



 本文介绍了图像处理中的灰度变换和空间滤波基础知识,包括图像反转、对数变换、伽马变换和分段线性变换等方法,以及直方图处理的均衡化和规定化。此外,还探讨了空间滤波的基本原理,如图像平滑和锐化,用于消除噪声和增强图像细节。
本文介绍了图像处理中的灰度变换和空间滤波基础知识,包括图像反转、对数变换、伽马变换和分段线性变换等方法,以及直方图处理的均衡化和规定化。此外,还探讨了空间滤波的基本原理,如图像平滑和锐化,用于消除噪声和增强图像细节。
灰度变换与空间滤波
1.前言
由之前学习过的章节可以知道,空间图像域是包含图像中的像素的平面,也就是图像平面本身,本章节就针对于图像的空间域进行相关知识和技术原理的笔记总结,参考教材为《数字图像处理》(第四版)冈萨雷斯
2.灰度变换和空间滤波基础
本章的空间域处理基于表达式:
g
(
x
,
y
)
=
T
[
f
(
x
,
y
)
]
g(x,y)=T[f(x,y)]
g(x,y)=T[f(x,y)]其中f(x,y)是输入图像,g(x,y)是输出图像,T是定义在点a(x,y)的一个算子(类似于一个函数运算,应用在一幅或一组图像的像素上)。
整个灰度处理过程就是从f中的一个像素点a开始,把T运用到a的领域(以a像素点为中心的外围一圈3x3的像素)上,输出一个值b放到g上对应于f中a的位置上,再处理下一个位置,直到整个图像f处理完。若领域只有1x1的范围,上式中的T就是一个灰度变换函数,即:
s
=
T
(
r
)
s=T(r)
s=T(r)s与r表示对应g和y中某点的灰度。
以上式为例,灰度变换函数有对比度拉伸函数和阈值处理函数两种:
- 对比度拉伸:以一个k值为界,小于m的灰度级r,减少s的值,反之亦然。总的就是亮的更亮,暗的更暗
- 阈值处理:是对比度拉伸的极限形式,小于m的全变成一个灰度级,大的同理
用个简单的图像说明:
3.基本灰度变换函数
主要有四种:
1.图像反转(灰度级数-1-当前灰度,s=L-1-r)
2.对数变换(低灰度较暗的部分变亮)
3.Gamma变换(幂指数校正,可改变对比度,将灰度较窄的区域弄宽)
4.直方图均衡化(增强整体较暗或较亮、对比度不强的图像,使图像变清晰)
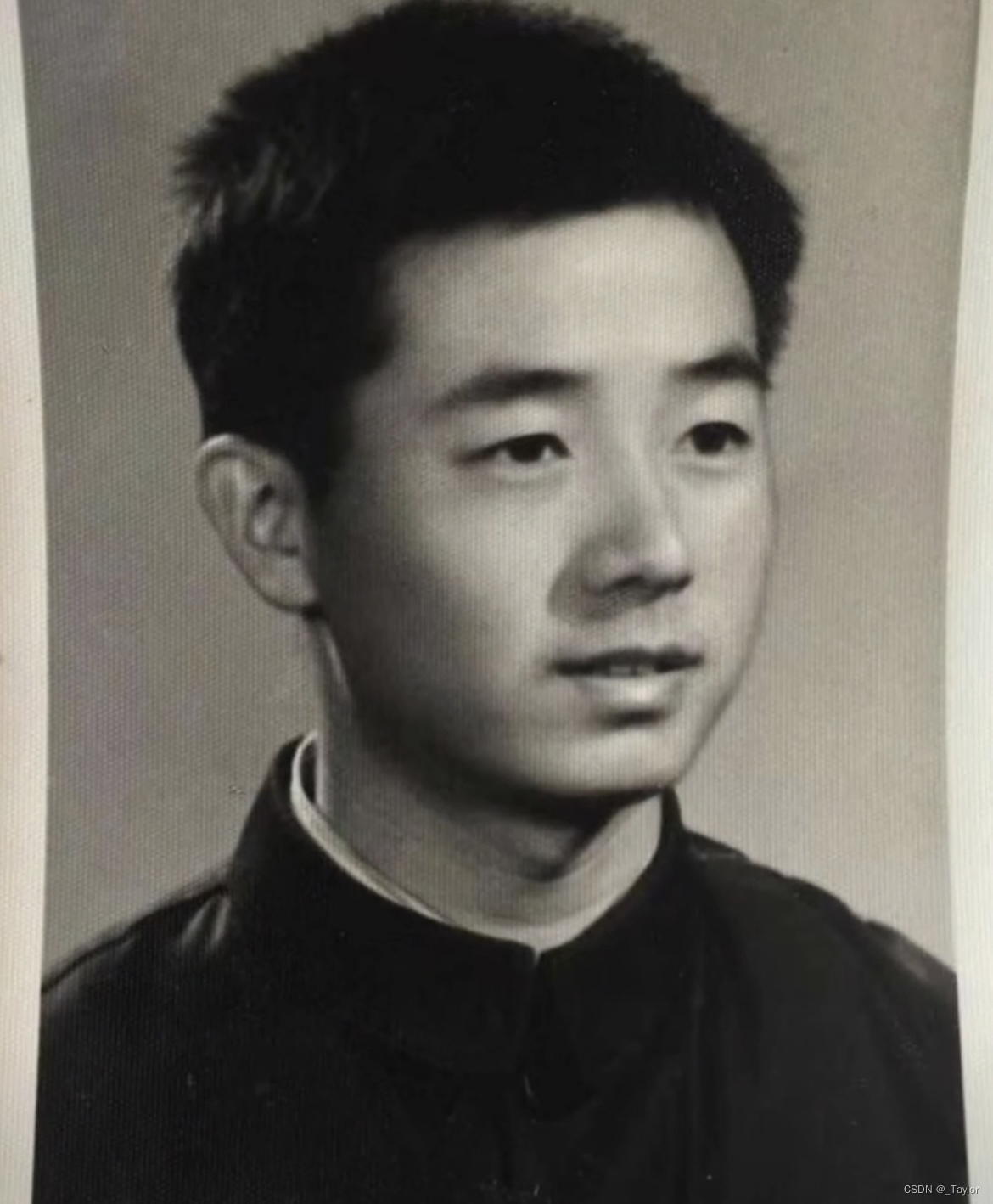
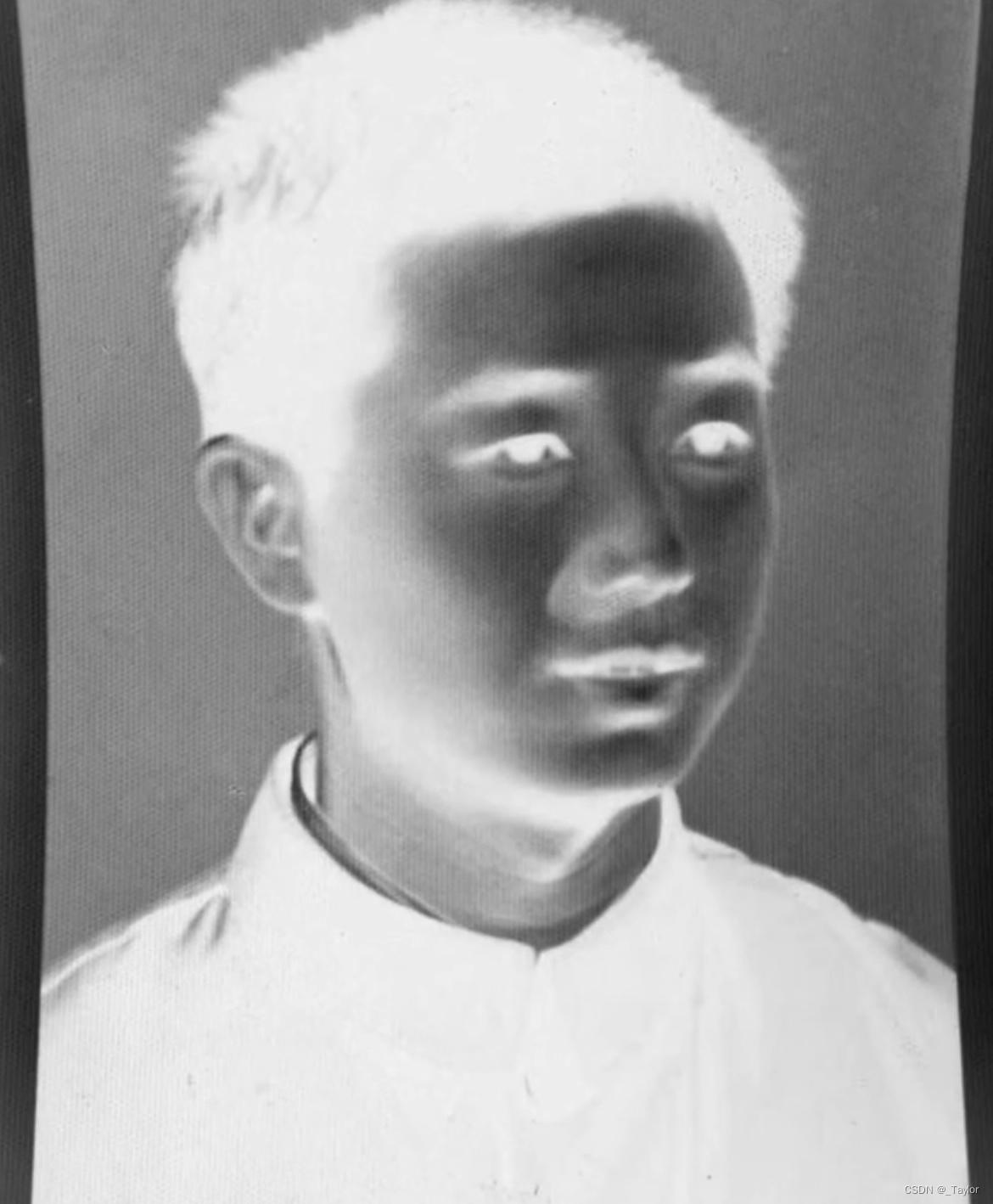
1)图像反转
图像反转的主要原理就是根据公式 s = L − 1 − r s=L-1-r s=L−1−r得到灰度级在[0,L-1]的反转图像,以下是转换的代码:
from PIL import Image
# 打开图像并转为灰度模式
img = Image.open("./img/test.jpg").convert("L")
# 获取图像的宽度和高度
width, height = img.size
# 遍历每个像素点并反转灰度值
for x in range(width):
for y in range(height):
pixel = img.getpixel((x, y))
img.putpixel((x, y), 255 - pixel)
# 保存反转后的图像
img.save("./img/image_inverted.jpg")
下面是上述代码通过对左图进行灰度反转后的右图结果:
 |  |
2)对数变换
对数变换的原理就是根据公式: s = c l o g ( 1 + r ) s=clog(1+r) s=clog(1+r)对图像进行转换,由对数曲线的形状可以看出是将输入的较窄的灰度值变宽,使灰暗的地方变亮,方便图像的观察,反之亦然。这类变换往往用来扩展图像中的暗像素值,压缩高灰度级值。以下是对数变换的代码:
from PIL import Image
import math
# 打开图像并转换为灰度图像
img = Image.open('./img/test1.tif').convert('L')
# 获取图像的宽度和高度
width, height = img.size
# 对数变换的常数
c = 255 / math.log(1 + img.getextrema()[1])
# 对每个像素应用对数变换
for x in range(width):
for y in range(height):
# 获取像素的亮度值
pixel = img.getpixel((x, y))
# 计算对数变换后的值
new_pixel = int(c * math.log(1 + pixel))
# 更新像素值
img.putpixel((x, y), new_pixel)
# 保存变换后的图像
img.save('output.jpg')
以下是测试图片的原始和结果图:
 |  |
3)幂律(伽马)变换
伽马变换的公式为:
s
=
c
r
γ
s=cr^\gamma
s=crγ和对数变换类似,伽马变换的原理也是将较窄的暗灰度值变宽,反之同理,不过变换的效果是由指数gamma的值决定的,且gamma>1和<1时生成的曲线效果正好相反。下图是当c=1时改变gamma值显示的图形:
伽马校正或伽马编码就是用于校正幂律响应现象的处理过程,有时较大的gamma值会使处理后的图像好于原图,下面是gamma变换的代码:
def gamma_correction(image, gamma):
"""Gamma变换"""
# 构建Gamma查找表
inv_gamma = 1.0 / gamma
table = np.array([((i / 255.0) ** inv_gamma) * 255 for i in range(256)]).astype('uint8')
# 应用Gamma变换
return Image.fromarray(cv2.LUT(np.array(image), table))
# 加载图像
img = Image.open("./img/gamma.jpg").convert('L')
# 进行Gamma变换
gamma = 1.5
img_gamma = gamma_correction(img, gamma)
# 显示原图和Gamma变换后的图像
# img.show()
# img_gamma.show()
img.save('gammaput.jpg')
代码的实现如下,从左到右自上而下分别为原图和gamma值为1.5、3.5和6.5的转换图:
 |  |
 |  |
4)分段线性变换
这个与之前的三种方法互补,优点是形式可以随意复杂,但是需要用户输入很多参数,主要有对比度拉伸、灰度级分层、比特平面分层
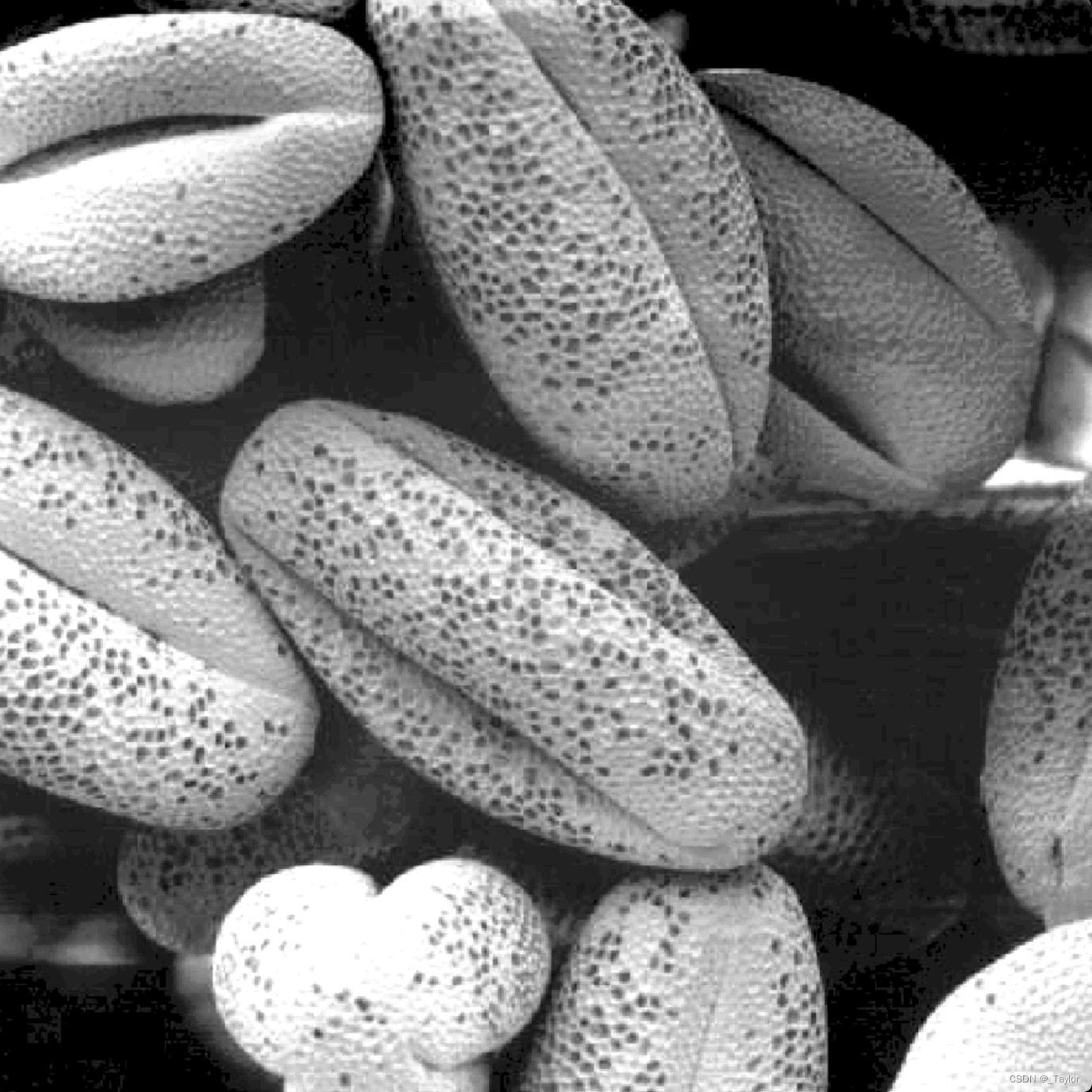
- 对比度拉伸:光照、传感动态范围等都可能产生低对比度图像,该变换可以扩展图像灰度级范围,达到理想的灰度范围,就是通过这个变换可以是对比度变高,对比拉伸代码如下:
from PIL import Image
import numpy as np
def contrast_stretch(img_path, min_percentile=1, max_percentile=99):
# 打开图像
img = Image.open(img_path)
# 转换为灰度图像
gray_img = img.convert('L')
# 转换为NumPy数组
img_array = np.array(gray_img)
# 计算像素值的最小值和最大值
min_value, max_value = np.percentile(img_array, (min_percentile, max_percentile))
# 对图像进行对比度拉升
img_array = (img_array - min_value) * 255 / (max_value - min_value)
# 将图像像素值限制在0到255之间
img_array = np.clip(img_array, 0, 255).astype(np.uint8)
# 将NumPy数组转换为PIL图像
result_img = Image.fromarray(img_array)
return result_img
result_img = contrast_stretch('./img/对比.png', min_percentile=5, max_percentile=95)
result_img.save('./img/duibi.jpg')
效果如下图所示(左图为花粉的低对比度图像,右图为对比度拉伸后的结果):
 |  |
- 灰度级分层:这种方法目的是为了突出图像中的特定灰度区间,它可以由基本的两种方法实现:一种是将给定范围内的灰度值都显示为一个值(也就是一个色),其他的显示为另一个值;另一种是是期望的灰度范围变亮(或变暗),保持其他灰度级不变
- 比特平面分层:像素值是由比特组成的整数,比特平面分层就是可以涂出特定比特的部分像素,使图像有多分层的灰度值,这样能更好的适应多类型的实际应用
由于分段线性变换的函数比较有共同点,后两个就不放代码和图了
注意⚠️之后部分内容是自己看视频学习的,与书的排版不一致
4.直方图处理:
令rk,k=0,1,2…,L-1表示一幅L级的f(x,y)的灰度。f的非归一化直方图定义为 h ( r k ) = n k , k = 0 , 1 , 2.... L − 1 h(r_k)=n_k,k=0,1,2....L-1 h(rk)=nk,k=0,1,2....L−1式中,nk是f中灰度为rk的像素的数量,细分的灰度级数称为直方图容器,同理,归一化的直方图定义为 p ( r k ) = h ( r k ) M N = n k M N p(r_k)=\frac{h(r_k)}{MN}=\frac{n_k}{MN} p(rk)=MNh(rk)=MNnk式中M和N分别表示图像的行数和列数,大部分情况都是归一化的直方图,简称直方图或者图像直方图。
- 目的:使图像变清晰,灰度值变大,值变均匀,算熵先算出每个灰度级像素块的概率,再用求熵的公式。
1)直方图处理均衡化
非线性拉伸,扩展灰度多的像素,缩减灰度少的,使直方图均匀化。过程是求出不同灰度级的概率Pk,累计直方图Sk,最后用公式求出新的概率,具体例子如下(其中L为0-7,即L=8):
2)直方图处理规定化
将求出的直方图p1与给定的直方图p2进行对比,将两个直方图进行对比,最接近的p1变成p2,具体的例子如下,序号3中的灰度级1与序号5中的灰度级3最接近,则将0映射到3,如序号7中所示,没有转移的灰度级概率就是0:

3)局部直方图处理
当想增强图像中的几个小区域细节时,就需要局部的像素灰度分布变换,过程是先定义一个领域,将其中心垂直或者水平移动,每次都计算中心点的直方图,得到均衡化或者规定化函数,以此得到中心的灰度值
5.空间滤波基础
原理
即图像f和滤波器核w之间的乘积之和运算
图像增强
- 目的:消除噪声或模糊图像
噪声分类:
1.椒盐噪声:由图像传感器、传输信号、解码处理等产生黑白相间的亮暗噪声幅值相同,黑白值可以看成极大值和极小值的噪声,出现点随机,用中值滤波效果较好,不是加性或者乘性噪声
2.高斯噪声:图像上每一点都存在噪声,噪声位置随机分布,用均值滤波好(卷积),是加性噪声 - 增强方法:图像平滑(模糊)和图像锐化(突出过渡部分,寻找边界,增强图像):
图像平滑有
1.邻均平均滤波(线性):能够除去突变的像素点,简单但会使图像变模糊。特点是对椒盐噪声平滑效果不好。其步骤是先进行领域平均(卷积)算出中间像素块值,再用中间量进行阈值法平均滤波进行灰度矩阵的修改。这两个晦涩难懂了解一下就明白。
2.中值滤波法(非线性):将向元灰度值升序排序,中位数作为当前向元输出。特点是对椒盐噪声平滑效果好,但是对于点,线,尖角细节多的不适合。
3.高斯滤波法(线性):原理与均值滤波器类似,但是算法不同,将各个位置的坐标带入到高斯函数中,得到模版的系数,再用系数求出新的值。其中高斯核的标准差σ看使用的场景,σ小,生成的模版中心系数较大,周围系数较小,平滑效果不是很明显(趋向于中值滤波),反之效果明显(趋向于平均滤波)。
平滑滤波器的代码和图像例子如下,左边是原图,右边是经过平滑滤波器后的图:
import numpy as np
import cv2
def apply_mean_filter(image, kernel_size):
# 获取图像的宽度和高度
height, width = image.shape[:2]
# 创建一个与输入图像相同大小的空白图像
smoothed_image = np.zeros_like(image, dtype=np.float32)
# 计算滑动窗口的半径
radius = kernel_size // 2
for i in range(height):
for j in range(width):
# 计算当前像素周围窗口的边界
top = max(i - radius, 0)
bottom = min(i + radius + 1, height)
left = max(j - radius, 0)
right = min(j + radius + 1, width)
# 提取窗口内的像素值
window = image[top:bottom, left:right]
# 计算窗口内像素的均值
mean_value = np.mean(window)
# 在平滑图像中设置当前像素的值
smoothed_image[i, j] = mean_value
# 将浮点图像转换为8位灰度图像
smoothed_image = np.uint8(smoothed_image)
return smoothed_image
# 读取图像
image = cv2.imread('./img/pinghua.jpeg', cv2.IMREAD_GRAYSCALE)
# 应用均值滤波器
smoothed_image = apply_mean_filter(image, kernel_size=5)
# 显示原始图像和平滑图像
cv2.imshow('Original Image', image)
cv2.imshow('Smoothed Image', smoothed_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
 |  |
图像锐化有
1.Prewitt算子(一阶微分算子):作用是用不同方向的算子检测不同类型的边缘或线,原理是通过一阶微分算子准确定位到边缘线

2.Sobel算子(一阶微分算子):作用同Prewitt算子,原理是通过中心点达到平滑的目的,即比Prewitt多了平滑功能

3.拉普拉斯算子 (二阶微分算子):作用是可以检测到灰度突变的点,原理是通过二阶微分算子准确定位到突变的点7
在有了锐化结果后,在原图上加上或者减去锐化结果,就得到了增强的图像,注意分清是减还是加,防止叠加后的结果变成负值。
锐化滤波器的代码和图像例子如下,左边是原图,右边是经过平滑滤波器后的图:
import numpy as np
import cv2
def apply_sharpen_filter(image):
# 定义锐化卷积核
kernel = np.array([[0, -1, 0],
[-1, 6, -1],
[0, -1, 0]])
# 对图像进行卷积操作
sharpened_image = cv2.filter2D(image, -1, kernel)
return sharpened_image
# 读取图像
image = cv2.imread('./img/ruihua.jpeg', cv2.IMREAD_GRAYSCALE)
# 应用锐化滤波器
sharpened_image = apply_sharpen_filter(image)
# 显示原始图像和锐化后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Sharpened Image', sharpened_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
 |  |
总结
不同的应用要选择不同的滤波器,前提是要熟悉各种滤波器的原理,才能在使用时更加适合,同时可以使用不同的滤波器相互组合使用,以此来达到最佳适合的处理方法。
6.章总结
本章学习了空间域图像处理的意义和相关的技术原理,以及直方图、空间滤波卷积的相关知识,对于图像的各种变化如灰度分层,模糊,锐化处理都有了初步的认识,对各种类型的空间滤波器也有了初步的印象,在不同的实际情况下需要根据不同滤波器的特点来应用

















 999
999

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









