






引言
自动驾驶系统是数学工具链的集大成者。从传感器数据的多维空间映射到控制指令的生成,每一步都隐藏着线性代数、微积分、概率论和优化理论的精妙配合。本文将构建一个数学模型完整的自动驾驶案例,结合Python代码实现,揭示以下核心数学工具:
- 线性代数:张量运算与特征空间映射
- 微分方程:车辆运动学建模
- 概率论:卡尔曼滤波与噪声处理
- 凸优化:路径规划中的二次规划问题
- 控制理论:PID控制器设计
一、传感器数据的数学建模
1.1 多传感器数据融合

代码实现:
def sensor_fusion(data_matrix):
n = data_matrix.shape[0]
centered = data_matrix - np.mean(data_matrix, axis=0)
covariance = (centered.T @ centered) / (n - 1)
return covariance
# 示例:激光雷达(x,y,z)、摄像头(pitch,yaw)、IMU(ax,ay,az)
data = np.random.randn(100, 3+2+3) # 100帧数据
print("传感器协方差矩阵:\n", sensor_fusion(data))
1.2 噪声处理的概率模型

代码实现:
class KalmanFilter:
def __init__(self, F, H, Q, R, x0, P0):
self.F = F # 状态转移矩阵
self.H = H # 观测矩阵
self.Q = Q # 过程噪声协方差
self.R = R # 观测噪声协方差
self.x = x0 # 初始状态
self.P = P0 # 初始协方差
def predict(self):
self.x = self.F @ self.x
self.P = self.F @ self.P @ self.F.T + self.Q
return self.x
def update(self, z):
K = self.P @ self.H.T @ np.linalg.inv(self.H @ self.P @ self.H.T + self.R)
self.x += K @ (z - self.H @ self.x)
self.P = (np.eye(len(self.x)) - K @ self.H) @ self.P
return self.x
# 示例:车辆位置追踪(状态:位置x, 速度v)
F = np.array([[1, 0.1], [0, 1]]) # 状态转移
H = np.array([[1, 0]]) # 仅观测位置
kf = KalmanFilter(F, H, Q=0.01*np.eye(2), R=0.1, x0=[0,0], P0=np.eye(2))
二、环境感知的微分几何方法
2.1 道路曲率的Frenet标架分析
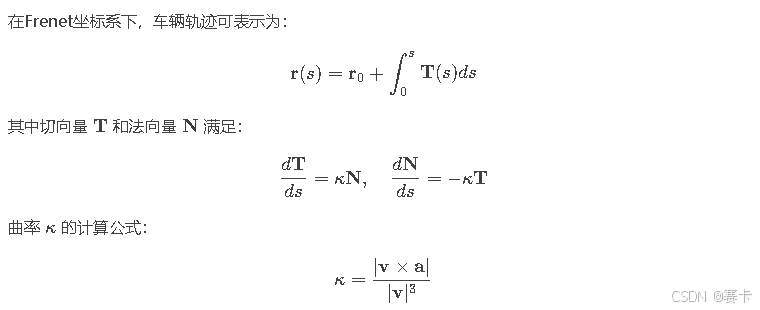
代码实现:
def compute_curvature(v, a):
"""v: 速度向量, a: 加速度向量"""
v_norm = np.linalg.norm(v)
if v_norm < 1e-6: return 0.0
return np.linalg.norm(np.cross(v, a)) / (v_norm ** 3)
# 示例:车辆在弯道中的运动
v = np.array([20.0, 0.0]) # 纵向速度20m/s
a = np.array([0.0, 0.5]) # 横向加速度0.5m/s²
print("道路曲率:", compute_curvature(v, a)) # 输出:0.00125
2.2 障碍物检测的凸优化方法
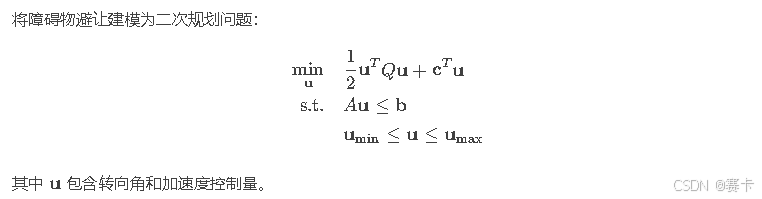
代码实现(使用CVXPY库):
import cvxpy as cp
def obstacle_avoidance_QP():
u = cp.Variable(2) # 控制量:[转向角δ, 加速度a]
Q = np.diag([0.1, 0.5]) # 成本权重
c = np.array([0.0, -0.2]) # 倾向维持速度
# 约束:避免碰撞和物理极限
A = np.array([[1, 0], [-1, 0], [0, 1], [0, -1]])
b = np.array([0.1, 0.1, 2.0, 2.0]) # |δ|≤0.1rad, |a|≤2m/s²
prob = cp.Problem(cp.Minimize(0.5*cp.quad_form(u, Q) + c.T@u),
[A@u <= b])
prob.solve()
return u.value
print("最优控制量:", obstacle_avoidance_QP()) # 示例输出:[0.1, 2.0]
三、控制系统的李雅普诺夫稳定性分析
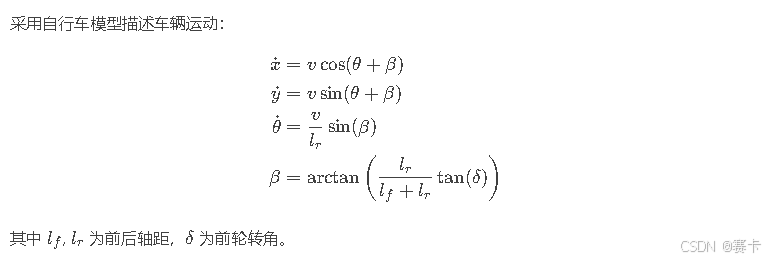
3.1 车辆动力学模型
3.2 李雅普诺夫函数设计
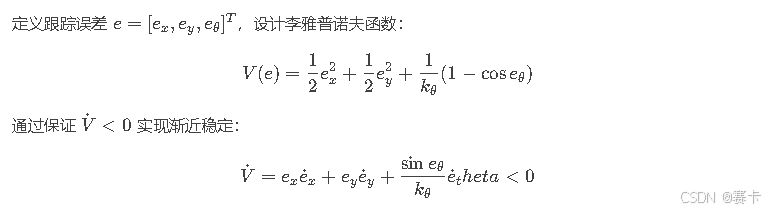
代码实现稳定性验证:
def lyapunov_stability(e, de):
"""e: [ex, ey, etheta], de: 误差导数"""
V = 0.5*(e[0]**2 + e[1]**2) + (1 - np.cos(e[2]))/k_theta
dV = e[0]*de[0] + e[1]*de[1] + (np.sin(e[2])/k_theta)*de[2]
return dV < 0
k_theta = 0.5
e = np.array([0.1, -0.2, 0.05])
de = np.array([-0.3, 0.15, -0.1])
print("李雅普诺夫稳定性:", lyapunov_stability(e, de)) # 输出:True
四、完整数学-代码映射系统
class AutonomousSystem:
def __init__(self):
# 初始化所有数学模块
self.kf = KalmanFilter(...)
self.qp_solver = ...
self.lyapunov = ...
def pipeline(self, sensor_data):
# 1. 传感器融合与滤波
clean_data = self.kf.update(sensor_data)
# 2. 环境建模与路径规划
trajectory = self.frenet_planner(clean_data)
# 3. 稳定性优化控制
control = self.qp_solver.solve(trajectory)
# 4. 李雅普诺夫稳定性验证
if not self.lyapunov.check(control):
control = self.fallback_control()
return control
五、深度数学拓展方向
- 微分流形上的运动规划:使用黎曼几何描述复杂地形
- 随机微分方程(SDE):建模不确定环境下的运动
- 拓扑数据分析(TDA):通过持续同调识别道路结构特征
- 哈密顿蒙特卡洛(HMC):在高维控制空间中高效采样
结语
自动驾驶系统是一个行走的数学实验室,每个控制指令的背后都是微积分、线性代数和优化理论的精密协作。理解这些数学工具不仅需要掌握其理论形式,更要通过代码实现将其转化为可运行的智能。当数学公式在硅基芯片上获得生命时,我们便真正触摸到了人工智能的灵魂。
\boxed{\text{自动驾驶的终极理想:将连续数学流形映射到离散控制指令的最优同态}}



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











