



【基本信息】
论文标题:Data-Driven Variable Impedance Control of a Powered Knee–Ankle Prosthesis for Adaptive Speed and Incline Walking
作者名单:T. Kevin Best; Cara Gonzalez Welker; Elliott J. Rouse; Robert D. Gregg
发表期刊:IEEE Transactions on Robotics (TRO)
发表时间:2023年6月
【访问链接】
论文链接:https://ieeexplore.ieee.org/document/10017125
【研究背景】
假肢是一种常见的可穿戴式机器人,包括上肢、下肢、足踝等不同种类,可用于辅助因疾病和事故导致截肢的患者实现对应肢体的功能代偿,从而帮助患者恢复日常的生活能力。

在相关技术还不成熟的时候,市面上常采用被动驱动的假肢,即假肢的各个关节采用的是纯机械装置来实现,没有电机等主动驱动的机构,也能实现一定的功能代偿。
但主动运动的缺乏带来的最大问题是假肢的运动功能受限,导致在一些复杂的场景中(比如复杂的地形环境、不同的行走速度等),假肢能提供的功能代偿极为有限,且效果往往不佳,给用户的使用过程带来极大的不便。

后来,随着机械结构和驱动技术的升级,主动型假肢开始进入人们的视野,并且以能够提供更加丰富、灵活、拟人的功能代偿为主要目标,希望能够代偿大部分的肢体功能。
【科学问题】
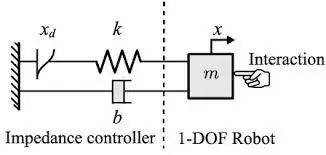
由于地形和任务场景的复杂性,主动型假肢设备往往需要复杂的控制策略,其中,阻抗控制是最为常见的一种控制方法。
阻抗控制可以通过调整控制参数来驱动关节产生不同的力矩,使其变得“更刚”或者“更柔”,从而可以在高精度跟踪位置参考曲线和允许一定误差范围的柔性控制之间进行调整,可适应多种任务场景和需求。
但是,针对假肢设备来说,现有的阻抗控制方法难以适应不同任务场景的需求。
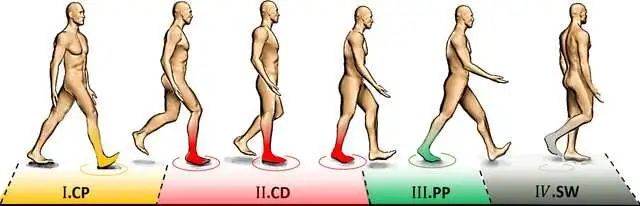
以下肢假肢为例,传统的阻抗控制方法大多依赖于有限状态机(Finite State Machine,FSM)进行策略设计,将运动过程分为不同的步态相位并进行独立的阻抗控制参数设计,导致控制模式复杂且控制器的参数量大,且这些参数需要事先确定或手动调整,无法自适应不同的用户需求和任务场景。

后来,有学者提出了利用连续的函数拟合方法来定义阻抗参数,构建可变阻抗控制器,从而解决控制过程不连续的问题,提供更加仿生的控制策略。
但是,由于任务场景和用户需求的实时变化,如何能够准确定义变阻抗的函数拟合过程,从而实现连续、平滑、仿人的假肢辅助步行过程依旧是一个尚未解决的问题。
【核心思路】
该论文针对用于辅助步行的主动驱动型下肢假肢进行研究,主要解决其在复杂的地形环境和变速步行场景中的变阻抗控制问题,提升假肢在复杂场景中的运动性能和运动的仿生性。
论文所提出的方法是一种基于步态相位的、自适应不同步行任务的控制策略,通过引入和组合支撑阶段的连续阻抗控制策略和摆动阶段的运动学控制策略构建混合控制策略,可以充分适应步态支撑阶段和摆动阶段对于关节控制器的力矩需求,提供全步态周期的连续平滑控制过程。
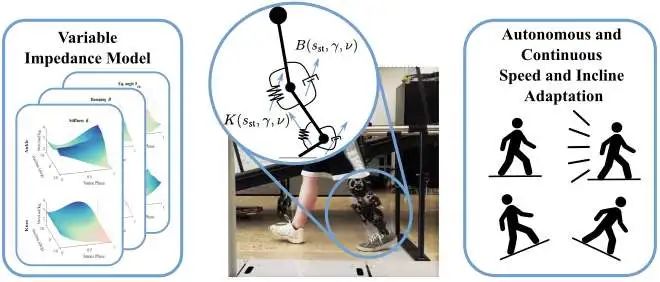
算法的核心框架如下图:
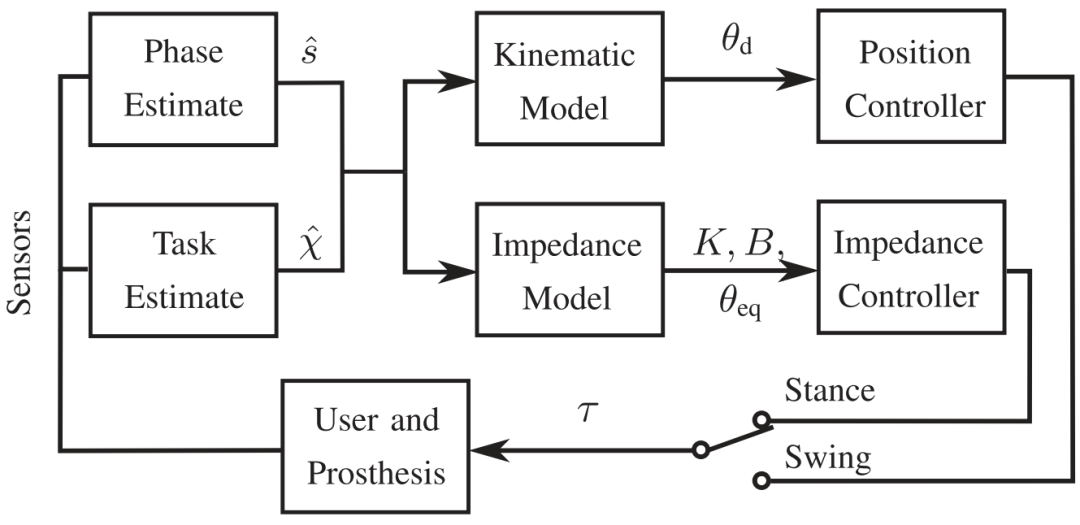
从图中可以看出,该论文提出的混合运动阻抗控制器可实时估计步态相位 和任务 (论文中主要指的不同的步行速度),并根据当前腿处于支撑相还是摆动相分别选择位置控制器和可变阻抗控制器来生成对应的力矩,从而实现多任务场景的自适应。
主要创新部分如下:
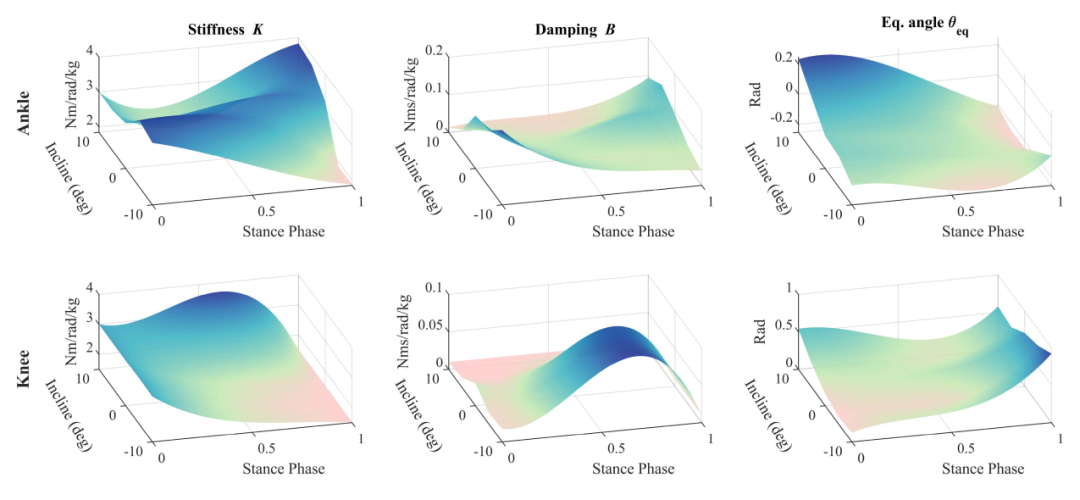
提出了一种新的基于健康人数据集驱动的步态相位连续建模方法,并基于支撑相的关节刚度、阻尼和平衡力矩、步行速度以及地形坡度构建了步态相位的连续函数估计方法;并且,与类似的摆动关节运动学模型相结合,该论文提出的混合控制器可根据实时相位、速度和坡度估计在不同任务中自适应行为;
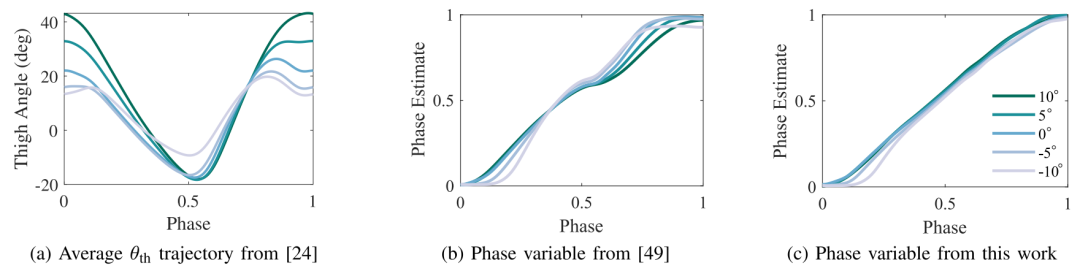
提出一种改进的相位变量,该变量可以避免运动学计算中的奇点姿态,能鲁棒自适应可变步行任务中的大腿轨迹。作者对两名膝上截肢者进行了验证实验,证明所提出的自适应控制器在不同任务中在关节运动学、动力学、功和步频方面均产生了更加放生的运动趋势;
作者进行了充分的实验,且在大多数测试指标中,该论文提出的控制器达到或超过了手动调整的基准有限状态机(FSM)阻抗控制器的性能,这表明该论文优化的运动学和阻抗模型充分捕捉了可变任务步行的关键生物力学信息并能够自动调整参数对其进行适应。
最终,基于上述过程,该论文构建了一个二次优化问题,结合了步行任务、穿戴者的基本信息,可以根据不同的任务参数特点、步态所处的相位阶段等实时优化当前阻抗控制起的参数,实现连续的控制过程。
对步行速度的实时估计采用的是三连杆腿结构,包括大腿、小腿和足部连杆,基于关节角度传感器和IMU姿态传感器进行数据采集,计算前后腿在 Heel Strike 和 Toe Off 相位时的相对距离和迈步时间来计算步行速度。
对地形坡度的估计是基于当足部与地面完整接触时的膝-踝关节角度来计算的,通过大腿上的IMU来获得绝对姿态,并通过膝关节、踝关节的关节角度关系来计算此时足部所接触的平面的水平坡度。
值得注意的是,论文所构建的针对支撑相的可变阻尼控制器参数是一个根据步态相位连续变化的函数,可根据步行速度、地形坡度自适应调整输出力矩来适应不同的任务。

而摆动相的位置跟踪控制器是一个典型的PD控制器,根据当前的跟踪位置误差和速度误差生成相应的力矩:

为了确保支撑阶段到摆动阶段的连续性和平滑性,作者引入了一个随时间变化的全局权重 来调整从支撑相的变阻抗控制器到摆动相的位置控制器的平滑性。

【实验结果】
该论文提出的方法在一个真实的膝-踝假肢上进行了实验,相比于其他基于有限状态机的传统阻抗控制方法,该论文提出的方法可以得到更加平滑和连续的步行辅助力矩,从而使得整个步行姿态更加自然。
论文视频如下:
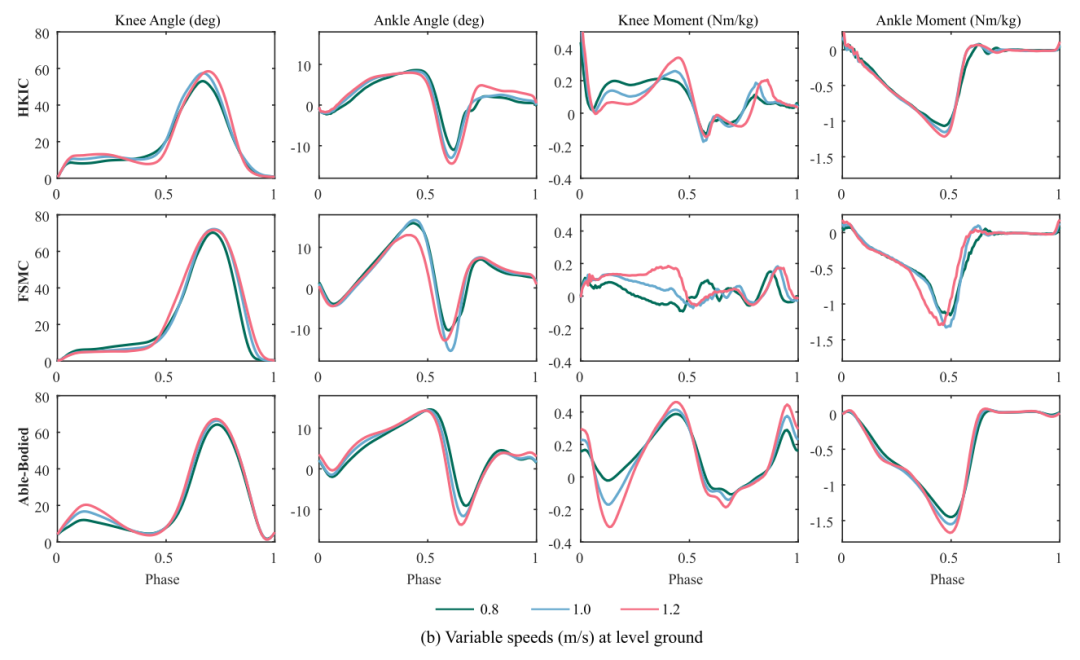
论文的实验数据表明,该论文提出的数据驱动的变阻抗控制算法能够更好地学习健康人的步行过程,从而生成更加拟人的关节控制策略。
该论文提出的方法能适应多种地形坡度:
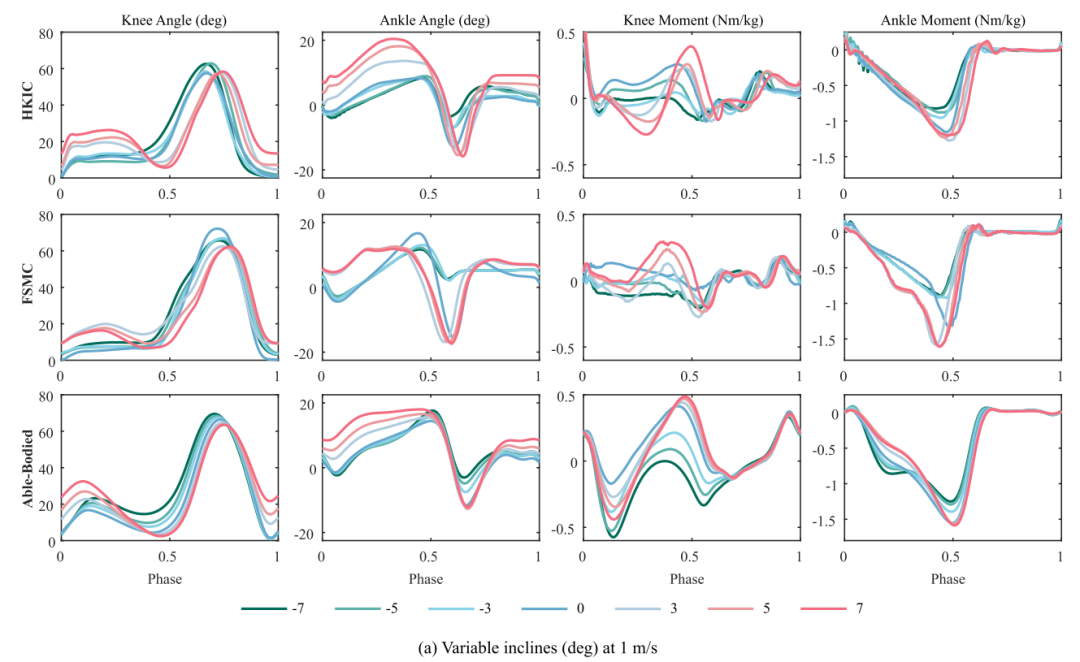
从图中可以看出,相比于基于有限状态机的方法,该方法控制下所产生的膝关节和踝关节运动角度与健康人更加接近,力矩曲线也更加平滑。
此外,该方法也能适应多种步行速度:


















 470
470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











