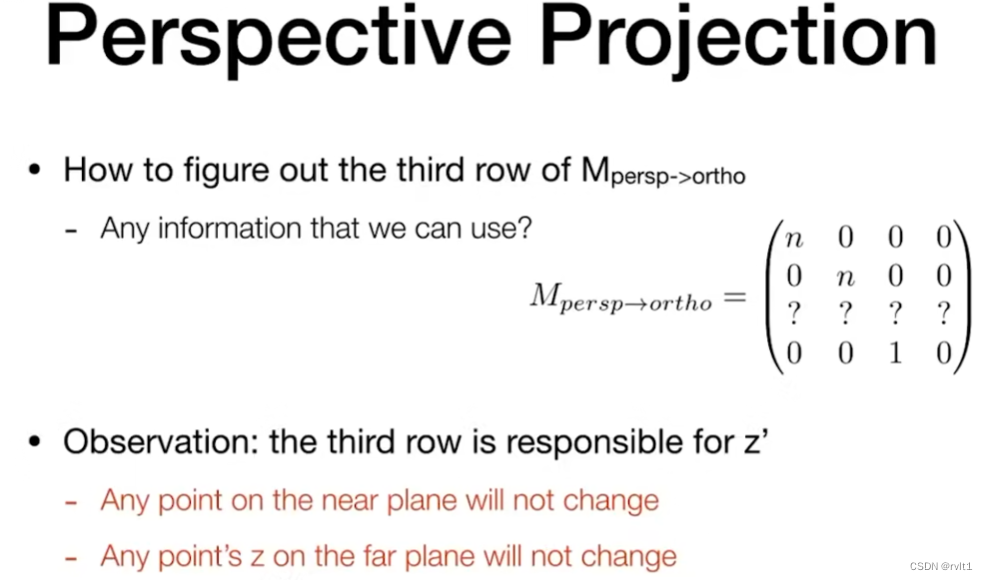
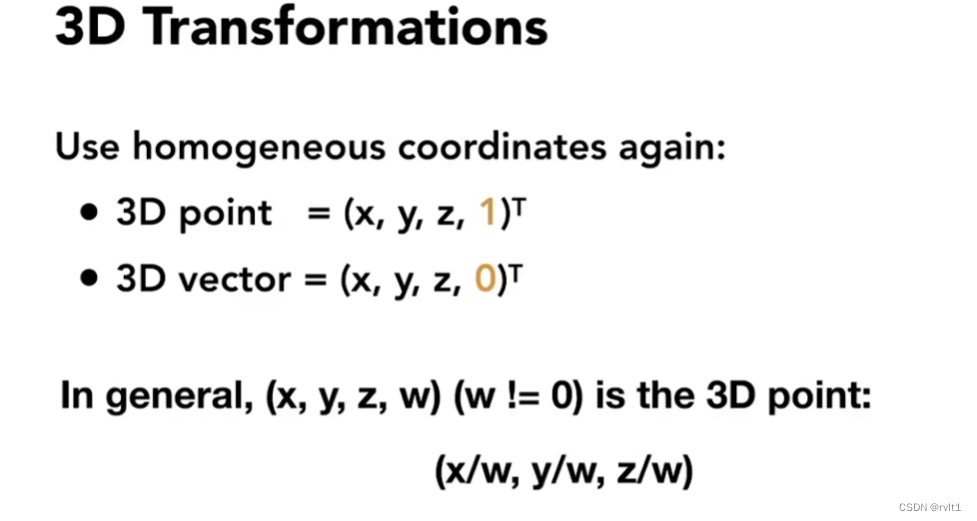
(x y n 1)通过映射还是它自己。
投影:从三维世界到二维平面
旋转:默认逆时针旋转,把一个图像旋转某个角度公式为:
通过矩阵乘法变换:
对于平移变换不能直接通过矩阵乘法得到,因此需要引入齐次坐标:
使用齐次坐标的仿射变换:
.
旋转矩阵是正交矩阵,求逆就是求转置。
正交投影:
对于第一个矩阵要把r-l缩放到[-1,1]需要将其乘以2/(r-l)。
为什么第二个矩阵是负的,因为要将其移到原点。
透视投影
(x y n 1)通过映射还是它自己。
 1241
1460
1241
1460

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























