







 本文深入探讨了OpenCV中的凸包检测技术,包括概念解析、两种主要算法(Graham扫描法和Jarvis步进法)的原理及应用,同时提供了详细的API说明和代码实例,帮助读者理解和实践凸包检测。
本文深入探讨了OpenCV中的凸包检测技术,包括概念解析、两种主要算法(Graham扫描法和Jarvis步进法)的原理及应用,同时提供了详细的API说明和代码实例,帮助读者理解和实践凸包检测。
目录
一、前言
继续更新有关于opencv的基础博客,即将更新完毕,想想有点开心呢!
如果想看其他有关于OpenCV学习方法介绍、学习教程、代码实战、常见报错及解决方案等相关内容,可以直接看我的OpenCV分类:
【OpenCV系列】:https://blog.youkuaiyun.com/shuiyixin/article/category/7581855
如果你想了解更多有关于计算机视觉、OpenCV、机器学习、深度学习等相关技术的内容,想与更多大佬一起沟通,那就扫描下方二维码加入我们吧!

二、凸包
1、概念
凸包(Convex Hull)本身是一个计算几何(图形学)中的概念。
首先我们先来理解一下凸包。
从字面意思来看,凸包,就是两点:
(1)凸:得到的结果是一个凸出的形状,可以理解为一个凸多边形。
(2)包:包围图像中的所有东西。
举个例子,大家就能够更加直观的理解了:
我们也可以理解为这个是一个平面,上面钉了很多钉子,然后用一根细线或者橡皮筋把他包围起来,包围的这一周就是凸包。
当然,这个是对于二维平面,我们通过二维平面来理解凸包,那我们现在给出在多维平面(向量空间)中的定义:
在一个实数向量空间V中,对于给定集合X,所有包含X的凸集的交集S被称为X的凸包。X的凸包可以用X内所有点(X1,...Xn)的凸组合来构造.
2、凸包查找算法
我们要找到凸包,有两种算法。
(1)Graham扫描法
(2)Jarvis步进法
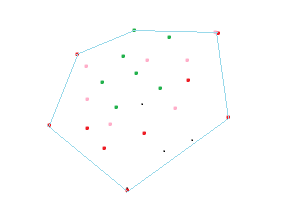
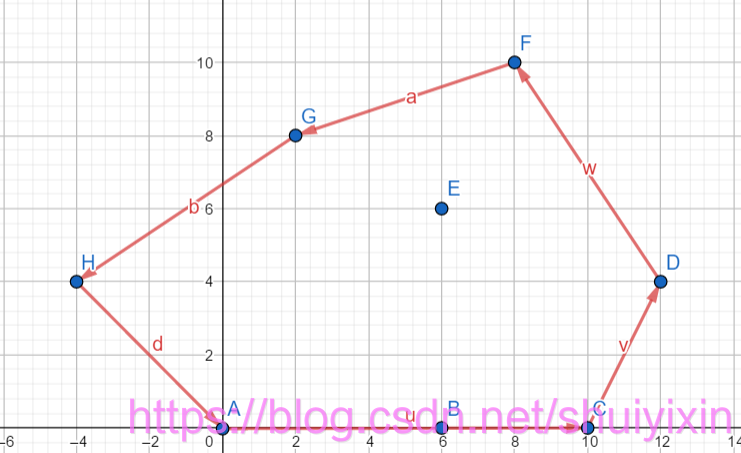
对于下面的这些点,我们使用这两种凸包算法来求解凸包。
1.Graham扫描法
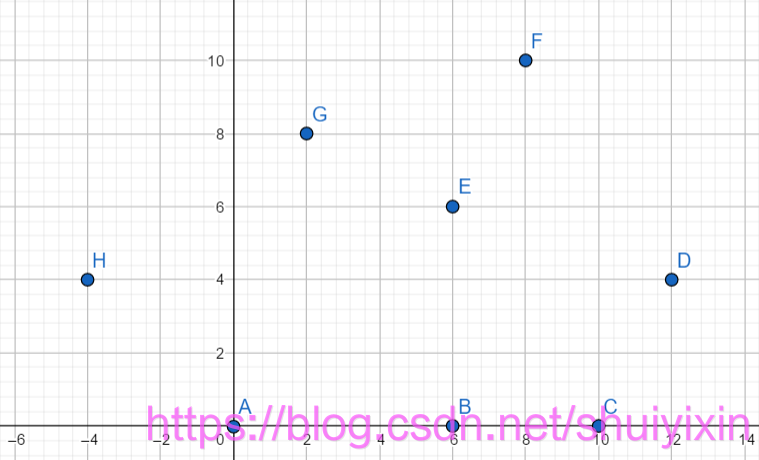
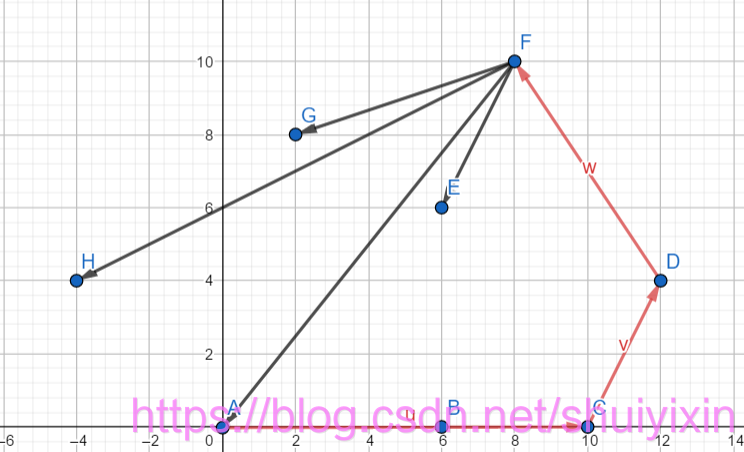
首先我们要先找到凸包中最下面的那个点(如果有多个,选择第一个)。所以,我们的A点是作为我们找到的第一个点,然后做A点到其他所有点的向量
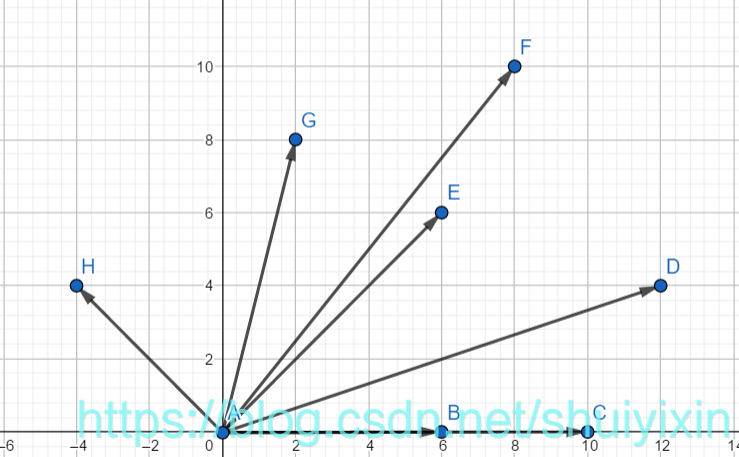
按照所有向量与x轴中夹角,然后将其排序为:
A, B, C, D, E, F, G, H
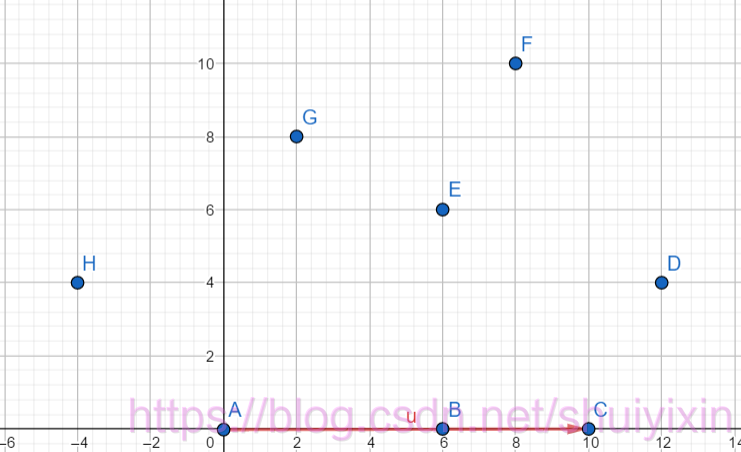
找夹角最小的点,如果有多个,选择与A距离最远的,所以我们找到点C,这样,我们连接点C,就找到了第一条连线,然后我们将ABC三个点压入栈中:
然后我们以点C为起点,做与其他点的向量,注意,因为ABC使用过,已经压入栈中,所以,不用再与AB两点做向量。
我们发现CD向量与X轴的夹角的角度最小,所以,我们将点D压入栈中,找到了第二条直线:
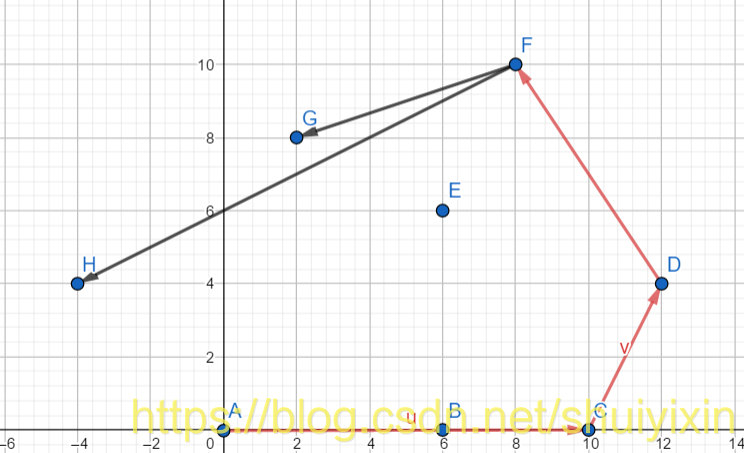
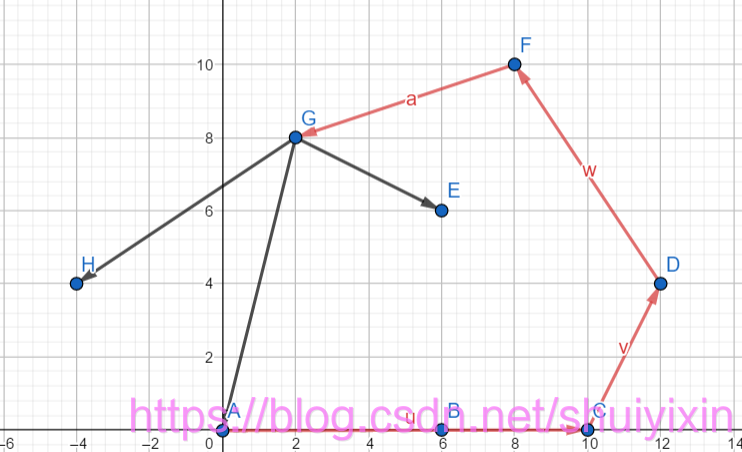
然后再以点D作为起点,做相同的操作,我们发现,DF向量与X轴的夹角最小。我们将点F压入栈中,找到了第三条直线,因为E在F前面,所以E点删除掉。
上面这个在具体实现过程中,要先做DE角度判断,因为是第一个,就是当前最大,所以压入栈中,当判断DF时,DF与X轴的夹角更小,所以我们让E出栈,就是删除了E点,F点入栈。然后判断GH,没有比DF更小的了,结束。
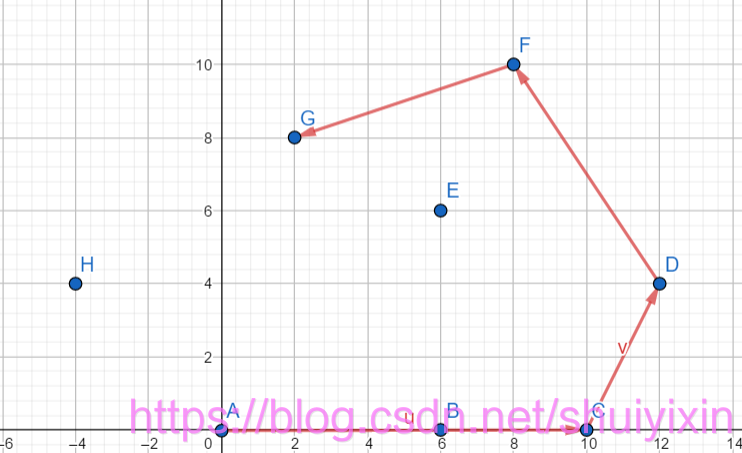
现在我们还有GH两个点,FG与X轴夹角更小,G点入栈,找到了第四条直线。
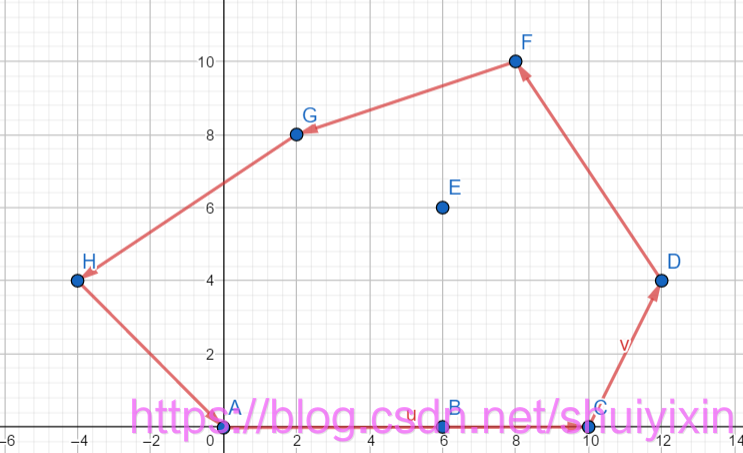
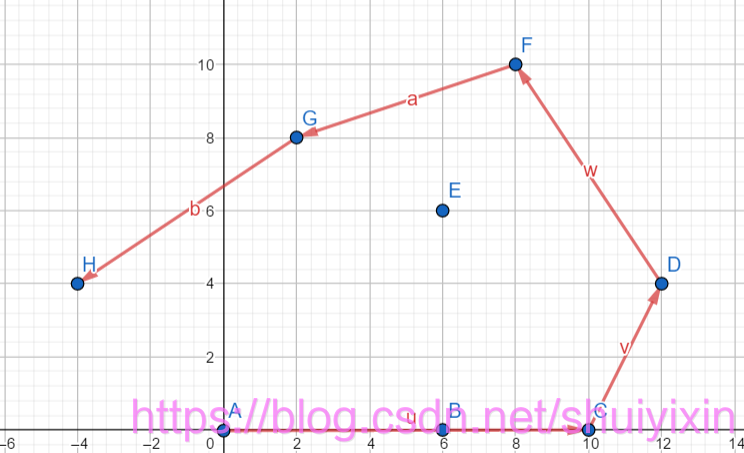
最后只剩下一个点,连接GH,HA,凸包就找到了。
2.Jarvis步进法
网上比较少有Jarvis步进法的详细讲解,我也是找了一些讲解的方法,然后结合自己的理解,讲一下这个方法。如果理解不对,还希望大家批评指正。
Jarvis步进法又叫包裹法,就是一步一步把所有的点都包裹进去。
我们考虑假设我们有一个很长的棍子,绕着一个不规则的多边形转动,每稳定一次,我们记录一次棍子的位置,当转动到以前记录的位置的时候,我们发现,我们就能得到这个不规则多边形的凸包:

假设我们是哈利波特的传人,我们坐在这根棍子上,棍子在AB上的时候,我们面朝AB向量指向的方向。那我们每次跟随棍子转动的时候,我们会发现,除了在棍子上的点,其余的点,都在我们身体的左侧,当我们转动一周后,就相当于把所有的点包裹起来了。
接下来我们来讲一下这种算法的思想
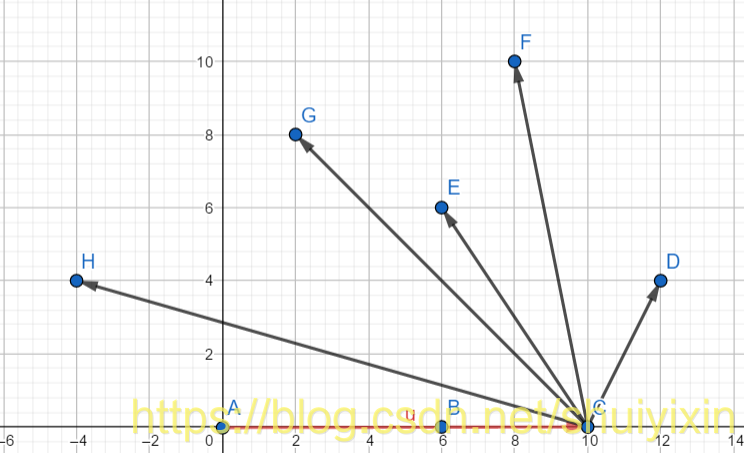
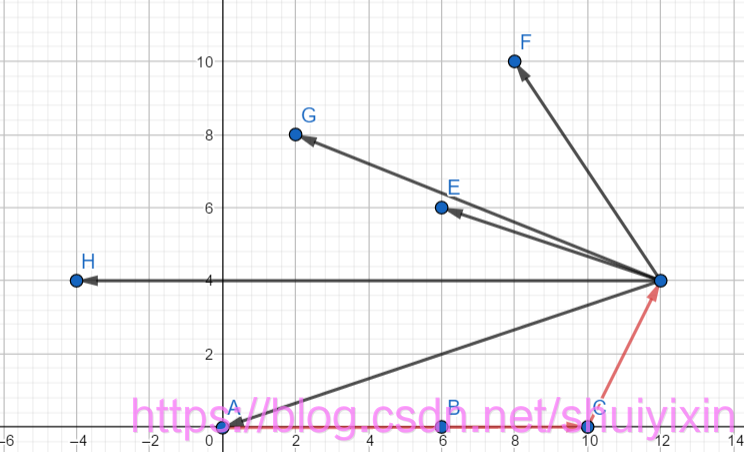
首先我们要先找到凸包中最下面的那个点(如果有多个,选择第一个),当然也有的说是最左边的那个点,这个其实没有关系,只是起点不同,重点是我们的思想。所以,我们的A点是作为我们找到的第一个点,然后做A点到其他所有点的向量:
我们找一个能让所有点都在向量方向左侧的模最大的向量(向量长度最长),也就是我们找到了C点。我们将AC连起来,然后将B,C点删除掉。
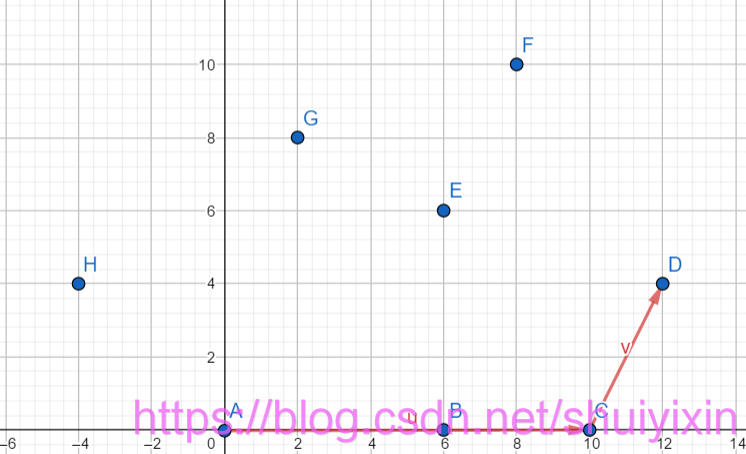
然后我们以点C为起点,做与剩余点的向量(包括CA向量):
我们找一个能让所有点都在向量方向左侧的模最大的向量(向量长度最长),我们发现是D点,将CD连起来,然后将D点删除:
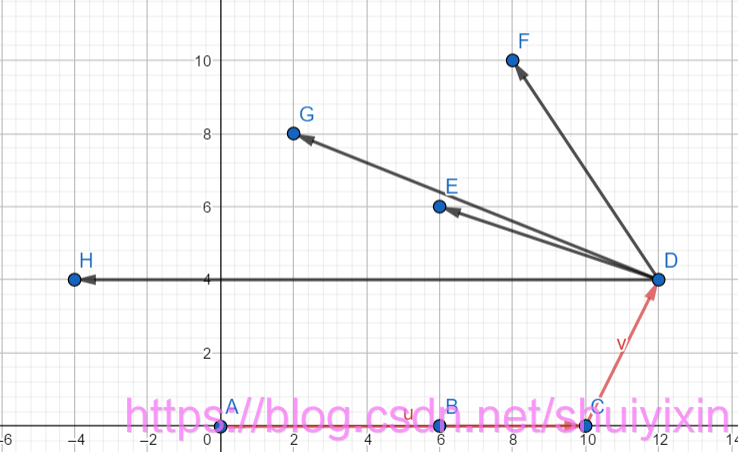
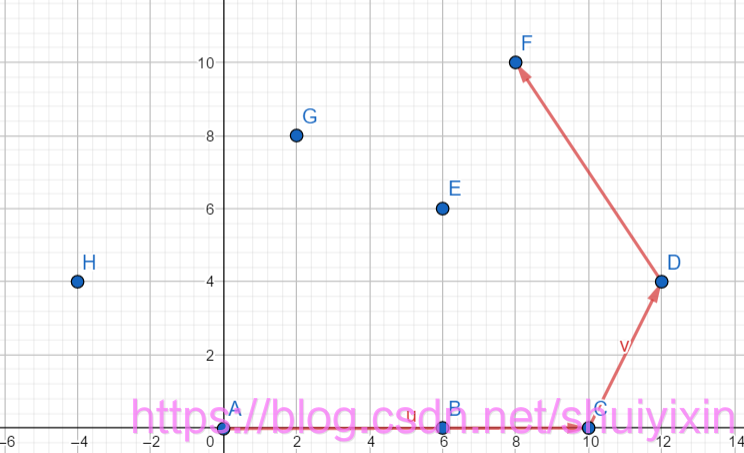
然后再以点D作为起点,做与剩余点的向量,我们找一个能让所有点都在向量方向左侧的模最大的向量(向量长度最长),我们发现是F点,将DF连起来,然后将F点删除:
然后再以点F作为起点,做与剩余点的向量,我们找一个能让所有点都在向量方向左侧的模最大的向量(向量长度最长),我们发现是G点,将FG连起来,然后将G点删除:
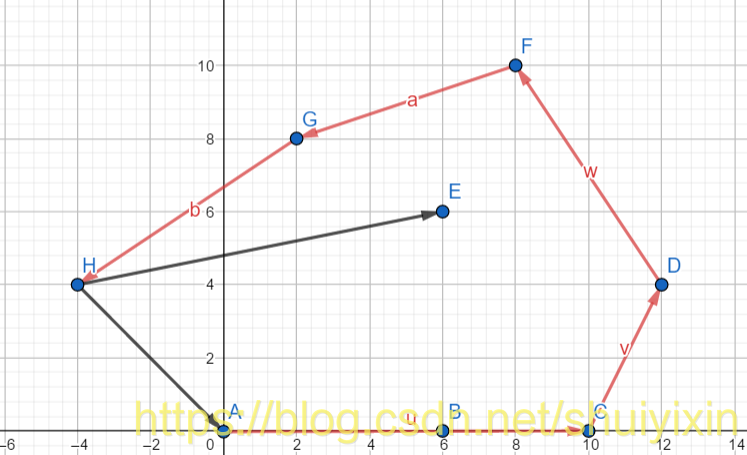
然后再以点G作为起点,做与剩余点的向量,我们找一个能让所有点都在向量方向左侧的模最大的向量(向量长度最长),我们发现是H点,将GH连起来,然后将H点删除:
然后再以点H作为起点,做与剩余点的向量,我们找一个能让所有点都在向量方向左侧的模最大的向量(向量长度最长),我们发现是A点,将HA连起来,因为A点是起始点,凸包绘制完毕。
3、凸包API
接下来我们讲一下绘制轮廓的API。
void drawContours(
InputArray points,
OutputArray hull,
bool clockwise = false,
bool returnPoints = true
);函数参数含义如下:
(1)InputArray类型的points,输入二维点集,存储在std::vector或Mat中。
(2)OutputArray类型的hull,输出凸包。它可以是索引的整数向量,也可以是点的向量。
(3)bool类型的clockwise,方向标志。如果为真,则输出凸包将顺时针方向。否则,它是逆时针方向的。假定坐标系的X轴指向右侧,Y轴指向上方。
(4)bool类型的returnPoints,操作标志。对于矩阵,当标志为真时,函数返回凸壳点。否则,返回凸壳点的索引。
这个API和昨天我们讲的轮廓绘制是类似的不同的是参数,凸包可以理解为不是那么太标准的轮廓。
4、代码展示
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
Mat src, src_gray, dst;
const char* input_win = "【输入图像】";
const char* output_win = "【输出图像】";
const char* trackbar_title = "Threshold:";
int threshold_value = 100;
int threshold_max = 255;
RNG rng(12345);
void Threshold_Callback(int, void*);
int main()
{
src = imread("E:/个人/学习/编程/C++/CPlusPlusTestProgram/LearnOpenCV/image/ConvexHull1.png");
if (!src.data)
{
cout << "could not load image !";
waitKey(0);
return -1;
}
namedWindow(input_win, CV_WINDOW_AUTOSIZE);
namedWindow(output_win, CV_WINDOW_AUTOSIZE);
imshow(input_win, src);
cvtColor(src, src_gray, CV_BGR2GRAY);
blur(src_gray, src_gray, Size(3, 3));
createTrackbar(trackbar_title, output_win, &threshold_value, threshold_max, Threshold_Callback);
Threshold_Callback(0, 0);
waitKey(0);
return 0;
}
void Threshold_Callback(int, void*) {
Mat src_copy = src.clone();
Mat threshold_output;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
threshold(src_gray, threshold_output, threshold_value, 255, THRESH_BINARY);
findContours(threshold_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
vector<vector<Point> >hull(contours.size());
for (int i = 0; i < contours.size(); i++)
{
convexHull(Mat(contours[i]), hull[i], false);
}
//Mat drawing = Mat::zeros(threshold_output.size(), CV_8UC3);
for (int i = 0; i< contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
//drawContours(drawing, contours, i, color, 2, 8, vector<Vec4i>(), 0, Point());
drawContours(src, hull, i, color, 2, 8, vector<Vec4i>(), 0, Point());
}
imshow(output_win, src);
}
5、执行结果

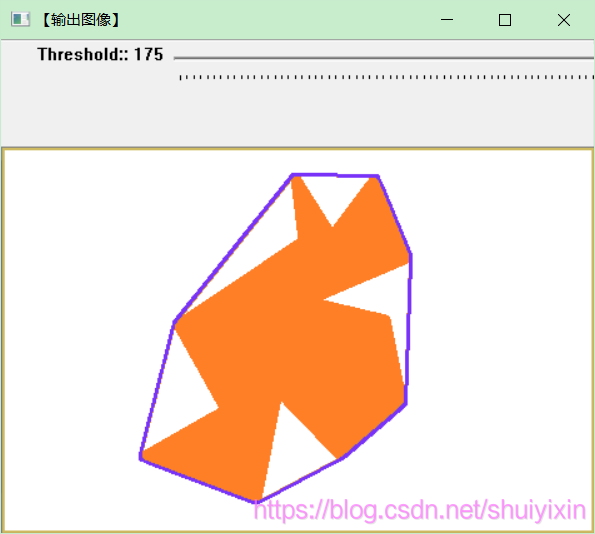
大家也可以自己尝试一下呀,一定要多做练习!

















 1226
1226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









