



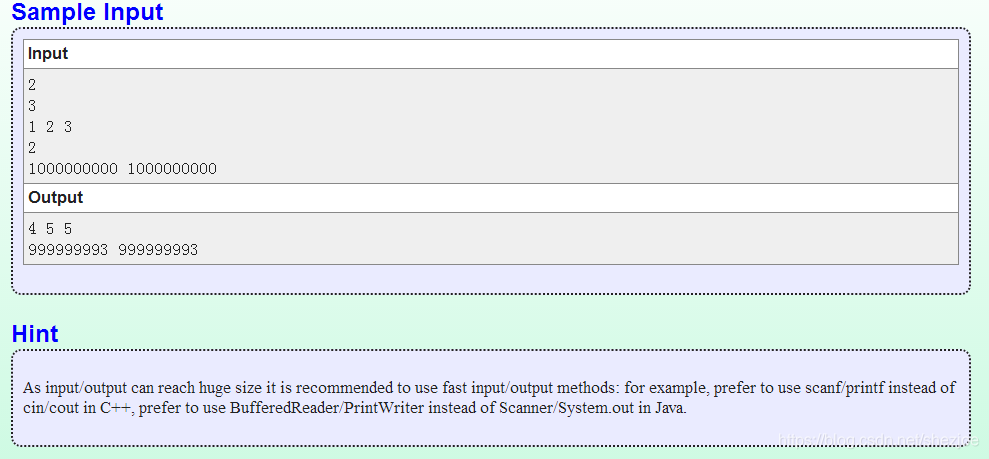
 博客介绍了pair函数,包括其定义形式如pair<变量类型1,变量类型2>,可用make_pair建立并赋值,还说明了访问pair中值的方法。同时给出解题思路,根据数与mod的关系确定答案,也提及可用二分搜索符合情况的数。
博客介绍了pair函数,包括其定义形式如pair<变量类型1,变量类型2>,可用make_pair建立并赋值,还说明了访问pair中值的方法。同时给出解题思路,根据数与mod的关系确定答案,也提及可用二分搜索符合情况的数。
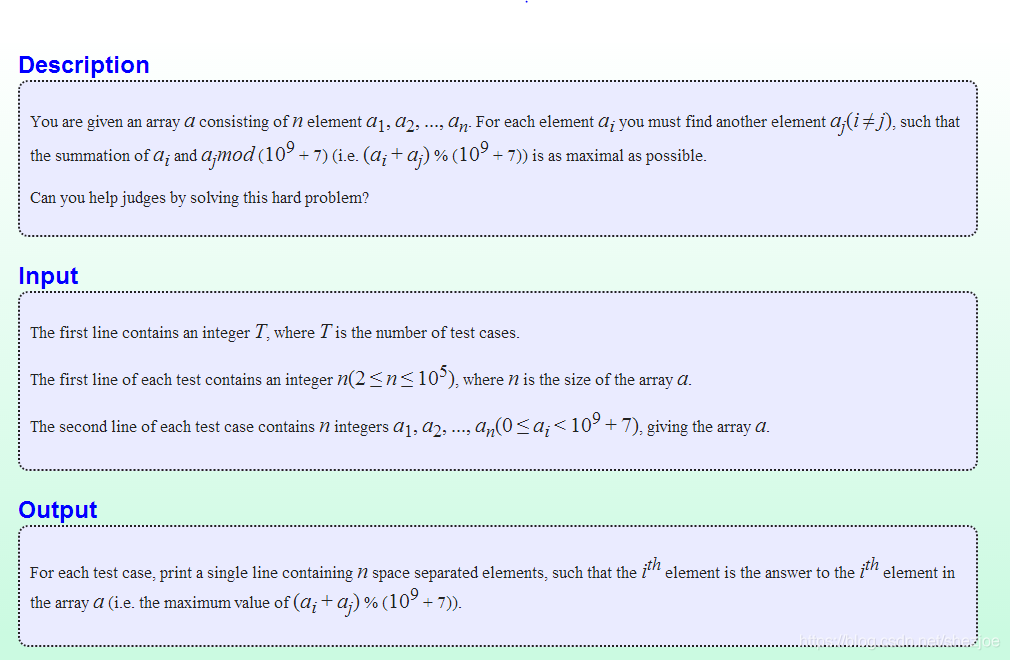
学到了一个pair函数,pair<变量类型1,变量类型2>,如pair<int,int>,pair<string,int>,pair<char,char>......
make_pair用来建立并赋值。
pair<int,int> a[N]: a[i].first和a[i].second分别访问pair中的第一个值和第二个值。
以上。
思路:因为所有数都不会超过mod,所以对于任意x,加上一个y小于mod的时候,最后的值是在x到mod之间的。
但是加上一个y大于等于mod小于等于2*mod的时候,最后得到的值(%mod后)是在0到x之间的。
所以只要有y使x+y<mod,则x+y就一定是最后的答案。只要当不存在这样的y时,才考虑x+y>=mod的情况,这时其实只要取最大的数即可。
(另一种做法是用二分每次搜索符合情况的数)
#include <iostream>
#include <string>
#include <cstring>
#include <cstdlib>
#include <cstdio>
#include <algorithm>
#define ll long long
#define mod 1000000007
using namespace std;
const int maxn=1e5+10;
pair<ll,int> a[maxn];
ll ans[maxn];
int T,n;
ll t;
void init()
{
sort(a+1,a+n+1);
int j=n;
for(int i=1; i<=n; i++)
{
for(; j>=1; j--) //因为从小到大排列,所以在找符合mod-a[i].first>0的a[j].first越来越小,每次只要从上一次的位置开始往前找就行。
//如果每次都从最后的数n找一遍会超时。
{
if(i==j)
continue;
if(a[i].first+a[j].first>=mod)
continue;
ans[a[i].second]=a[i].first+a[j].first;
break;
}
if(ans[a[i].second]==-1)
{
ans[a[i].second]=(a[i].first+a[i==n?n-1:n].first)%mod;
}
}
for(int i=1; i<=n; i++)
{
printf("%lld ",ans[i]);
}
printf("\n");
}
int main()
{
scanf("%d",&T);
while(T--)
{
memset(a,0,sizeof(a));
memset(ans,-1,sizeof(ans));
scanf("%d",&n);
for(int i=1; i<=n; i++)
{
scanf("%lld",&t);
a[i]=make_pair(t,i);
}
// for(int i=1;i<=n;i++)
// {
// cout<<a[i].first<<" "<<a[i].second<<endl;
// }
init();
}
return 0;
}

















 3992
3992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









